 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
您對使用 Arduino 控制輪式機器人感興趣嗎?我敢肯定,在某些時候,您想控制自己的機器人。但是,總是有一個大問題:我沒有帶輪子的機器人。如何測試我的編程控制邏輯?
當我沒有自己的機器人時,我也總是問自己這個問題。正是出于這個原因,我與 JLCPCB 公司合作建造了印刷電路板機器人車。

接下來,我們將展示構建 Arduino 控制的 PCB 機器人車項目的完整結構。
使用 Arduino 開發 JLCPCB 機器人車
JLCPCB 機器人車采用 8 個 LED 和一個超聲波傳感器來檢測障礙物。如您所見,2 個藍色 LED 用于表示機器人的輪子。
此外,我們在每個后視鏡中有 2 個紅色 LED,在汽車前部有 4 個照明 LED。
使用這 8 個 LED,我們可以進行多種類型的模擬。例如,通過它們,您可以發出向前、向后、向左和向右移動的信號。
此外,當物體非常靠近汽車時,激活一些 LED。
您喜歡 JLCPCB 機器人車的各種可能性嗎?如果您喜歡它,讓我們了解如何使用 Arduino 構建我們自己的 JLCPCB 機器人車。
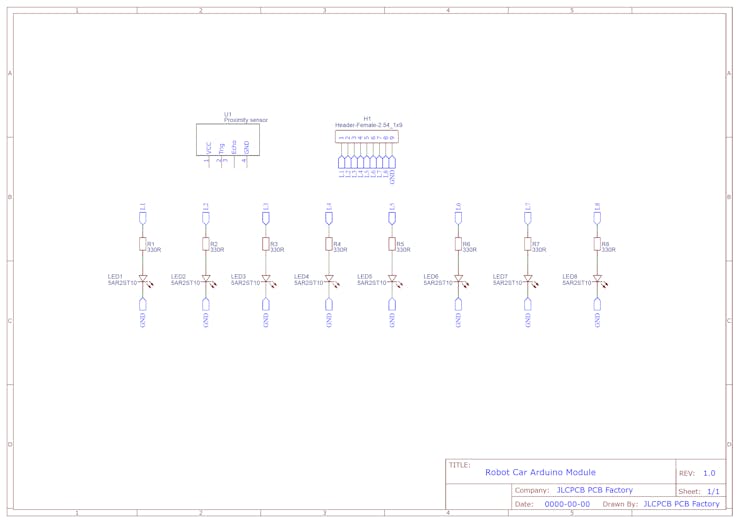
上面的示意圖顯示了電子板的電路元件的連接結構。
從這個電子方案,電子板被開發出來。該板的電子結構如下圖所示。
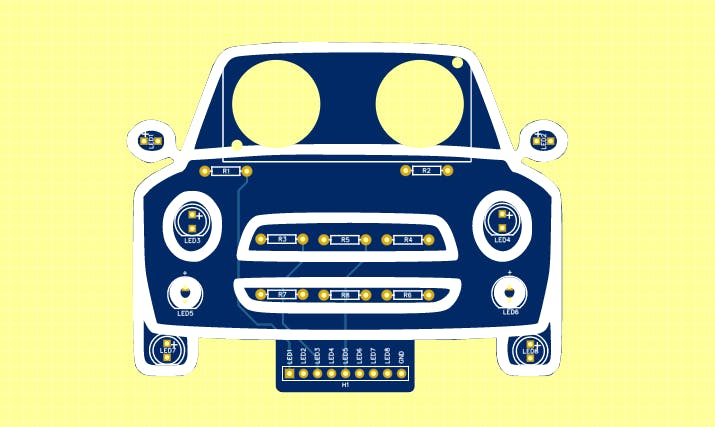
該板的結構非常簡單,可以連接到原型板。
此外,還有一些孔可以將超聲波傳感器連接到 JLCPCB 機器人車的后部。
從那里,您將學習如何創建邏輯并將 JLCPCB 機器人車與 Arduino 一起使用。
為此,我們將解決以下問題:
當 JLCPCB 機器人車檢測到障礙物時,用 Arduino 制定一個項目來偏轉 JLCPCB 機器人車。機器人必須向右轉,激活后視 LED 并在離開障礙物后繼續前進。
現在,讓我們動手開發這個項目。
使用 Arduino 開發 JLCPCB 機器人車
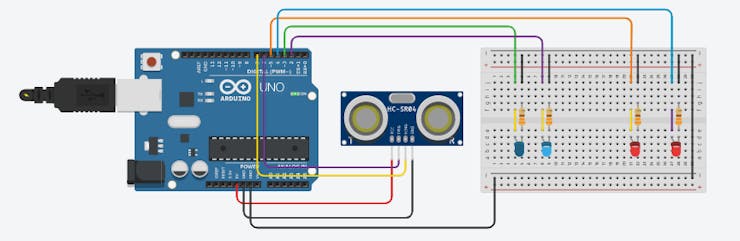
首先,我們必須構建下圖中的電路。該電路由傳感器和帶有車輪和前照燈的汽車的 LED 組成。
_wnHGmvoie7.png?auto=compress%2Cformat&w=740&h=555&fit=max)
從這個電路中,創建了下面的編程邏輯。該邏輯旨在模擬汽車從任何障礙物轉移。如果汽車距離障礙物不到 30 厘米,汽車必須打開 LED 并啟動發動機,這樣它才能改變方向。
當車輛遠離物體時,即距離大于 30 厘米時,LED 將關閉。
#define echoPin 9
#define trigPin 8
long time = 0;
int measure = 0;
void setup()
{
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
time = pulseIn(echoPin, HIGH);
measure = time * 0.034 / 2; // Speed of sound wave divided by 2 (go and back)
if(measure <= 30)
{
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
}
if(measure > 30)
{
digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(3, LOW);
digitalWrite(2, LOW);
}
}
該程序的操作非常簡單。
最初,聲明了超聲波傳感器連接引腳的名稱,還聲明了程序變量。代碼部分如下所示。
#define echoPin 9
#define trigPin 8
long time = 0;
int measure = 0;
接下來,我們聲明 void setup 函數。此函數用于將引腳配置為 LED 的輸入和輸出以及超聲波傳感器的引腳。代碼部分如下所示。
void setup()
{
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
之后,我們進入循環函數。首先,我們觸發傳感器的觸發并將信號到達和返回的時間存儲在時間變量中。代碼部分如下所示。
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
time = pulseIn(echoPin, HIGH);
計算好時間后,還要計算距離。使用下面的公式計算距離。
measure = time * 0.034 / 2; // Speed of sound wave divided by 2 (go and back)
我們根據聲音在空氣中傳播的平均速度計算距離,即 340 m/s。
我們將它除以 2,因為我們只需要與波之間的距離,因為計算出的時間等于聲音通過空氣返回和返回的時間。
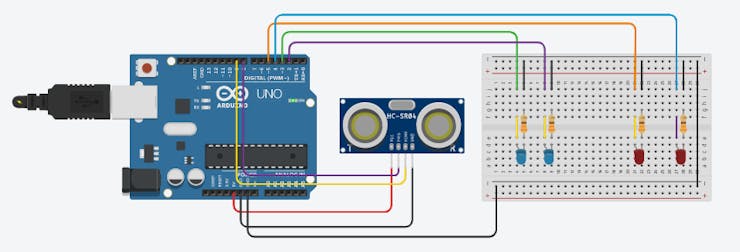
最后,我們將檢查機器人在任何障礙物處的距離范圍。如果距離小于或等于 30,則驅動其中一個車輪并打開兩個 LED,以指示它正在進行轉向運動。
下圖顯示了 LED。
之后,我們就有了第二個條件。第二個條件檢查距離值是否大于 30。如果為真,則打開兩個電機(藍色 LED)并關閉前照燈 LED。
這可以在下圖中看到。
最后,在最后一次檢查之后,代碼流回到開頭,一切都重新開始運行。
該項目是使用 JLCPCB 開發的,您可以在下面的主題中下載此文件。
項目下載文件
所有文件都在下面的附件部分。
致謝
我們感謝JLCPCB的支持和合作,以低成本和可訪問性生產項目。
- 在機器人汽車上實現超聲波傳感器
- 超聲波傳感器使用說明書 22次下載
- 微型智能機器人手指關節使用超聲波電機的優勢 0次下載
- 微型機器人關節使用超聲波電機之后有哪些優勢 21次下載
- 【超聲波傳感器】超聲波傳感器使用問題詳解! 23次下載
- 基于超聲波測距的機器人局部導航 22次下載
- 基于FPGA的超聲波傳感器前端電路設計 14次下載
- Arduino應用_Arduino連接超聲波傳感器測距 148次下載
- 位差超聲波傳感器在智能玩具機器人中的應用 70次下載
- 機器人測距傳感器的研究 161次下載
- 超聲波傳感器概述 128次下載
- 在線測量酵母濃度的超聲波傳感器
- 移動機器人超聲波避碰傳感器系統設計
- H ERO - Ⅰ機器人及其傳感器
- 在線測量酵母濃度的超聲波傳感器
- 超聲波傳感器如何接線_超聲波傳感器測距 1.7w次閱讀
- 超聲波傳感器構成的超聲波加濕器電路 8250次閱讀
- 超聲波傳感器的優勢有哪些 4368次閱讀
- 超聲波傳感器的應用 1890次閱讀
- 采用AT89C51微處理器和olaroid 600系列傳感器實現超聲波測距系統設計 1356次閱讀
- 超聲波傳感器的使用注意事項說明 3116次閱讀
- dfrobotSRF02超聲波傳感器介紹 1748次閱讀
- 超聲波傳感器的優勢特點及應用介紹 4056次閱讀
- 超聲波傳感器與紅外線傳感器對比誰更好 1.2w次閱讀
- 超聲波傳感器內部結構及特點 1.8w次閱讀
- 關于超聲波測距儀在機器人系統中的作用 5754次閱讀
- 超聲波傳感器及工作原理解析 9866次閱讀
- 機器人自動導航的超聲波傳感器介紹 3322次閱讀
- 超聲波傳感器有哪些用途_可以應用到什么地方 3.6w次閱讀
- 超聲波傳感器的原理及應用 1.1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1錦銳科技CA51F2 SDK開發包
- 24.06 MB | 29次下載 | 1 積分
- 2涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 4次下載 | 1 積分
- 3錦銳CA51F005 SDK開發包
- 19.47 MB | 3次下載 | 1 積分
- 4蘋果iphone 11電路原理圖
- 4.98 MB | 3次下載 | 2 積分
- 5基礎模擬電子電路
- 3.80 MB | 2次下載 | 1 積分
- 6FS4059B、FS4059C雙節鋰電池充電應用圖
- 0.05 MB | 1次下載 | 免費
- 7RA-Eco-RA6M4-100PIN-V1.0開發板資料
- 34.89 MB | 1次下載 | 免費
- 8RF9209 低功耗高靈敏EM9209 2.4G通信模塊規格書
- 565.33 KB | 次下載 | 免費
本月
- 1AI智能眼鏡產業鏈分析
- 4.43 MB | 382次下載 | 免費
- 2蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 296次下載 | 5 積分
- 3貼片三極管上的印字與真實名稱的對照表詳細說明
- 0.50 MB | 94次下載 | 1 積分
- 4長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 91次下載 | 5 積分
- 5錦銳科技CA51F2 SDK開發包
- 24.06 MB | 29次下載 | 1 積分
- 6AO4803A雙P通道增強型場效應晶體管的數據手冊
- 0.11 MB | 28次下載 | 2 積分
- 7長虹液晶彩電LS29機芯的技術資料說明
- 3.42 MB | 16次下載 | 2 積分
- 8802.11_Wireless_Networks
- 4.17 MB | 12次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191388次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論