 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
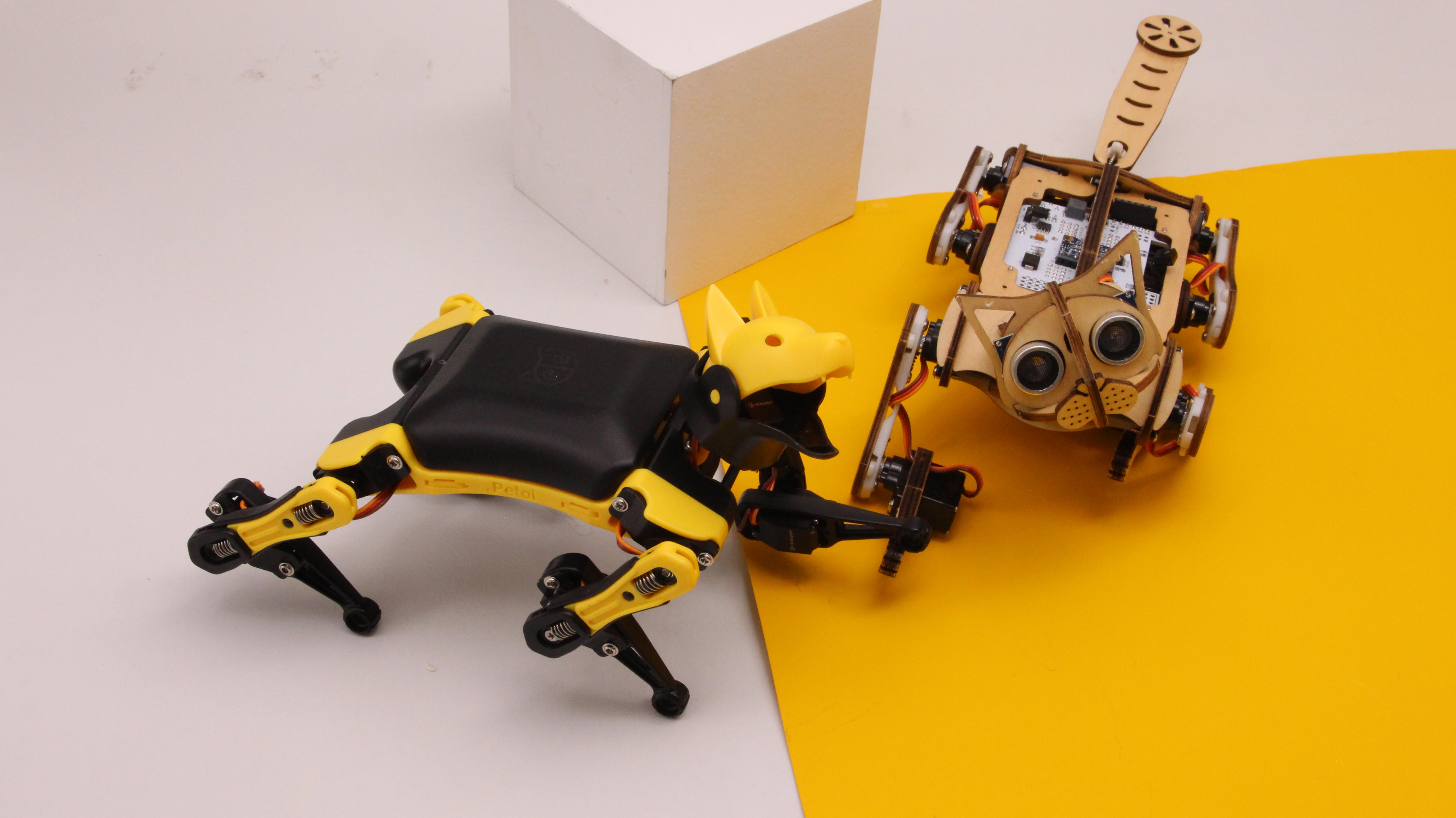
本文的主題將是 SLAM 和 ROS 映射。我們將使用來自 Petoi 的敏捷四足機器人 Bittle,它在上個月完成了他們的 Kickstarter 活動并取得了巨大成功。
首先讓我們從一些理論開始。
2022 年 4 月 4 日更新。我盡我所能定期更新我的文章,并根據您在 YouTube/Hackster 評論部分的反饋。如果您想表達對這些努力的支持和贊賞,請考慮給我買杯咖啡(或披薩):)。
什么是SLAM?
SLAM 代表 Simultaneous Localization and Mapping - 它是一組算法,允許計算機創建 2D 或 3D 空間地圖并確定其在其中的位置。雖然 SLAM 本身并不是導航,但擁有地圖并知道您在地圖上的位置是從 A 點導航到 B 點的先決條件。
我們可以使用各種傳感器來接收有關可用于映射的環境的數據
- 激光掃描儀(一維和二維(掃描)激光測距儀)
- 相機(單目、立體和 RGB-D)
- 聲納傳感器
- 觸覺傳感器
- 其他
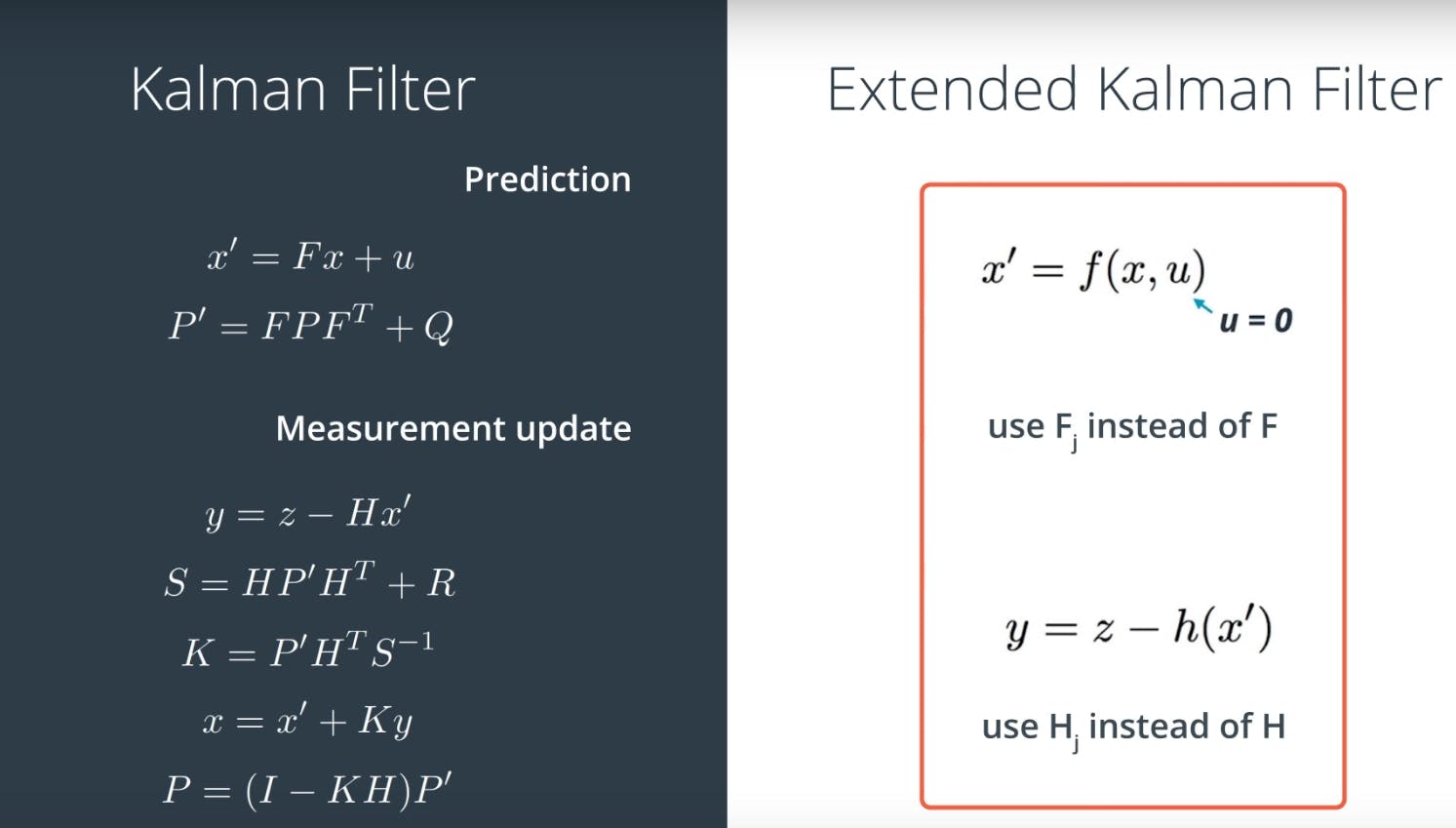
在實踐中很多時候使用傳感器的組合,然后應用融合算法,例如擴展卡爾曼濾波器,以獲得精確的信息。
如果我們回到基礎,對于大多數應用程序,您將處理基于 LIDAR 的 SLAM 或視覺 SLAM。基于激光雷達的 SLAM 相對容易設置并且非常精確——Waymo 在其自動駕駛汽車上使用激光雷達是有原因的。

但當然,特斯拉沒有這樣做是有原因的——激光雷達體積龐大、價格昂貴,而且它們的旋轉部件需要在較長時間內運行時進行維護。對于視覺 SLAM,RGB-D 傳感器方法也可以非常強大,而簡單的立體或單目系統可能很難設置。以下是描述中的更多鏈接,以詳細了解 SLAM!
在本文中,我們將嘗試稱為 ORB-SLAM2 的單目視覺 SLAM 算法和基于激光雷達的 Hector SLAM。
使用 ORB-SLAM2 的視覺 SLAM
對于 ORB-SLAM2,我們將使用普通的廉價網絡攝像頭——需要對其進行校準以確定每個攝像頭型號所獨有的內在參數。我建議使用內置的 ROS 相機校準工具進行校準。要安裝這些(您可以安裝在您的 Ubuntu PC 上):
sudo apt-get install ros-melodic-camera-calibration
以毫米為單位測量正方形的邊。然后輸入以下命令開始校準:
roslaunch usb_cam usb_cam.launch
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 image:=/camera/image_raw camera:=/camera
更改 square 參數以匹配校準板上的正方形大小。

為了獲得良好的校準,您需要在相機框架中移動棋盤格,以便:
- 相機視野左、右、上、下的棋盤
- X 條 - 視野中的左/右
- Y 條 - 視野中的頂部/底部
- 尺寸欄 - 朝向/遠離和傾斜相機
- 相機左側、右側、頂部和底部的棋盤 X 欄 - 左側/右側在視野中 Y 欄 - 頂部/底部在視野中尺寸欄 - 朝向/遠離和傾斜相機
- 棋盤格填滿整個視野
- 棋盤向左、右、上和下傾斜(傾斜)
在每一步,保持棋盤靜止,直到圖像在校準窗口中突出顯示。
當應用程序收集到足夠的數據時,您將能夠按下校準按鈕。校準過程可能需要幾分鐘,所以請耐心等待。成功的校準將導致現實世界中的直邊在校正后的圖像中顯得筆直。校準失敗通常會導致空白或無法識別的圖像,或不保留直邊的圖像。
之后你需要借助這個包將相機參數轉換成.yaml格式,重命名為head_camera.yaml,放到.ros/camera_info/文件夾下。
有一個將 ORB-SLAM2 集成到 ROS 的包,它還發布了 2D 占用圖。安裝過程比較復雜,我推薦使用 Ubuntu 18.04 的樹莓派鏡像作為起點,避免編譯很多(很多很多很多)額外的包。
安裝 ROS 桌面和必要的依賴項
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-melodic-desktop
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt-get install ros-melodic-pcl-ros ros-melodic-image-geometry ros-melodic-octomap-ros ros-melodic-usb-cam
創建 catkin 工作區,安裝catkin構建工具并將 ORB_SLAM2_ROS 存儲庫和 Bittle 驅動存儲庫克隆到 catkin_ws/src 文件夾
mkdir -p catkin_ws/src && cd catkin_ws/src
git clone https://github.com/rayvburn/ORB-SLAM2_ROS
git clone https://github.com/AIWintermuteAI/bittle_ROS
cd bittle_ROS && git checkout slam
下載詞匯文件并將其放在ORB_SLAM2/orb_slam2_lib/Vocabulary文件夾中
wget https://github.com/raulmur/ORB_SLAM2/raw/master/Vocabulary/ORBvoc.txt.tar.gz
然后從 catkin 工作區文件夾中,執行
cd src/ORB-SLAM2_ROS/ORB_SLAM2
sudo chmod +x build*
./build_catkin.sh
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果編譯過程凍結,請嘗試將交換大小增加到 2 Gb
sudo swapoff -a
sudo fallocate -l 2G /swapfile
sudo chmod 600 /swapfile
sudo mkswap /swapfile
sudo swapon /swapfile
grep SwapTotal /proc/meminfo
以后如果不需要,可以刪除交換文件。成功安裝后,運行一個示例以確保它按預期工作:
roslaunch orb_slam2_ros raspicam_mono.launch
需要一個額外的步驟,因為您很可能在無頭模式下運行 Raspberry Pi(或其他 SBC),沒有屏幕或鍵盤 - 無論是那個還是您的機器人都非常笨重。因此,我們需要配置 ROS 以在多臺機器上工作 - 請查看我之前在 BITtle 系列中的文章,其中詳細描述了此過程。
由于 Bittle 驅動程序是用 Python 3 編寫的,而 ROS 默認仍使用 Python 2.7,因此我們需要為 Python 3 安裝 rospkg 以使它們一起運行。
pip3 install rospkg
一旦你有了 ORB-SLAM2 和Bittle(或你的機器人基地)的軟件包,你就可以運行網絡攝像頭驅動程序了
roslaunch bittle_driver bittle_vslam_robot.launch
它將啟動整個系統——機器人驅動程序、網絡攝像頭節點和 ORB-SLAM2。ORB-SLAM2 需要足夠的環境信息來初始化,因此您可以手動移動機器人以避免平移或方向的大變化。ORB-SLAM2 初始化后將開始發布八圖。您可以使用控制來移動您的機器人。
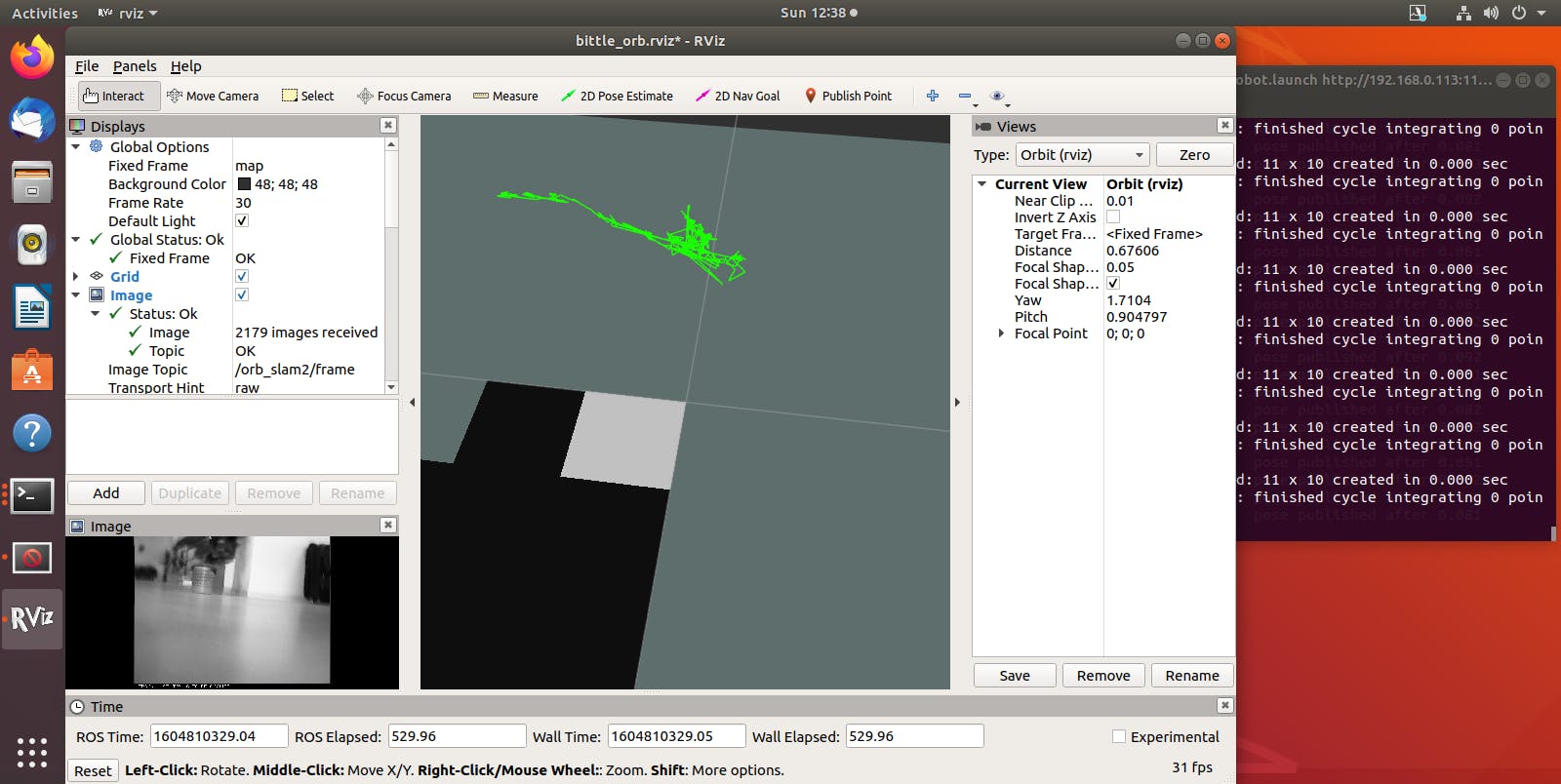
不幸的是,我發現由于 Bittle 上的相機在轉動過程中移動得太快,它往往會丟失關鍵點,需要返回到之前的位置。
可以在這里進行一些改進以使其更穩定
- 使用立體相機
- 使用 ORB-SLAM3 可以集成 IMU 數據以實現更精確的定位
基于激光雷達的 SLAM 與 Hector SLAM
如果 Visual SLAM 對我們的機器人不起作用,那么安裝 LIDAR 并嘗試一種基于激光掃描儀的算法怎么樣?這里的好消息是,對于 LIDAR,我們不需要那么快的處理速度,因此即使是較舊的 Raspberry Pi 3 也可以。壞消息是,即使是小型激光雷達也很大,我可以使用的 RPLIDAR A1M8 重 190 克,當安裝在這個有腿機器人的頂部時,它會嚴重干擾其重心并影響行走步態。

在腹部下方增加了一些額外的重量以平衡事物之后,它可以爬行和行走,盡管我仍然試圖小心并避免突然停止。
Hector SLAM的軟件安裝在 Ubuntu 18.04 上輕而易舉。如果您還沒有安裝 ROS Desktop,請使用以下命令進行安裝(與上面關于 Visual SLAM 的第一部分相同):
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-melodic-desktop
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt-get install ros-melodic-hector-slam
創建 catkin 工作區,安裝catkin構建工具并將 RPLIDAR 存儲庫和 Bittle 驅動程序存儲庫克隆到 catkin_ws/src 文件夾
mkdir -p catkin_ws/src && cd catkin_ws/src
git clone https://github.com/Slamtec/rplidar_ros.git
git clone https://github.com/AIWintermuteAI/bittle_ROS
cd bittle_ROS && git checkout slam
構建 Bittle 驅動程序包并獲取你的 catkin 工作空間
catkin build
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
由于 Bittle 驅動程序是用 Python 3 編寫的,而 ROS 默認仍使用 Python 2.7,因此我們需要為 Python 3 安裝 rospkg 以使它們一起運行。
pip3 install rospkg
安裝完所有這些后,將 ROS 配置為在多臺機器上工作。然后運行
roslaunch bittle_driver bittle_lslam_robot.launch
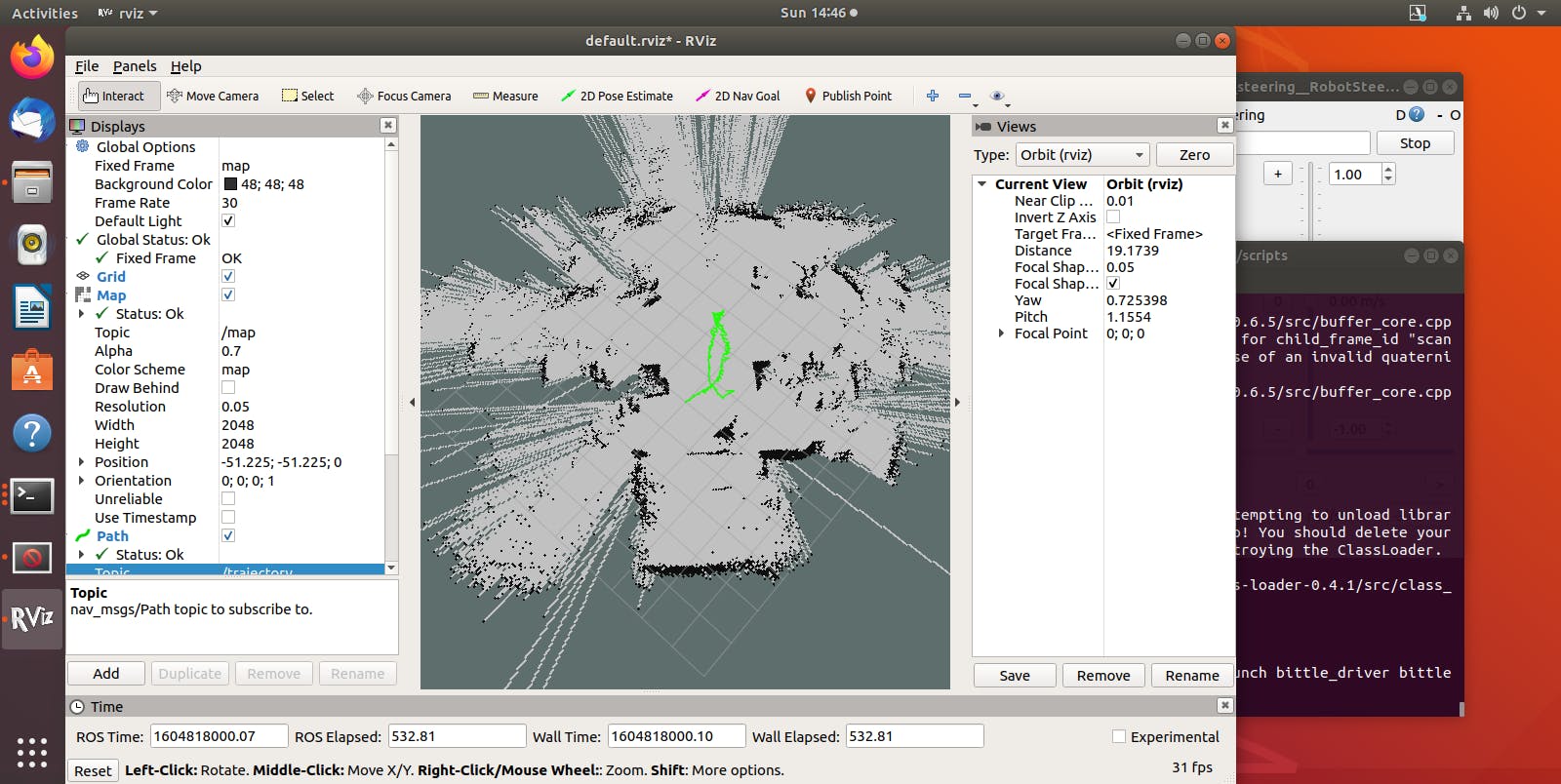
啟動 LIDAR、機器人控制和 hector SLAM 節點。總體映射結果看起來比 ORB-SLAM2 好得多,Hector SLAM 甚至可以發布里程計和路徑消息,這為使用 ROS 導航堆棧運行自主導航開辟了道路。
對于在 Bittle 上使用 LIDAR 時的改進,
- IMU數據也可以集成
- 步態和平衡算法可以調整以適應機器人頂部的額外重量
- 可以使用更緊湊的激光雷達
這是關于來自 Petoi 的機器狗 Bittle 的系列文章的最后一篇。Kickstarter 活動已經結束,因此,如果您想購買 Bittle,請繼續關注 Seeed 工作室子公司 TinkerGen 的預購公告,該公司將在其在線商店和亞馬遜上銷售 Bittle。
玩得開心建造機器人!
- Raspberry Pi 4上帶Respeaker的離線語音識別
- 使用ROS和Raspberry Pi進行Bittle遠程操作
- Raspberry Pi 4機械開關和OLED屏幕護罩
- 使用Raspberry Pi 4和RFID模塊的考勤系統
- 使用Raspberry Pi4控制直流電機
- Raspberry Pi 4機械開關和OLED屏幕護罩開源
- 適用于Raspberry Pi 3/4的Jamma街機板
- 適用于Raspberry Pi 4的Raspberry Pi Pico開發板
- 可視頻直播的Raspberry Pi網絡控制機器人 14次下載
- 樹莓派Raspberry Pi 4 Model B的電路原理圖免費下載 427次下載
- 《愛上Raspberry Pi》中譯版-電子書籍.pdf 0次下載
- Instant Raspberry Pi Gaming 6次下載
- Raspberry_Pi詳解 16次下載
- raspberry_pi各版本差別 0次下載
- Getting Started with Raspberry Pi 0次下載
- 基于Raspberry Pi 5的蜂窩物聯網項目 1312次閱讀
- 使用Raspberry Pi Pico W和MicroPython開發物聯網應用 2180次閱讀
- 用于測試項目的4個最佳樹莓派Raspberry Pi模擬器 6823次閱讀
- 如何通過Raspberry Pi設置CE電流監視器 2342次閱讀
- 基于樹莓派產品 Raspberry Pi微控制器板的優缺點 2984次閱讀
- 基于Raspberry Pi Pico開發先進的家庭自動化系統 3004次閱讀
- 基于FONA通過UART與Raspberry Pi進行通訊的方案介紹 2257次閱讀
- 微雪電子ZeroW| Raspberry Pi ZeroW主板簡介 2618次閱讀
- 微雪電子Raspberry Pi 3 Model主板簡介 3145次閱讀
- 微雪電子Raspberry Pi 3 Model擴展板簡介 1667次閱讀
- 微雪電子樹莓派4代B|Raspberry Pi主板介紹 6488次閱讀
- 利用Raspberry Pi構建存儲和虛擬化時間序列數據 952次閱讀
- 一文了解Raspberry Pi 4各項性能跑分 3w次閱讀
- ROS程序是如何控制伺服機的 所有答案盡在本文 3148次閱讀
- 視覺享受!用Raspberry Pi實現圣誕樹燈光秀 8344次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 2錦銳科技CA51F2 SDK開發包
- 24.06 MB | 29次下載 | 1 積分
- 3錦銳CA51F005 SDK開發包
- 19.47 MB | 3次下載 | 1 積分
- 4蘋果iphone 11電路原理圖
- 4.98 MB | 3次下載 | 2 積分
- 5基礎模擬電子電路
- 3.80 MB | 3次下載 | 1 積分
- 6RA-Eco-RA6M4-100PIN-V1.0開發板資料
- 34.89 MB | 1次下載 | 免費
- 7STM32F3系列、STM32F4系列、STM32L4系列和STM32L4+系列Cortex-M4編程手冊
- 3.32 MB | 1次下載 | 免費
- 8聯想A820t手機維修圖紙包括主板原理圖 尾板原理圖 點位圖
- 0.62 MB | 次下載 | 5 積分
本月
- 1AI智能眼鏡產業鏈分析
- 4.43 MB | 383次下載 | 免費
- 2蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 296次下載 | 5 積分
- 3貼片三極管上的印字與真實名稱的對照表詳細說明
- 0.50 MB | 94次下載 | 1 積分
- 4長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 91次下載 | 5 積分
- 5涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 6錦銳科技CA51F2 SDK開發包
- 24.06 MB | 29次下載 | 1 積分
- 7AO4803A雙P通道增強型場效應晶體管的數據手冊
- 0.11 MB | 28次下載 | 2 積分
- 8長虹液晶彩電LS29機芯的技術資料說明
- 3.42 MB | 16次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191388次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論