 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
演示
?
怎么運行的
該項目由兩部分組成。Arduino 端處理所有伺服運動并從激光雷達傳感器獲取測量讀數。Java 端將球形點轉換為笛卡爾點并將它們呈現為 3D。它們通過串行端口相互通信。用戶可以使用類似游戲的 fps 控件在場景中移動以獲得更好的體驗。
數學
項目中有兩個舵機。一個將用作平移 (Phi) 角,另一個用作傾斜 (Theta) 角。我們從激光雷達傳感器獲得的讀數將成為半徑。這意味著設備本身將位于點 (0,0,0)。從 Arduino 發送到 Java 程序的每個數據集都由這三個數字(半徑、phi、theta)組成,前導零以保持一致性。
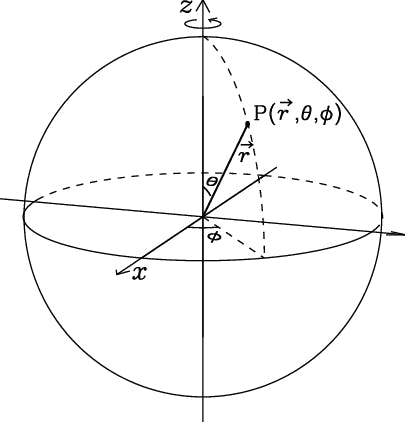
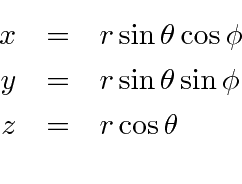
從這里我們必須將這些球面點轉換為 Cartesian(x, y, z) 以便我們可以在我們的 Java 程序中正確地繪制它們。
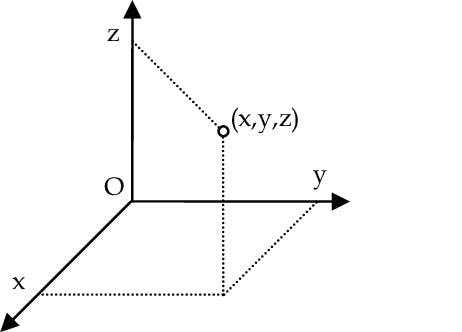
我們可以使用這些公式實現這些轉換。
注意:如果您查看 Java 代碼并注意到 x、y 和 z 的某些值被交換,有時甚至設置為負數,那是因為計算機坐標系也不同。例如,在計算機坐標系中,x 是水平的,而不是 y。Y positive 下降,而不是上升。像這樣的東西。對公式所做的這些修改只是為了讓 Java 在正確的位置呈現點。
串口通訊
我用 Arduino Uno 開始了這個項目,但遇到了串行端口與伺服系統沖突的問題。他們不能同時工作。當數據來回發送時,舵機會不斷抖動。從研究中我了解到這是使用 SoftwareSerial 的常見問題。我找到了一些解決這個問題的方法,但它們太麻煩了,甚至對我來說都沒有完全奏效。我決定改用 Arduino Mega,它解決了抖動問題。這是因為 Mega 有多個串口。
溝通的步驟
- Java開啟端口并監聽數據
- Arduino 進行第一次測量,將伺服系統移動到下一個位置并等待來自 Java 的“Okay”信號
- Arduino 以這種格式將數據發送到 Java 000,000,000
- Java等待所有的數據分片達到一定量就可以轉換
- Java 轉換這些數字,繪制點,并向 Arduino 發送一個字符作為“Okay”信號
- 一旦 Arduino 接收到信號,它就會在新的角度位置重復之前的操作
Java 必須等待的原因是因為即使您告訴 Arduino 發送 9 位數字和 2 個逗號,通過串行發送數據也不能那樣工作。只要有可能,它就會發送它想要的任何數據片段。所以我們希望 Java 直到接收到的所有數據看起來都像它可以識別的東西。
我使用 USB 電纜作為串行連接,但我相信如果需要無線,也可以使用藍牙模塊。
為項目提供動力
我用一塊 5v 的墻磚來運行伺服系統,因為我只是討厭處理電池并盡可能避免使用它們。激光雷達傳感器通過 Arduino 5V 供電。當然,Arduino 使用用作串行端口的相同 USB 電纜供電。
請隨時發表有關該項目的評論或問題。謝謝!
- 使用邏輯和轉換優化機械掃描激光雷達
- 車規級振蕩器為激光雷達提供解決方案
- 使用BLDC電機助力機械掃描激光雷達實現360度視場
- 【虹科】HKCubeRange1激光雷達產品規格_中文簡體
- 【虹科】HKCube1激光雷達產品規格_中文簡體
- 【虹科】HKCube激光雷達介紹_中文簡體
- 自制激光雷達設計
- 激光雷達技術及其發展動向.pdf 145次下載
- 基于單線激光雷達的數字重構系統綜述 75次下載
- 基于拉曼激光雷達的大氣水汽監測系統 27次下載
- 激光雷達產品選擇指南
- 小米2D激光雷達拆解資源下載 0次下載
- 激光雷達原理的PDF電子書免費下載 272次下載
- 小米的2D激光雷達拆解圖和講解 117次下載
- 激光雷達的優劣勢與無人駕駛汽車和家用機器人上的激光雷達的區別介紹 56次下載
- 激光雷達的工作原理和分類 758次閱讀
- 激光雷達LIDAR基本工作原理 5322次閱讀
- 什么是激光雷達?激光雷達的構成與分類 1w次閱讀
- 晶振在激光雷達系統中的作用 690次閱讀
- TOF激光雷達的類別 1709次閱讀
- 淺談激光雷達的盲區 4326次閱讀
- 基于STM32開發板和思嵐A1M8激光雷達制作地圖掃描儀 1w次閱讀
- 激光雷達的7大分類 8247次閱讀
- 關于FMCW激光雷達核心技術及量產難點 1w次閱讀
- 淺析自動駕駛基礎之激光雷達 4895次閱讀
- XenomatiX激光雷達技術推動自動駕駛革命 4830次閱讀
- 激光雷達和毫米波雷達的區別介紹 4.3w次閱讀
- Cortex-A53嵌入式處理器平臺上實現激光雷達SLAM的方法 9628次閱讀
- 激光雷達技術 1.1w次閱讀
- 昂貴的價格仍是車載激光雷達最大的發展障礙 2574次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論