 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
介紹
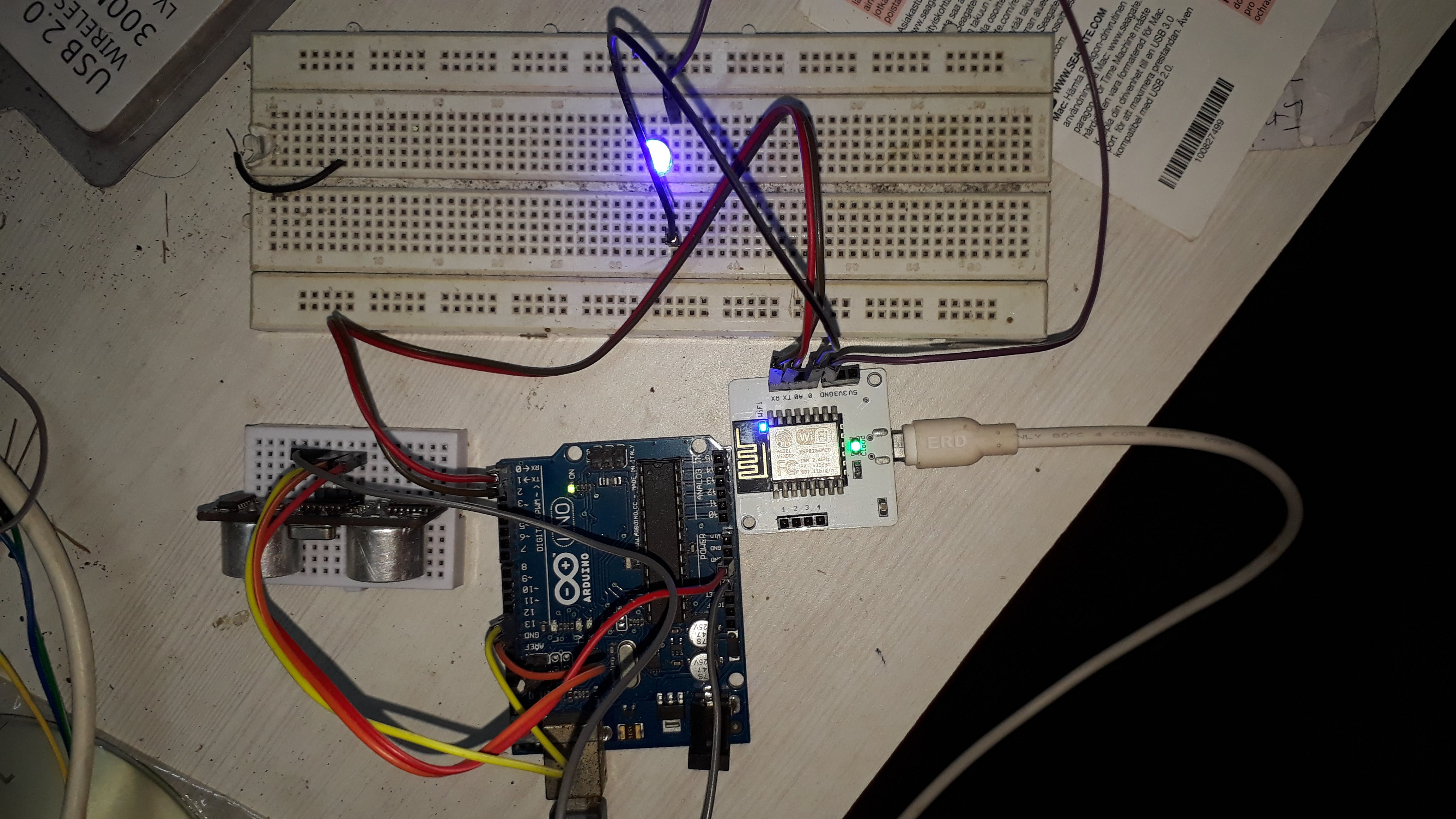
在這個項目中,我專注于某些事情,即從超聲波傳感器接收數據并計算從設備到人的實際距離,這些數據將通過 Arduino 上的 Tx 引腳傳遞到 BOLT IOT 設備的 Rx 引腳。當數據將從 Arduino 接收時,一個 python 腳本將運行一些邏輯,即如果距離低于范圍,則 LED 將發光(作為指示器),如果距離高于范圍,則 LED 將關閉并旁邊邊
LED 狀態(0 或 1)和語句“小于 20cm”或“大于 20cm”和連接的設備名稱將被插入數據庫。稍后將運行另一個 python 腳本以使用 shell 接口或從電報開始檢索數據。電報機器人將從數據庫接收數據并通過命令控制傳感器的電報操作。
服務器處理
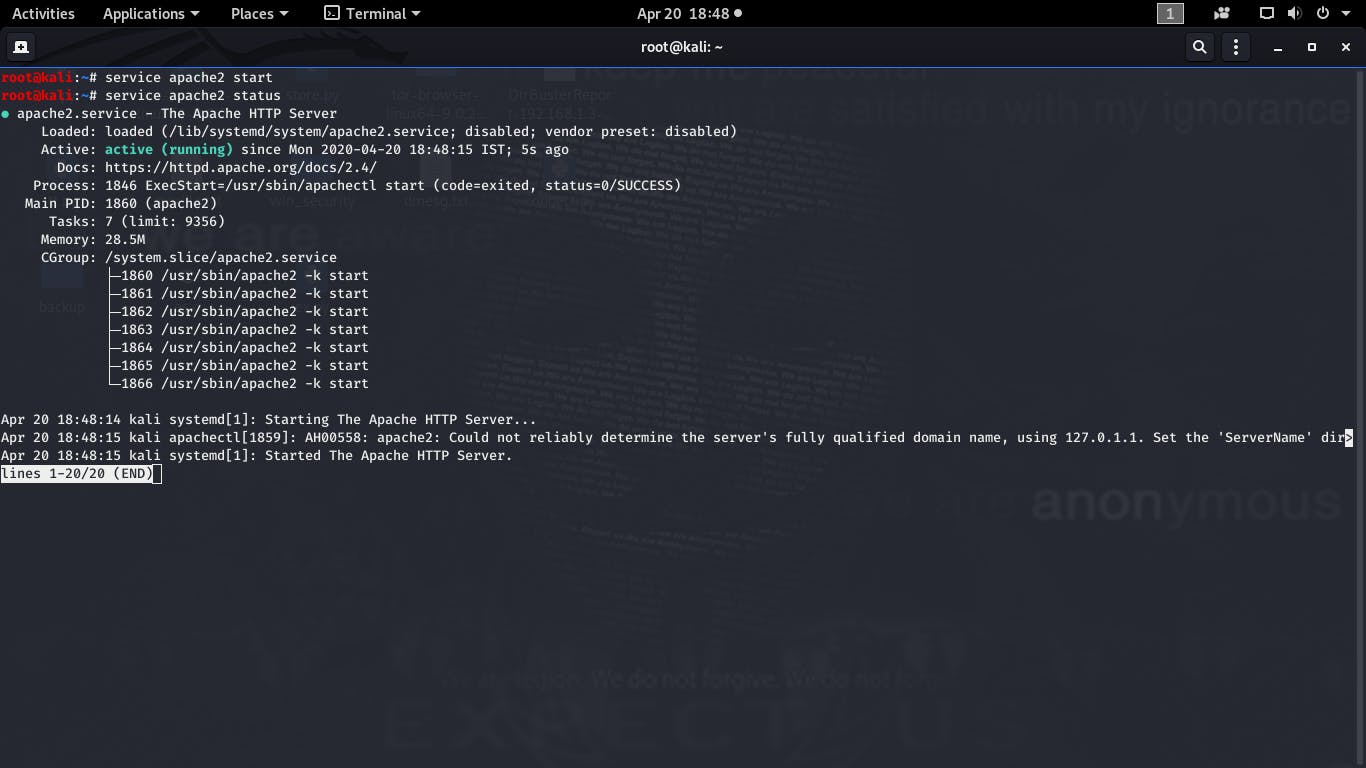
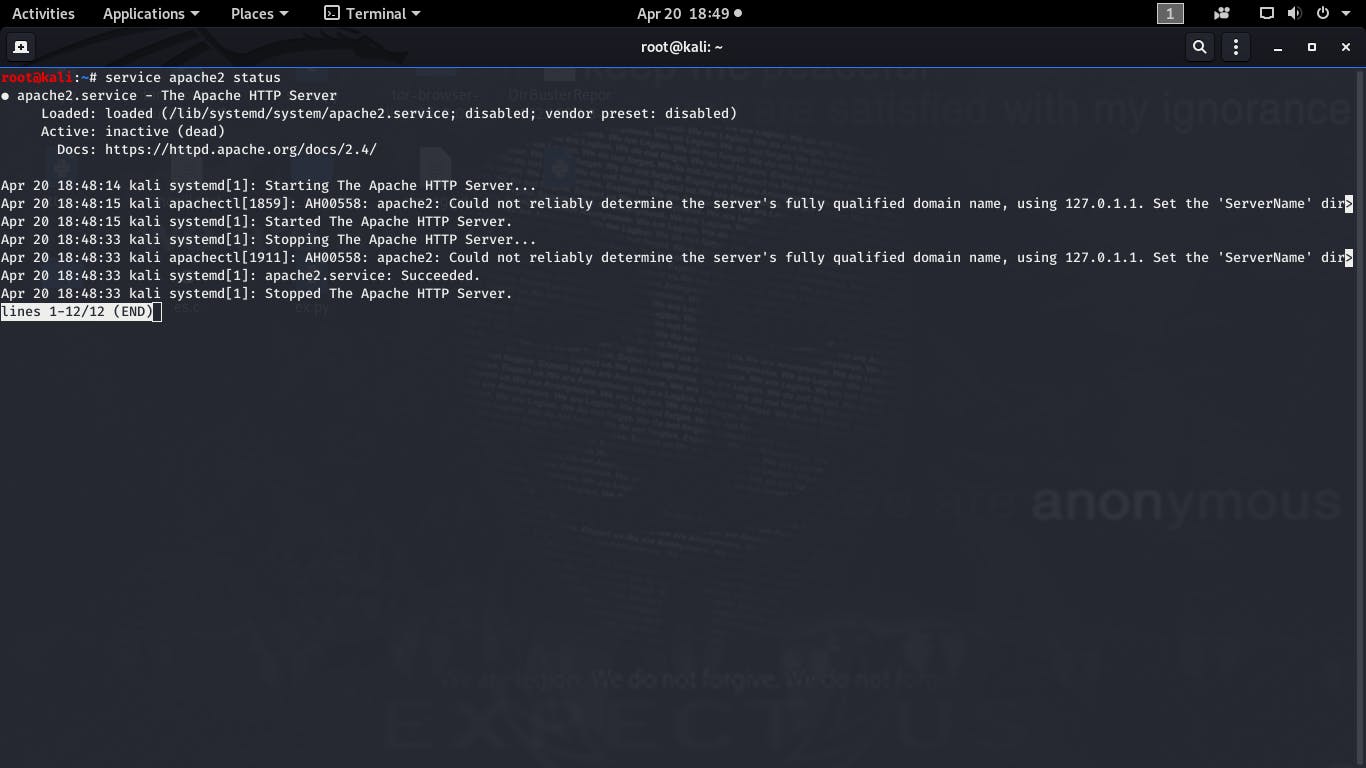
1.在我的項目中,我們需要從終端啟用apache2服務器
命令是——
service apache2 start
要查看服務器狀態 –
service apache2 status
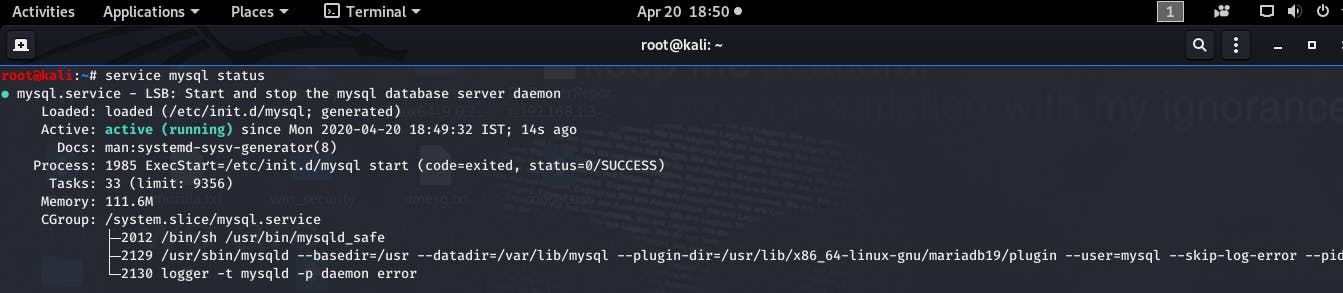
啟動 MySQL
命令是——
service mysql start
了解狀態
命令是——
service mysql status
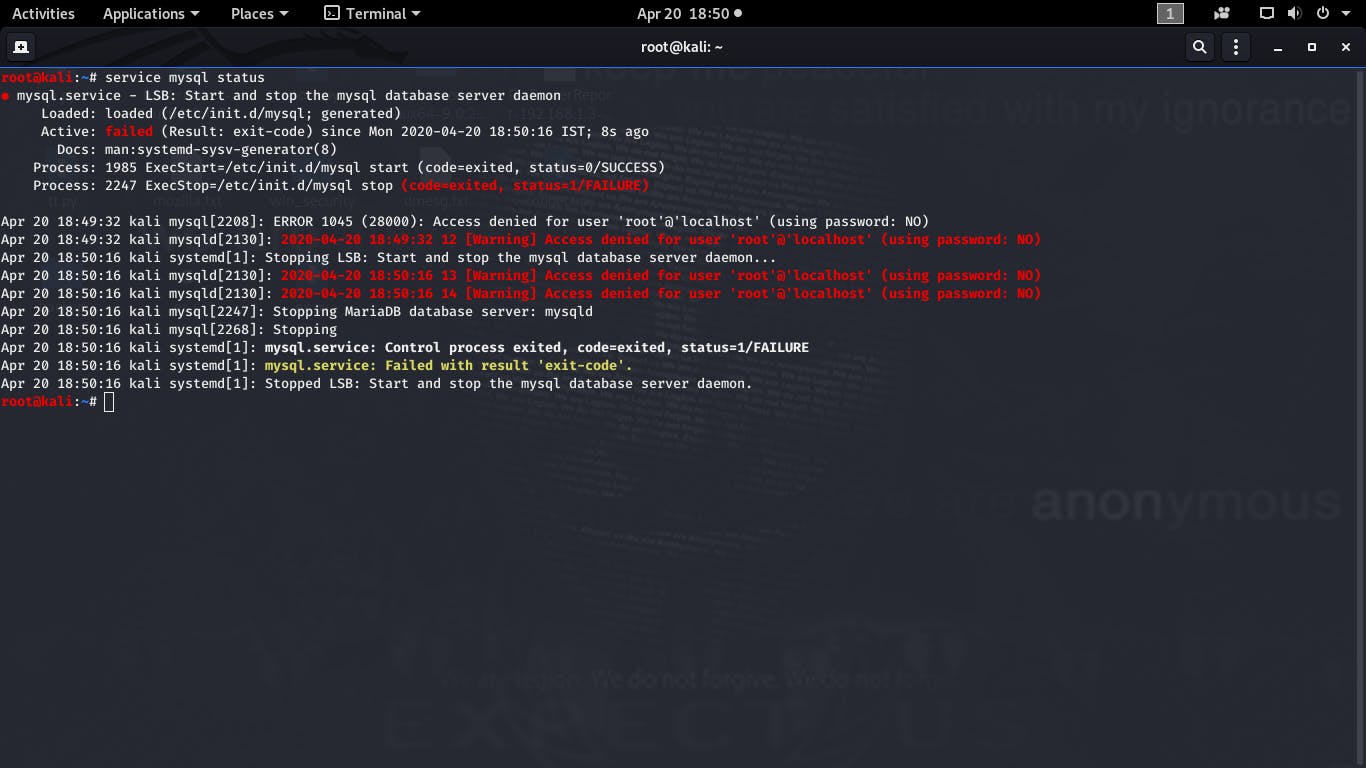
停止 MySQL
命令是——
service mysql stop
了解狀態
命令是——
service mysql status
停止 apache 服務器
命令是——
service apache2 stop
了解狀態
命令是——
service apache2 status
下一步
轉到 Google 或 Firefox 瀏覽器并在地址欄中輸入
localhost/phpmyadmin
并按 Enter。
我們將看到這個 phpmyadmin 的儀表板
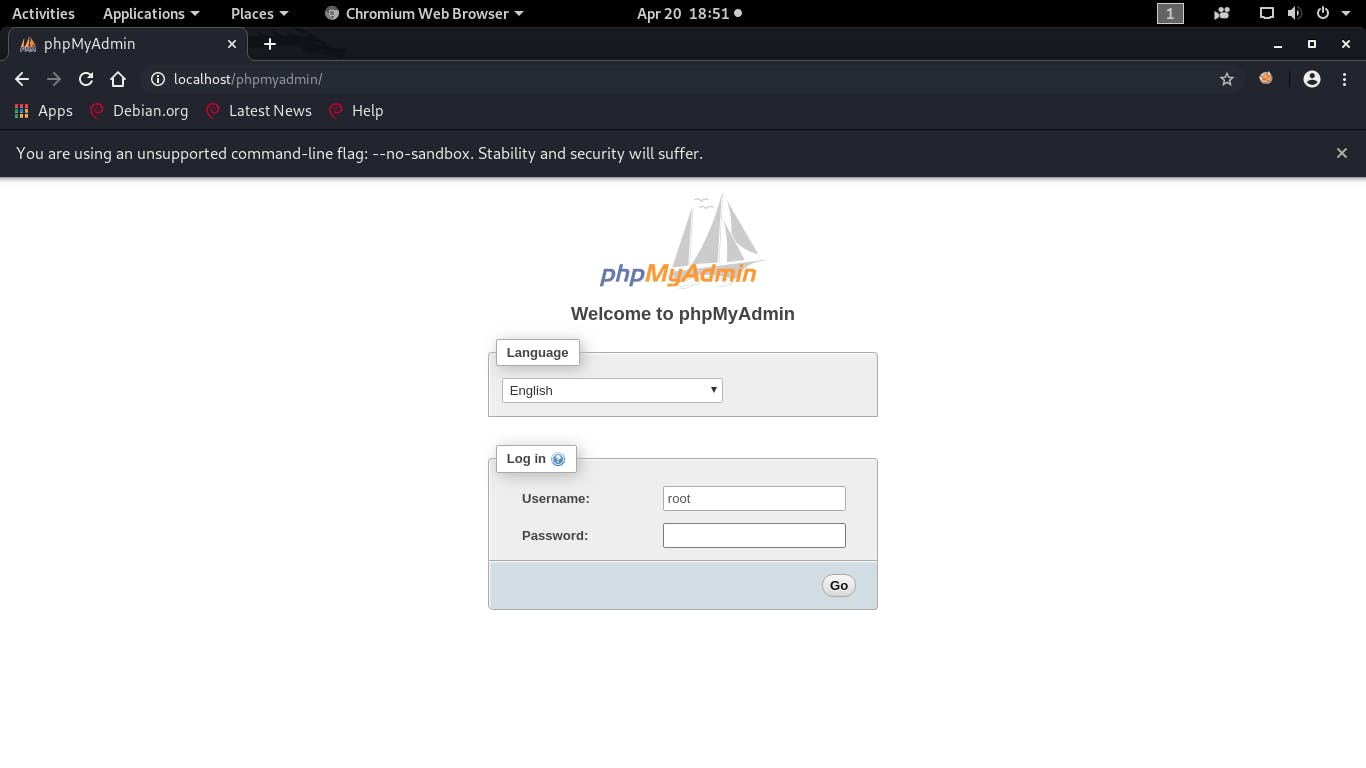
然后我創建一個數據庫名稱“ sensor ”和表名稱“分析”
列數 – 3
從傳感器檢索數據
對于距離計算,我們使用超聲波傳感器。在這個傳感器中,有 4 個引腳可用(Vcc、TRIG、ECHO、GND )。一個是發射器,另一個是接收器。

接收來自超聲波傳感器的信號并通過一些簡單的計算將其轉換為厘米級。
計算
距離(cm)=持續時間 * 0.0340 / 2
在編碼部分
#include
#include
使用了兩個頭文件
- 我下載這兩個頭文件并將其粘貼到/Arduino/Libraries/boltiot-arduino-helper/ <我的頭文件>。
- · 編輯 BoltDeviceCredentials.h 文件并設置我正確的 Bolt API 和設備名稱。
- Boltiothelper.h 和 boltcredential.h 的鏈接轉到 src 文件夾
在 Arduino 編碼中,我們將看到這部分
boltiot.begin(Serial);
(用于通過串行 UART 初始化 Bolt 接口)
最后,我們將 Bolt 的 Tx 引腳連接到 Arduino Serial Port 的 Rx 引腳,并將 Bolt 的 Rx 引腳連接到 ardArduinoduino Serial Port 的 Tx 引腳。
UltraSonic 傳感器的 Trig 引腳用于觸發信號,Echo引腳用于接收Trigg引腳發送的回波信號。
·在python腳本中我們使用
mybolt = Bolt(conf.bolt_api_key, conf.device_id)
reponse=mybolt.serialRead(“1”)
- 在第二行代碼中,“1”是 Arduino 的 Tx 引腳的引腳號,然后使用 JSON 和 rstrip 檢索該值。
- 最重要的是,Arduino 的所有代碼都已連接,python 腳本我使用 5 秒的延遲來同步代碼并避免超出我的 API 限制進行調試。
- · LED 與引腳號為 0 的 BOLT IOT 設備連接。
將數據發送到數據庫
在 python 腳本中,導入 mysql.connector 模塊對于任何與數據庫相關的任務都是必須的,然后我們使用
mydb=mysql.connector.connect(host="localhost",user="root",passwd="***",database="sensor")
- 如果距離小于 20 厘米
mySql_insert_query = """INSERT INTO analysis (Distance_at_cm, LED_status, Connected_device) VALUES ('Less than 20 cm','1','BOLT_IOT & ARDUINO') """
- 如果距離大于 20 厘米
mySql_insert_query = """INSERT INTO analysis (Distance_at_cm, LED_status, Connected_device) VALUES ('greater than 20 cm','0','BOLT_IOT & ARDUINO') """
- 最后提交。
從數據庫接收數據
在這個項目中,我使用兩個選項
- 從終端
- 來自電報
從終端,我們使用這些選項
用于創建數據庫
用于創建表
用于查看表數據
對于刪除數據庫
為了顯示,數據庫列表
對于下拉表
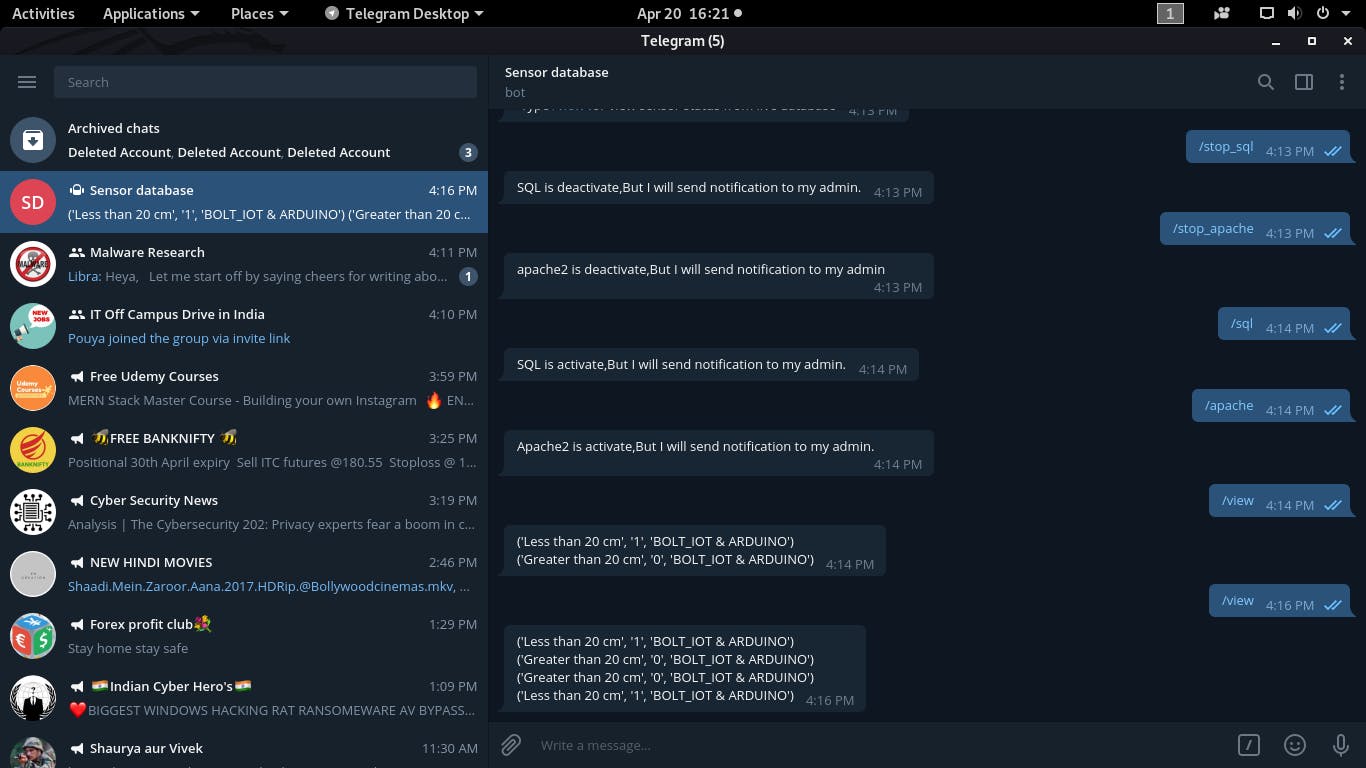
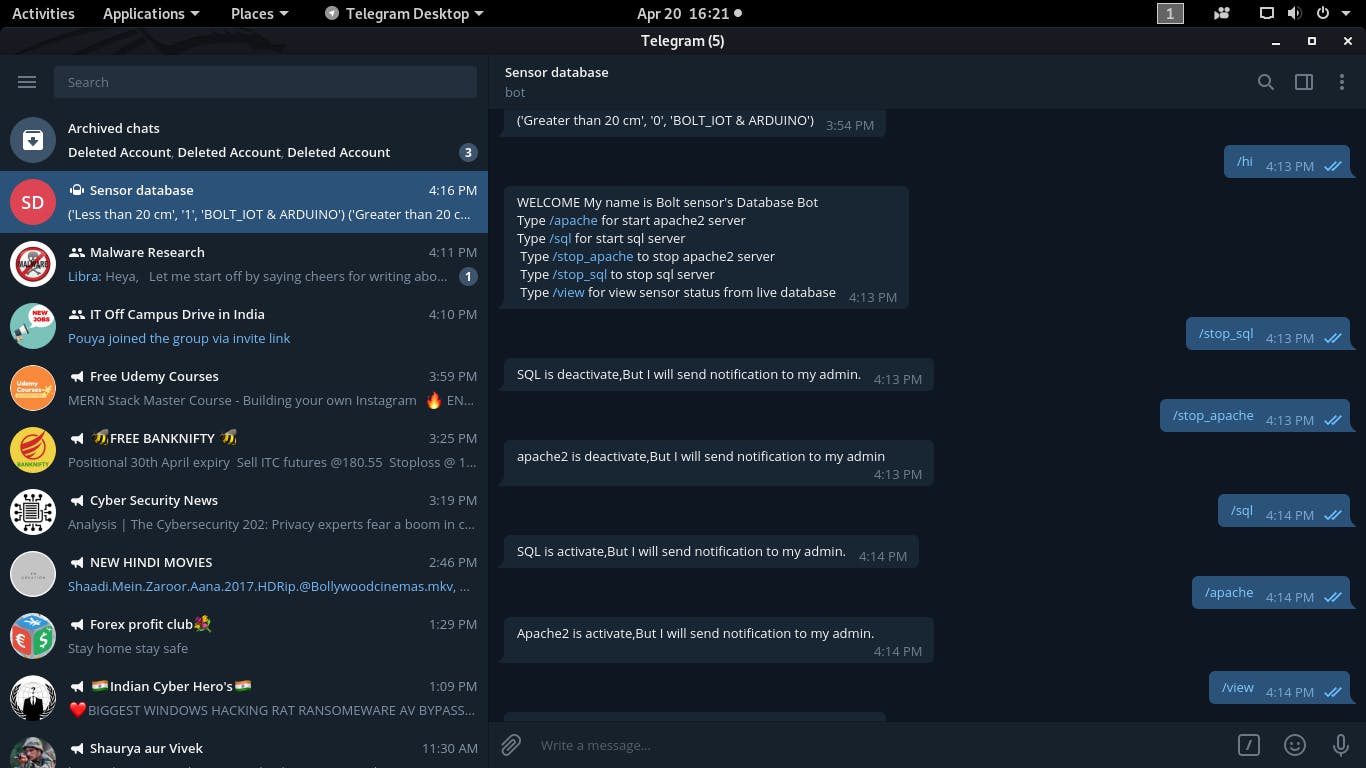
從電報中,我們使用我的 BOT 令牌并從以下列表中創建一個接口
用于啟動 apache 服務器
用于啟動 SQL 服務器
查看我的傳感器的表格數據
用于停用 apache 服務器
用于停用 SQL 服務器
從 Telegram Bot 接收命令
以下步驟激活 Telegram Bot
- 在來自網絡的電報或來自 Play 商店的應用程序中創建一個帳戶。
- 搜索“botfather”。
- 輸入 /newbot 并回車
- 為 BOT 選擇一個合適的名稱并以 bot 結尾(例如 telebot、johnbot、harry_bot 等)并按 Enter。
這張圖顯示了如何使用 botfather 創建一個機器人
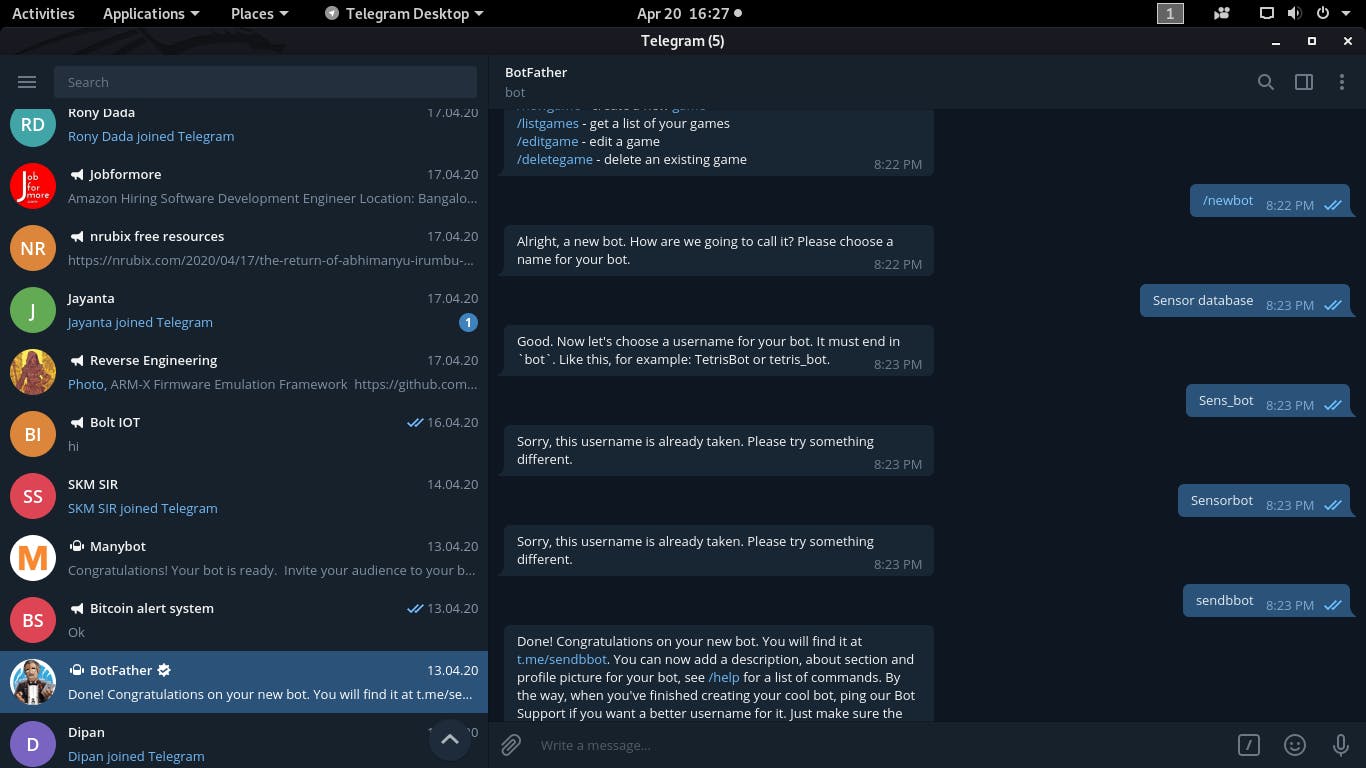
。點擊
Python 代碼可在下面我的 Github 帳戶中找到
- 從傳感器收集的數據來分析心臟狀況
- 從NXP設備收集傳感器數據
- 基于STM32的485傳感器數據收集
- 多旋翼飛行器設計與控制的傳感器標定和測量 0次下載
- 汽車傳感器檢測數據手冊 33次下載
- 基于DSP的永磁同步電機無傳感器控制綜述 7次下載
- 基于DSO的無刷直流電機無位置傳感器控制原理 7次下載
- 智能壓力傳感器的特點和功能詳細介紹 0次下載
- 如何使用dsPIC30F2010數字信號控制器控制無傳感器的BLDC電機
- 基于二分法與移動Sink的無線傳感器網絡數據收集協議 0次下載
- 無線傳感器網絡數據收集協議測試用例生成 0次下載
- 基于RFID的傳感器網絡合作式充電和數據收集策略 0次下載
- 基于無線傳感器的能量收集新應用技術 10次下載
- 無線傳感器網絡的能量收集 5次下載
- 汽車巡航控制用傳感器進展
- 傳感器與控制器有什么區別 1409次閱讀
- 在實時控制系統中使用傳感器優化數據可靠性的3個技巧 479次閱讀
- 總結各種傳感器原理 1182次閱讀
- 如何從您喜愛的傳感器中獲取數據 1823次閱讀
- 智能傳感器:從大數據到人工智能智能數據 1466次閱讀
- 物聯網應用中使用最多的傳感器類型有哪些 6017次閱讀
- GSM調制解調器簡化傳感器網絡中的數據采集和處理 1400次閱讀
- 汽車電子控制系統中的各種傳感器技術解析 1.3w次閱讀
- 氣壓傳感器的工作原理_氣壓傳感器應用 2.4w次閱讀
- 基于無線傳感器超低功率能量收集器的供電系統設計 1713次閱讀
- 為什么需要凈化傳感器數據 700次閱讀
- 傳感器在運動控制系統中起到了核心的作用 5344次閱讀
- 發動機傳感器控制系統是整個汽車傳感器的核心 9298次閱讀
- 濕度傳感器好壞檢測_濕度傳感器的工作原理_濕度傳感器應用 2w次閱讀
- 什么是無線傳感器,無線傳感器的應用,無線傳感器的工作原理 2.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論