 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
該項目將展示如何實施完整的端到端圖像處理管道,以實施能夠以 30fps 的速度運行的邊緣檢測視覺算法,以檢測道路車道。
一、簡介
要實現(xiàn)實時車道檢測,我們的想法是拍攝圖像并將其傳遞給邊緣檢測器 IP。最著名的一種是 Sobel 邊緣檢測器。然而,Canny 邊緣檢測器具有可編程閾值的優(yōu)勢。即時修改閾值可以適應不同的光照條件。
https://en.wikipedia.org/wiki/Canny_edge_detector
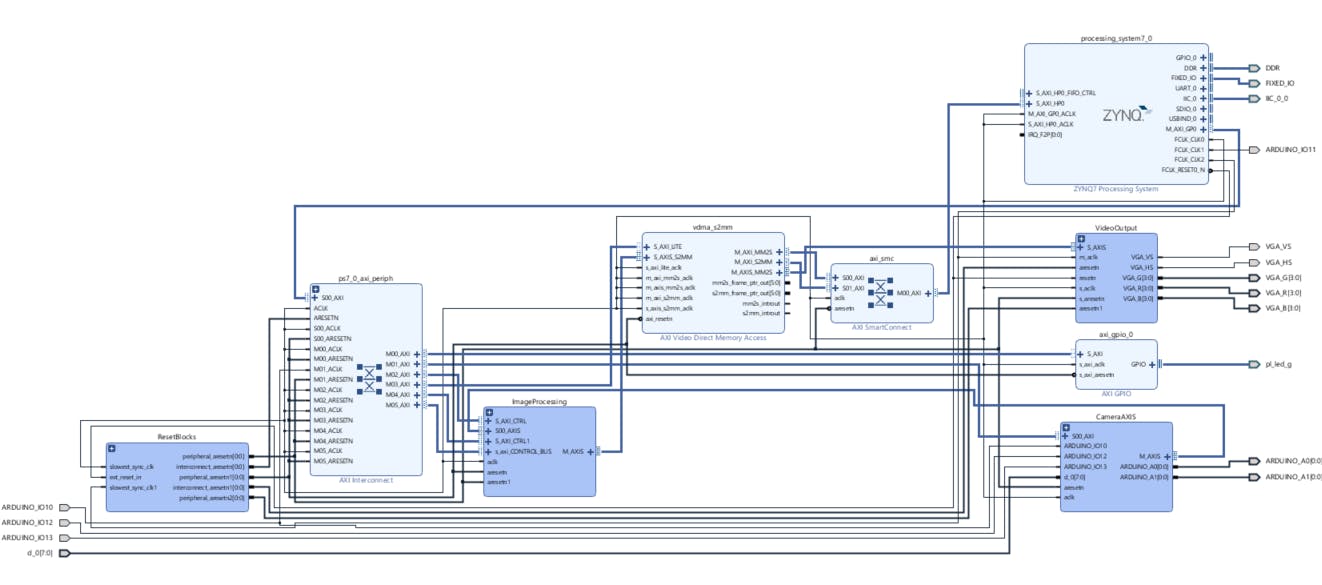
視覺處理流水線在邏輯上可以分為三個部分。圖像源、圖像處理管道和圖像接收器。
?
?
從高層次的角度來看,需要一個圖像源(可以是相機傳感器或圖像模式生成器)和一個接收器(可以是顯示器)。
2.硬件塊
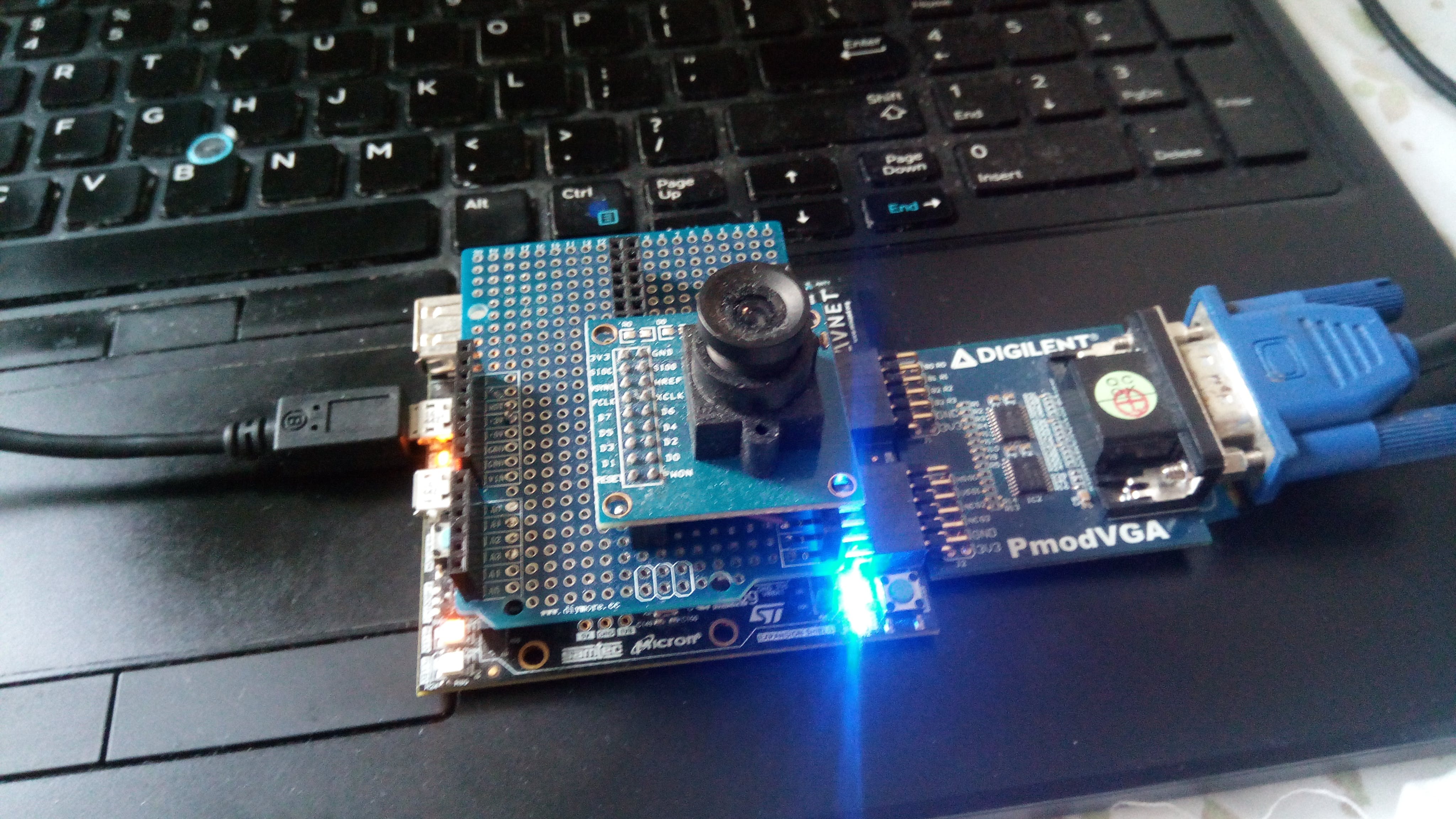
首先,必須將所有原型硬件部件放在一起。在這種情況下,系統(tǒng)硬件僅由五個組件組成。
a) MiniZed ZYNQ 開發(fā)板
b) OV7670 相機
c) Arduino 屏蔽穿孔板
d) 10pin 0.1inch 母頭
e) VGA PMOD
OV7670 相機安裝在一個 10 針 0.1 英寸母接頭上,該接頭本身焊接到原型板上。VGA PMOD 連接到 MiniZed 雙 PMOD 接頭連接器。最后一步是將 VGA 電纜連接到顯示器。
一旦硬件系統(tǒng)組裝在一起,下一步就是使用 Vivado 在 FPGA (PL) 上設計硬件。
3.FPGA硬件
1. 圖片來源
有許多相機接口,但最簡單的是使用并行總線的 CMOS 傳感器,例如古老的 OV7670 相機傳感器。然而,要使用這樣的傳感器,必須實現(xiàn)一個相機捕獲模塊,該模塊將從傳感器傳輸?shù)淖止?jié)流轉(zhuǎn)換為適當?shù)膮f(xié)議,在我們的例子中是 AXIS 總線。
此外,必須通過在 PL 中將配置模塊實現(xiàn)為從 BRAM 讀取配置的 I2C 模塊或在 PS 中將配置模塊實現(xiàn)為通用相機驅(qū)動程序來配置相機。PS 配置顯然更靈活,所以我選擇了這個選項。
?
?
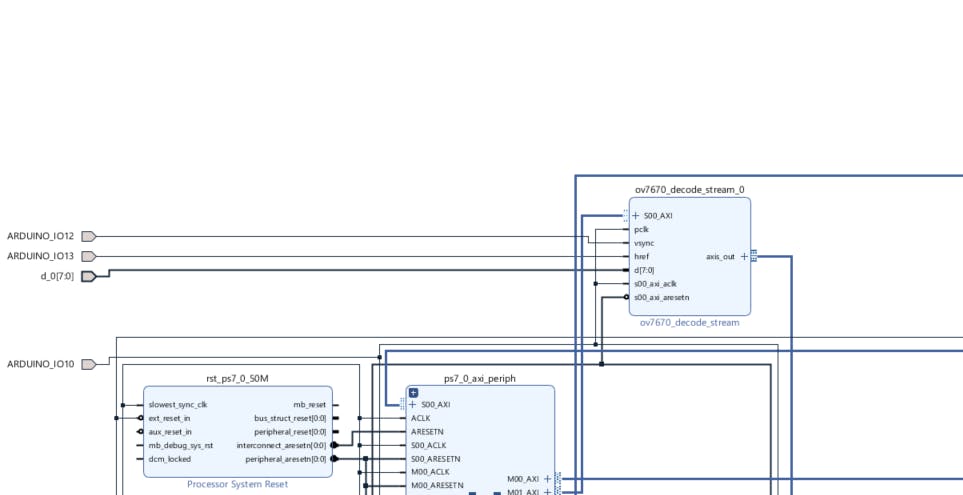
Vivado 設計中的圖像源是與 OV7690 CMOS 相機接口的定制 IP。相機使用并行八位接口。此外,還有兩個同步信號HSYNC和VSYNC,其選通模式分別表示行和幀。相機使用輸出像素時鐘 PCLK。像素速率與 PCLK 同步。OV7690 相機還需要一個 24 MHz (XCLK) 相機時鐘作為輸入。
OV7690 每個像素輸出 2 個字節(jié)。根據(jù)配置代碼,相機可以配置為使用不同的色彩空間。IP 配置為使用 RGB565 色彩空間。相機的控制是通過 AXI 接口完成的。攝像機 IP 在內(nèi)存中分配了一個位置。要啟動相機,必須設置位以啟用相機輸出數(shù)據(jù)。數(shù)據(jù)本身使用 AXIS (AXI Stream) 協(xié)議打包。
2. 跨時鐘域
來自相機的 AXIS 輸出被發(fā)送到異步 FIFO。這是需要跨越兩個不同時鐘域時使用的一種方法。
?
FIFO 的從端連接到 PCLK,而 FIFO 的主端連接到工作頻率為 50MHz 的 AXI 主時鐘域。主時鐘必須始終高于從時鐘,否則 FIFO 將溢出導致丟失像素。
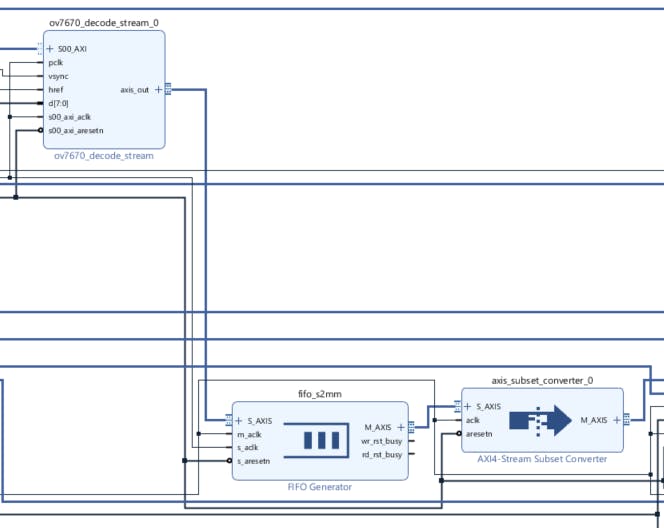
?
在像素流穿過時鐘域后,它通過子集轉(zhuǎn)換器發(fā)送。這是一個 AXIS IP 塊,可將 RGB565 數(shù)據(jù)重新映射為 24 位數(shù)據(jù)包。圖像處理 IP 使用 24 位,因為每種顏色都分配了 8 位。
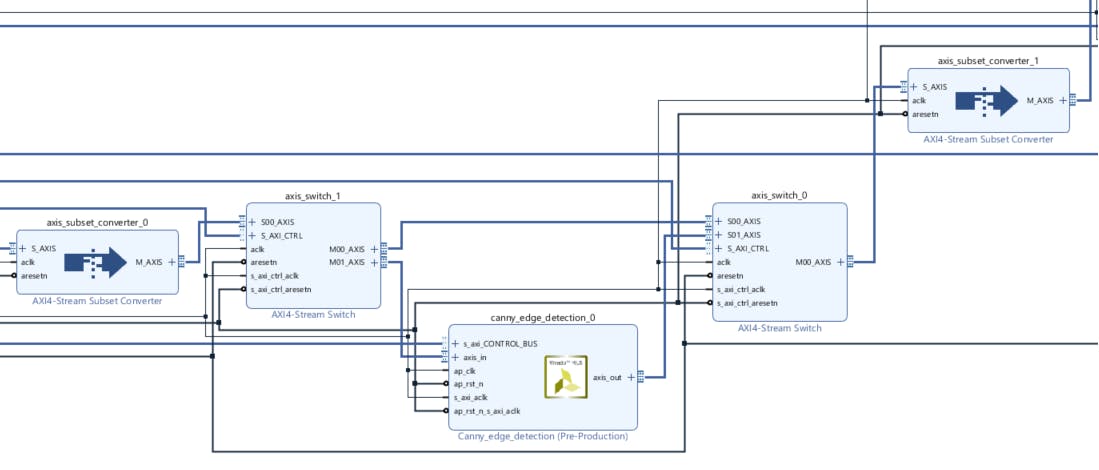
下一個元素是 AXIS 開關。該 IP 作為 AXIS 流的簡單多路復用器運行。它可以通過 AXI lite 接口或利用 AXIS 頻閃信號自動配置。在此特定應用中,啟用了 AXIS 開關的 AXI Lite 接口。然而,這需要實施 SDK 驅(qū)動程序來配置開關多路復用器。
3.圖像過濾
Canny 邊緣檢測器 IP 是使用 Vivado HLS 構(gòu)建的。它是用 C 語言編寫的。HLS 的主要優(yōu)點是允許快速部署 IP。缺點是生成的邏輯是模糊的,通常不如手工制作的 Verilog 代碼高效,盡管它可以接近它。在任何情況下,生成 Canny IP 都涉及使用 Vivado HLS 2013 和 2018.3 版本的 xfopencv。這是一組 C++ 庫,復制了用于 FPGA 邏輯的眾所周知的 OpenCV 庫。
Xilinx 最近發(fā)布了 Vivado 2019.1 以及 HLS 2019.1。這需要使用帶有非免費修訂框架的 SDSOC。
已實施的修訂代碼的主要更改是修改功能以支持 AXIS 協(xié)議的輸入和輸出。此外,AXI Lite 總線用于將所有可編程變量捆綁在一個集合中,并通過連接到 GP0 ZYNQ 總線的 AXI 互連將它們暴露給 PS 內(nèi)存映射。
?
?
最后,為了在兩個不同的 IP 之間切換,使用了 AXI 開關。
?
?
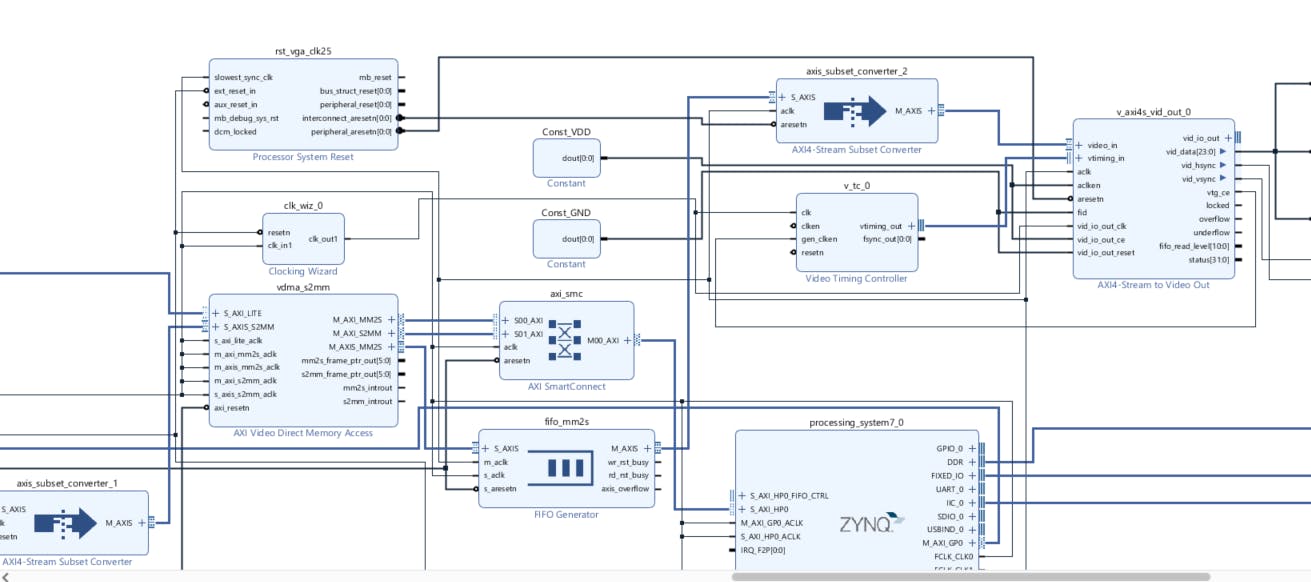
VDMA 配置為三重緩沖模式。VDMA 需要在運行前通過 AXI lite 接口進行配置,該接口將其連接到主 AXI 互連。
下面的代碼顯示了針對 VGA 分辨率的 VDMA 配置。
Xil_DCacheFlush();
Xil_ICacheInvalidate();
/* Start of VDMA Configuration */
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0x30, 0x8B);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0xAC, 0x10000000);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0xB0, 0x100F0000);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0xB4, 0x101E0000);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0xA8, WIDTH*2);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0xA4, WIDTH*2);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0xA0, HEIGHT);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0x00, 0x8B);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0x5C, 0x10000000);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0x60, 0x100F0000);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0x64, 0x101E0000);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0x58, WIDTH*2);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0x54, WIDTH*2);
Xil_Out32(XPAR_VDMA_S2MM_BASEADDR + 0x50, HEIGHT);
。。
VTC 本身配置為 VGA 分辨率。
?
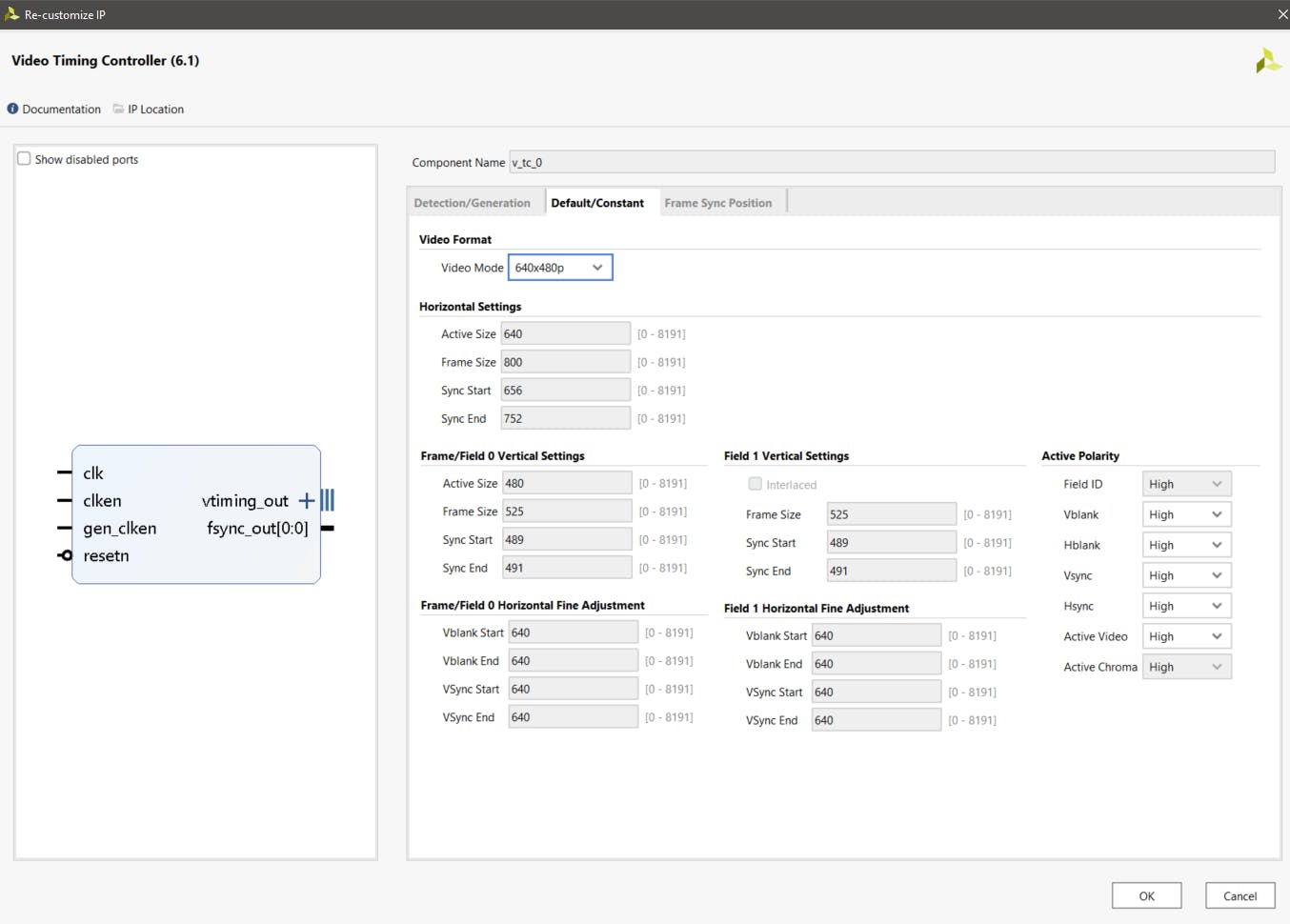
?
這基本上是一個 R2RDAC,它采用數(shù)字數(shù)據(jù)總線以及行和幀同步信號 HSYNCS 和 VSYNC,并將數(shù)據(jù)發(fā)送到監(jiān)視器。
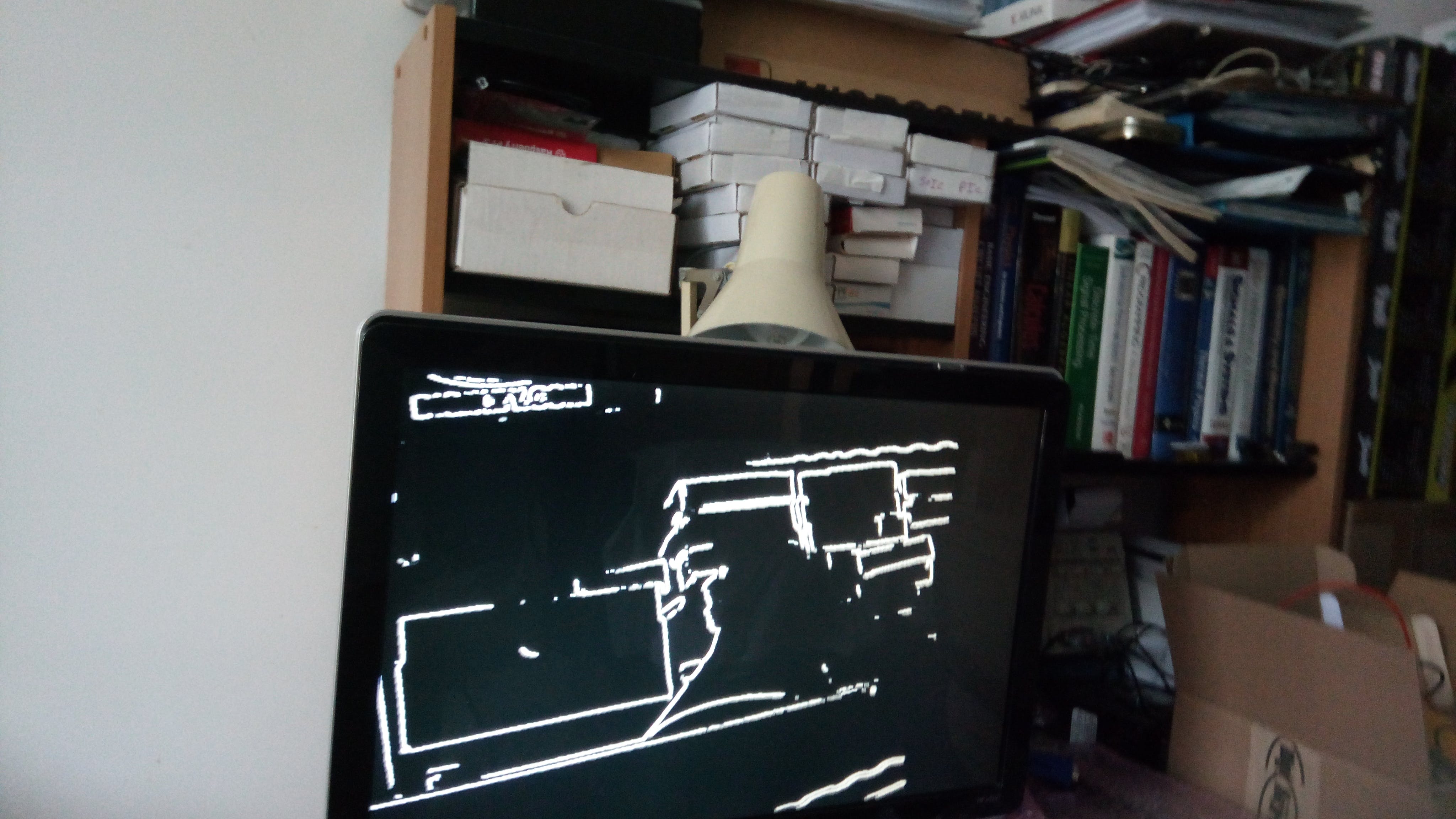
正如您在下面看到的,應用程序在正常 VGA 模式、灰色模式(看起來更像藍色)和邊緣檢測模式之間不斷切換。
?
概括
該項目展示了如何在 ZYNQ FPGA SoC 上實現(xiàn)完整的端到端視覺處理流水線。硬件能夠以 30 fps 的速度進行實時邊緣檢測。
其他想法包括:
- 添加更多濾波器類型,如中值、高斯、索貝爾、普維特等。
- 為 MiniZed 構(gòu)建一個 PYNQ 發(fā)行版以從 Linux 訪問 IP,以構(gòu)建一個無線 WiFi 攝像頭。
- 升級到更高清晰度的相機傳感器。
?
?
- 邊緣計算開源項目概述
- Helium/Lora相機開源分享
- 基于多尺度殘差網(wǎng)絡的邊緣檢測技術 3次下載
- 面向邊緣檢測的限制型自適應SUSAN算法 2次下載
- 如何使用DSP和FPGA實現(xiàn)相融合圖像處理技術的智能相機 14次下載
- sobel_FPGA l邊緣檢測 9次下載
- 數(shù)字圖像邊緣檢測的FPGA實現(xiàn) 18次下載
- 實時圖像邊緣檢測的設計及FPGA實現(xiàn) 39次下載
- 內(nèi)積能量與邊緣檢測 27次下載
- 基于改進的Laplacian算子圖像邊緣檢測 29次下載
- Prewitt圖像邊緣檢測及邊緣細化的FPGA實現(xiàn) 46次下載
- Laplacian圖像邊緣檢測器的FPGA實現(xiàn)
- 醫(yī)學圖像邊緣檢測算法的研究
- 基于形態(tài)梯度運算的遙感圖像邊緣檢測
- 基于形態(tài)灰度邊緣檢測算法的一種改進
- 關于FPGA的開源項目介紹 1523次閱讀
- 圖像處理算法——邊緣檢測 1248次閱讀
- Canny雙閾值邊緣檢測和弱邊緣連接詳解 2734次閱讀
- FPGA圖像處理之Canny邊緣檢測 1620次閱讀
- 如何進行圖像邊緣的檢測 1285次閱讀
- 優(yōu)秀的IC/FPGA開源項目:偽紅外圖像處理 2265次閱讀
- 關于邊緣檢測算子的實現(xiàn)原理 1477次閱讀
- 邊緣的超低功耗關鍵短語檢測 851次閱讀
- 利用FPGA構(gòu)建邊緣AI推理的解決方案 1203次閱讀
- SpinalHDL里如何實現(xiàn)Sobel邊緣檢測 1304次閱讀
- 基于FPGA實時圖像邊緣檢測系統(tǒng)的實現(xiàn) 2641次閱讀
- 明確圖像處理檢測任務選擇合適的工業(yè)相機 5215次閱讀
- 圖像處理邊緣檢測算子分類 7869次閱讀
- 以FPGA為核心控制單元的空間相機通信系統(tǒng)的設計詳解 1093次閱讀
- 基于LEON3開源軟核處理器的動態(tài)圖像邊緣檢測SoC設計 1160次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 2錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 29次下載 | 1 積分
- 3錦銳CA51F005 SDK開發(fā)包
- 19.47 MB | 3次下載 | 1 積分
- 4蘋果iphone 11電路原理圖
- 4.98 MB | 3次下載 | 2 積分
- 5基礎模擬電子電路
- 3.80 MB | 3次下載 | 1 積分
- 6RA-Eco-RA6M4-100PIN-V1.0開發(fā)板資料
- 34.89 MB | 1次下載 | 免費
- 7STM32F3系列、STM32F4系列、STM32L4系列和STM32L4+系列Cortex-M4編程手冊
- 3.32 MB | 1次下載 | 免費
- 8聯(lián)想A820t手機維修圖紙包括主板原理圖 尾板原理圖 點位圖
- 0.62 MB | 次下載 | 5 積分
本月
- 1AI智能眼鏡產(chǎn)業(yè)鏈分析
- 4.43 MB | 383次下載 | 免費
- 2蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 296次下載 | 5 積分
- 3貼片三極管上的印字與真實名稱的對照表詳細說明
- 0.50 MB | 94次下載 | 1 積分
- 4長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 91次下載 | 5 積分
- 5涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 76次下載 | 1 積分
- 6錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 29次下載 | 1 積分
- 7AO4803A雙P通道增強型場效應晶體管的數(shù)據(jù)手冊
- 0.11 MB | 28次下載 | 2 積分
- 8長虹液晶彩電LS29機芯的技術資料說明
- 3.42 MB | 16次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191388次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論