完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > tof
文章:429個 瀏覽:37122次 帖子:35個
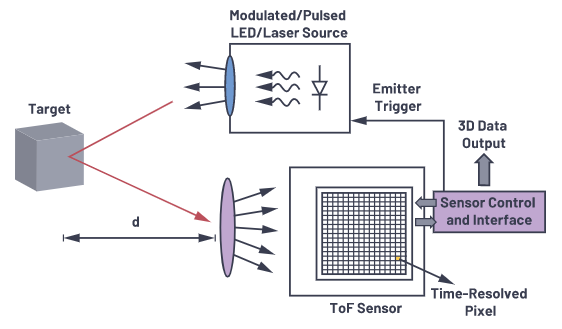
利用TOF技術成像的設備被稱為TOF相機(或TOF攝像頭), TOF相機與普通機器視覺成像過程也有類似之處,都是由光源、光學部件、傳感器(TOF芯片)、...

與實驗室測試條件不同的是,實際應用中,電池通常不會在充滿電后立即放電,而是在使用前(滿電狀態下)擱置一段時間。

激光雷達(LiDAR)是當前正在改變世界的傳感器,它廣泛應用于自動駕駛汽車、無人機、自主機器人、衛星、火箭等。激光通過測定傳感器發射器與目標物體之間的傳...
TOF成像可用于大視野、遠距離、低精度、低成 本的3D圖像采集。其特點是:檢測速度快、視野范 圍較大、工作距離遠、價格便宜,但精度低,易受環境光的干擾。
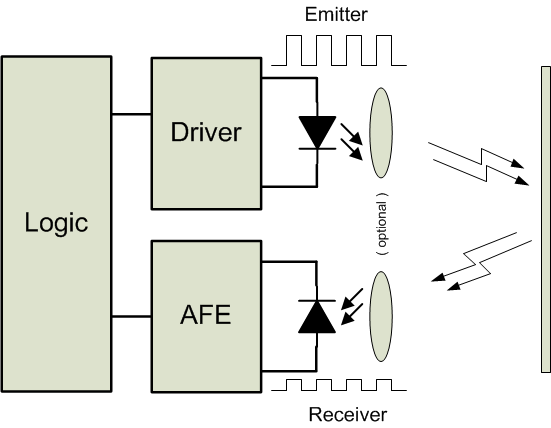
接近感應傳感器在我們的生活中發揮著重要的作用,在智能家居家電中廣泛存在,如自動感應出水的水龍頭,自動感應送風的空調,自動檢測并避開障礙物的掃地機及自動打...
據麥姆斯咨詢報道,近期,北京理工大學光電成像技術與系統教育部重點實驗室科研團隊在《紅外與激光工程》期刊上發表了以“Time-of-Flight透散射介質...
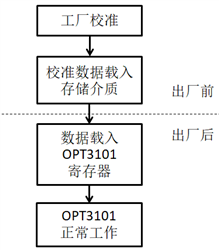
OPT3101與傳統紅外,超聲波等方案對比具體高精度,寬視角,以及對溫度,光照免疫等優勢,還可以在某些應用場景下避免專利問題(如掃地機器人避障功能)。同...
在經典的TOF測量方法中,探測器系統在發射光脈沖的同時啟動探測接收單元進行計時,當探測器接收到目標發出的光回波時,探測器直接存儲往返時間。
基于雷達的毫米波、超聲波以及基于生物電的肌電等手勢識別技術,在汽車艙內手勢識別功能中尚未被廣泛應用。與傳統的視覺手勢識別技術相比,這些技術仍然存在一些限...
隨著激光雷達的上車數量的不斷攀升,如何用好激光雷達成為了重中之重,而用好激光雷達的關鍵點之一就在于處理好點云數據。

手勢檢測系統為駕駛員提供了一種新體驗:揮一揮手即可控制車內溫度、照明、窗戶、信息娛樂系統等。目前有多種方法可以調整車內的各種舒適和便利功能,但是,操縱按...
固態電解質(SEs)結合高壓正極和鋰金屬負極有望實現高能量密度的固態電池(SSBs)。普遍認為界面穩定性對固態電池的電化學性能起著至關重要的作用。
timsTOF Pro質譜儀助力微量樣本進行4D蛋白質組學研究
蛋白質作為功能分子,在生命活動中起到非常關鍵的作用。蛋白質組學研究的最終目標是對整個組織或細胞蛋白質組進行全面的研究。
4D質譜技術深度解析小鼠蛋白質組在性別/年齡水平上的表達差異
研究者首先比較了兩種labelfree定量蛋白質組檢測策略,即DDA和DIA的檢測效果。
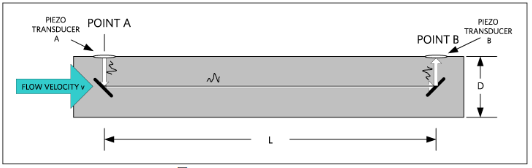
MAX35101為時間數字轉換器,內置放大器和比較器,旨在為超聲波熱量表和流量計市場提供完整的模擬前端(AFE)方案。該設備具有 20ps 的時間測量精...
問題可以描述為:將一個機器人放入未知環境中的未知位置,是否有辦法讓機器人一邊逐步描繪出此環境完全的地圖,同時一邊決定機器人應該往哪個方向行進。
視覺引導的室內搬運或者無人配送這種場景,有沒有合適的深度相機或雙目相機推薦?雙目相機的算力要求有多高啊?TOF和結構光相機適合這種場景嗎?

飛行時間(ToF)激光雷達面臨的一個更困難的挑戰是接收信號鏈所需的高靈敏度。通常,準直(平行光線)激光脈沖被發送到一個點。準直激光源的優點是它限制了發散...
光學器件在飛行時間(ToF)深度傳感相機中起著關鍵作用,光學設計決定了最終系統及其性能的復雜性和可行性。3D ToF相機具有某些獨特的特性1這推動了特殊...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

