為了更好解決主動安防、惡劣環境下安防應用,納雷科技正式發布AI長距安防雷達新產品——NSR300WVF。NSR300WVF是一款雷達視覺融合區域警戒系統,雷達在目標進入防區時進行探測預警,同時通過對目標的距離、角度和速度來判斷目標的準確位置,融合視頻進行目標復核,判斷是否為需報警的目標。
2018-07-27 17:37:06 10912
10912 對于MTI雷達而言,在不考慮盲速和頻閃的情況下,目標的徑向速度越大,其多普勒頻率就越高,越有利于檢測;目標的徑向速度越低,其多普勒頻率就越低,越不利于檢測。
2022-09-08 09:35:593548 激光雷達是以發射激光束探測目標的位置、速度等特征量的雷達。通過向目標發射探測信號(激光),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,從而獲得目標的距離、方位、速度等相關信息。
2022-10-12 09:50:071853 并測定它們的空間位置,因此雷達也被稱為“無線電定位”,是一種利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度
2021-09-01 15:41:15
和接收的時間差,可以測出目標的距離。同時用頻率過濾方法檢測目標的多普勒頻率譜線,濾除干擾雜波的譜線,可使雷達從強雜波中分辨出目標信號。所以脈沖多普勒雷達比普通雷達的抗雜波干擾能力強。根據波的傳播理論
2021-10-28 15:14:21
和運動速度;在使用多通道傳感器時,還可以從不同的視角觀察目標的運動。通過從不同的視角采集目標的運動狀態,并結合瞬時信息和歷史信息進行分析,從而實現對復雜運動的分辨。在下圖所示的例子中,當人的手臂做
2018-11-08 10:55:44
,用于預防老人摔倒。目前,我們的技術已經可以通過處理雷達數據,實現人體運動狀態和軌跡的解讀。手勢識別交互人機交互是雷達技術的另一個重要應用領域,如手勢識別交互。利用雷達采集的距離、多普勒信息,以及快速采樣
2018-11-08 10:41:54
測量目標的速度,以及從目標回波中獲取的更多有關目標的信息。所謂的雷達回波系統需要從接收到回波信號中提取、分析測量目標的相關信息。隨著數據采集、處理技術的迅猛發展,在現代雷達回波系統的應用過程中,高速
2016-07-01 11:47:58
的頻率和波長不同。其原理是雷達設備的發射機通過天線把電磁波能量射向空間某一方向,處在此方向上的物體反射碰到的電磁波;雷達天線接收此反射波,送至接收設備進行處理,提取有關該物體的某些信息(目標物體至雷達
2020-06-23 15:44:02
HX711如何進行數據處理?
2016-11-21 22:03:43
STM32 USART串口接收數據的具體步驟有哪些?STM32 USART串口是如何進行數據處理的呢?
2021-11-25 08:56:51
/FMCW/FSK 模式,功能應用多樣,包括:探測動態目標的速度、靜態目標的距離、動態目標的距離和速度、目標的方位(角度測量)以及辨別運動的方向,非常適合應用在變道輔助系統上。該模塊輸出為模擬的I和Q信號
2015-10-09 12:15:29
人員計數的演示硬件和軟件毫米波技術提供了適用于環境影響的范圍,速度和角度信息IWR1642處理的所有檢測和信號處理; 將點云和物體信息傳輸到PC進行可視化6米遠處120o的方位角視場(FOV)(距離可以通過不同的啁啾配置進行修改或擴展)靜態雜波和群組跟蹤算法的實現示例設計文件原理圖/方框圖`
2018-05-29 20:59:01
具有全方位距離檢測功能,具有全方位距離顯示功能 能夠智能找出距離最短的能力
2014-03-06 15:26:32
雷達(SPR),探測隱蔽目標的雷達中有著廣泛的應用。由于其低頻特性,采用這一信號的雷達系統有利于進行穿透探測,同時大的信號帶寬可獲得高距離分辨力(厘米級的距離分辨率)、合成孔徑原理又可獲得高的方位
2019-08-21 06:17:14
,表層穿透雷達(SPR),探測隱蔽目標的雷達中有著廣泛的應用。由于其低頻特性,采用這一信號的雷達系統有利于進行穿透探測,同時大的信號帶寬可獲得高距離分辨力(厘米級的距離分辨率)、合成孔徑原理又可獲得高
2019-08-20 06:55:22
。在DBF模式下,系統配置與FMCW模式下的相同,但對IF下變頻信號的處理不同。在計算距離之后,通過評估四個接收通道之間的相位差來計算目標的角度信息。在DBF模式下,需要進行雷達前端系統校準,以消除接收
2018-10-17 10:56:32
:交通雷達技術的發展可分為主要三個階段。第一是單純的測速技術,利用多普勒原理實現目標速度檢測,但對于低速目標檢測精度較低。第二是測速 +測距技術,典型應用是卡口觸發雷達,在規定的范圍內提供數據觸發
2020-09-29 16:31:38
或直接注入給試驗雷達系統。目標回波信號包括目標的距離、角度、速度、雷達散射截面積(RCS)、一維距離像等信息。 系統總體指標要求如下:雙通道輸出;頻率范圍為5.2~5.8 GHz;窄帶瞬時帶寬為10
2019-06-03 05:00:08
實時計算所需要的回波,從而實現對雷達目標回波的模擬,這樣可以在沒有陣面數據的情況下,使信號處理分系統調試能夠正常進行,從而不影響科研進度,做到有問題早發現。 1 系統原理 由于要調試的是PD體制雷達
2011-07-13 09:09:26
,比如移動目標的分類、跟蹤、測距、判斷大小以及行為動作分析等,主要考慮的是移動目標區域的像素信息,所以對移動目標的準確檢測和有效分割是整個檢測跟蹤系統的重要基礎。圖1 公路上的運動汽車目前逐漸形成三種
2018-08-10 09:15:05
)的短距離雷達(SRR)應用,這種設計允許用戶估計和跟蹤位置(在方位平面內)和物體在其視場內的速度達80米。車輛的自主控制除了使正常的駕駛行為更加安全和更簡易之外,也還提供了生活質量和安全方面的好處
2018-09-25 10:43:20
(EVM)的短距離雷達(SRR)應用,這種設計允許用戶估計和跟蹤位置(在方位平面內)和物體在其視場內的速度達80米。 車輛的自主控制除了使正常的駕駛行為更加安全和更簡易之外,也還提供了生活質量和安全
2018-09-25 10:39:12
評估,驗證了所設計方法的有效性和實用性。 1 多傳感器平臺搭建 雷達和紅外傳感器是目前常用的兩種目標探測和跟蹤傳感器,采用雷達為主、紅外成像傳感器探測為輔的信息融合系統進行目標跟蹤能夠使系統降低
2018-12-05 15:16:23
前言隨著雷達技術的發展,雷達的任務不僅是測量目標的距離、方位和仰角,而且還包括測量目標速度,以及從目標回波中獲取更多有關目標的信息。雷達是利用目標對電磁波的發射(或稱為二次散射)現象來發現目標并測定
2019-07-19 06:34:48
軌跡提取的微多普勒特征分離方法,聯合使用常規的雜波抑制和脈沖積累方法提升目標信雜比,引入一維目標跟蹤方法實現人體運動軌跡提取,利用人體擴展特征,僅選取包含人體運動信息的距離單元數據計算 STDS,最后
2021-12-20 15:49:31
信號進行連續處理,提取出被探測目標的范圍和相對運動信息。空時自適應雷達(STAP) 等更復雜的處理方法進一步處理雷達反射信號信息,即使是在地雜波嚴重遮蔽,或者背景反射被探測目標周圍物體的情況下,也能夠
2013-11-13 15:56:28
傳感器等存在的各類問題和缺點。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。微波雷達傳感器,探測物體的運動,實現智能化聯動和場景
2021-09-07 16:02:05
、軍事、交通、環保、能源、遙感等等。下面對微波雷達傳感器作些簡單的介紹。雷達是利用電磁波探測目標的電子設備,通過發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率
2021-09-23 16:47:18
天線時,反射信號頻率會高于發射機頻率;相反,當目標遠離天線時,反射信號頻率會低于發射機頻率。這樣就可以通過頻率改變數值,通過信號處理器進行處理,計算目標和雷達的相對運動速度,然后識別目標的位置和形狀
2021-07-09 15:02:20
電子設備,通過發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、角度等信息。通過其反饋信息進行智能化操作應用,實現智能感應控制。微波雷達模塊,集成雷達
2021-10-12 16:08:21
傳感器方案可應用在眾多的物聯網產品上。微波雷達技術應用在這些領域上,與雷達技術原理分不開。雷達是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離
2021-08-23 15:54:54
輸光纖,被導入到信號處理裝置內光電二極管,利用計數器計數激光二極管啟動脈沖與光電二極管的接收脈沖間的時間差,即可求得目標距離。利用掃描鏡系統中的位置探測器測定反射鏡的角度即可測出目標的方位。 成象式
2012-10-21 11:13:31
和監控視頻技術的優勢,對復雜區域進行不同形態的探測。通過雷達獲取入侵目標的距離、速度、方位角信息,同時對入侵目標進行濾波,將獲取的目標參數與視頻智能技術相結合,進行目標識別、分類,雙重技術確認目標的真偽
2021-09-15 17:20:31
特質決定了毫米波雷達具有全天時全天候的工作能力。毫米波雷達通過向外發射信號并接收目標反射信號,根據收發的時間差測得目標的位置數據和相對距離,計算出相對速度,根據探知物體信息進行目標追蹤和識別分類
2021-08-24 16:47:09
距離、相對速度、方位角度等),然后根據所探知的物體信息進行識別和目標追蹤,進而結合車身動態信息進行數據處理。經合理決策后,以聲、光及觸覺等多種方式警告駕駛員,或及時對汽車做出主動干預,減少事故發生幾率
2019-12-16 11:11:22
最近在看毫米波雷達的東西,發現所有的介紹都是計算相對速度與距離,對于目標的方位角計算找了很久都沒有找到,有知道的普及一下,謝謝~~~~~
2016-11-23 20:25:29
光束的雷達。激光雷達的工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態
2019-09-19 09:05:02
波方式。連續波(CW)雷達是指發射連續波信號,主要用來測量目標的速度。?同時測量目標的距離,則需要對發射信號進行調制,例如對連續波的正弦波信號進行周期性的頻率調制。而脈沖雷達發射的波形是矩形脈沖,按
2021-09-22 16:17:32
地磁單模檢測器檢測精度低、漏檢情況嚴重的缺點,為智慧停車行業開辟了一條新的道路。雷達是利用電磁波探測目標的電子設備,通過發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率
2021-10-14 17:01:17
、相位堯、時間等信息解算障礙物與毫米波雷達之間的距離、相對速度、相對角度等信息。毫米波接收反射信號的功率 P,與到障礙物的距離 d 的一般計算公式為:目標分類與識別技術毫米波雷達根據目標回波的特征來
2020-07-01 14:16:38
系統主要包括收發天線、射頻前端、調制信號、信號處理模塊等。毫米波雷達通過接收信號和發射信號的相關處理實現對目標的探測距離、方位、相對速度。 毫米波雷達發展現狀 目前,毫米波雷達主要為24GHz
2019-12-16 11:09:32
為研究夜間追尾事故中本車智能防撞預警方法,本文提出了一種基于毫米波雷達和機器視覺的前方車輛檢測方法。利用多傳感器融合數據,檢測前方車輛的距離、速度等。建立傳感器之間轉換關系,轉換雷達目標的世界坐標到圖像坐標。
2021-06-10 10:23:08
激光雷達距離像背景抑制算法研究相干激光成像雷達距離像處理的一個重要內容就是進行背景抑制。利用原始強度像的均值信息進行距離像的背景抑制因為強度像受到噪聲影響而效果不佳,改進算法加入了強度像的噪聲濾除
2009-08-08 09:40:21
的信息量豐富:可直接獲取目標的距離、角度、反射強度、速度等信息,生成目標多維度圖像;4、可全天時工作:激光主動探測,不依賴于外界光照條件或目標本身的輻射特性。它只需發射自己的激光束,通過探測發射激光束
2017-09-19 15:51:15
,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟蹤和識別。在智能感知識別的部分,車載光學系統和車載雷達系統是保證行車安全
2017-10-18 17:18:24
接收器,接收端通過光電探測器形成信號接收,經過信號處理得到目標的距離、速度等信息或實現三維成像。激光雷達主要包括激光發射部分、掃描系統、激光接受部分和信息處理部分,結構較為復雜。從激光雷達的工作來看,主要分成四大部分:1)激光發射部分:激勵源周期性地驅動激光器,發射激光脈沖,激光調制器通過光束
2021-09-13 06:30:11
小(μrad量級)的激光束,多路徑效應小(不會形成定向發射,與微波或者毫米波產生多路徑效應),可探測低空/超低空目標; 3、獲取的信息量豐富:可直接獲取目標的距離、角度、反射強度、速度等信息,生成目標多維
2020-07-14 07:56:45
`描述TIDEP-0092參考設計為使用AWR1642評估模塊(EVM)的短程雷達(SRR)應用提供了基礎。這種設計允許估計和跟蹤位置(在方位角平面中)和物體在其視野中的速度,最大可達80米,行進
2019-01-25 14:35:52
電子設備,通過發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、角度等信息。CW多普勒雷達傳感器,使用多普勒效應原理,測量得出不同距離目標的的速度
2021-10-27 15:46:03
本文由回映電子整理分享,歡迎工程老獅們參與學習與評論本文針對生命體檢測中目標定位與呼吸頻率檢測問 題進行了研究,用超寬帶步進變頻雷達對目標進行檢測,利用回波的矢量信號對目標進行距離域一維成像,通過
2022-01-10 14:23:21
發射三段具有相同調頻帶寬、不同調頻斜率的信號,持續時間分別為2T1,2T2和2T3。在對回波信號進行數據處理時,分別對三段信號使用與LFMCW相同的算法,最終會得到三組各N2個距離-速度值。對于真實目標
2018-09-17 15:21:21
毫米波雷達是測量被測物體相對距離、現對速度、方位的高精度傳感器,早期被應用于軍事領域,隨著雷達技術的發展與進步,毫米波雷達傳感器開始應用于汽車電子、無人機、智能交通等多個領域。
2019-08-07 08:01:28
超聲波雷達在測距的時候,算出距離結果需不需要做一些數據的濾波處理?我現在算出來的距離有一些波動(10cm)左右。
2020-03-09 16:19:08
采集、傳輸、處理的核心任務,以下為該系統及ADQ14板卡的應用介紹。1,船用雷達系統簡介該系統與以往的傳統雷達系統不同,并非用于單個目標的識別,而是應用判斷目標以外的背景信息,實現特定目的的搜索功能。可以說
2016-05-20 11:51:39
基于線性調頻連續波雷達可提取目標的距離信息和多普勒頻率,分析了線性調頻連續波在高頻雷達中的應用,推導出差頻信號的表達式和利用二維快速傅里葉變換進行距離/多普勒
2009-03-08 18:17:16 30
30 對稱目標的ISAR像橫向距離定標方法與性能分析:目標橫向定標是實現目標模板匹配識別和特征提取的基礎。該文利用橫向多普勒頻率和橫向坐標位置的近似正比關系,基于對稱目標的
2009-10-29 12:53:5312 一種基于順序統計量的距離擴展目標檢測器::該文提出一種高斯白噪聲中的距離擴展目標檢測器。實際目標的寬帶雷達回波能量往往集中于若干距離單元中,基于這一事實,對檢測
2009-10-29 13:07:2213 步進頻率雷達中,目標的徑向運動將導致合成的目標徑向一維距離像產生距離徙動和波形失真,需要對目標速度進行測量以補償其影響。該文提出基于單個步進頻率脈沖串的共軛法
2009-11-24 15:06:4610 在雷達探測飛行器目標的仿真過程中,需要計算目標被電磁波照射的方位,并且判斷目標是否在雷達的探測范圍內,還要根據距離計算檢測概率,故需要求出雷達和目標的相對方位
2009-12-14 15:20:2914 【摘 要】 從雷達對運動目標的檢測和顯示能力出發,探討了影響雷達動目標改善因子提高的約束條件,分析了動目標處理系統實現的可能性。通過計算機仿真計算驗證,為系統
2009-05-16 19:33:591742 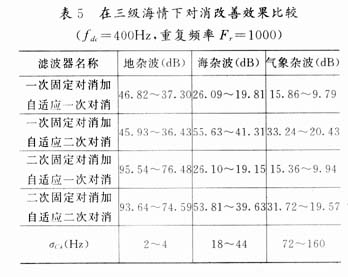
二次雷達也稱為航空交通管制雷達信標系統,通過地面站和目標應答器之間的詢問和應答,實現對目標的跟蹤,接收到的回波中包含了目標的距離和方位信息、氣壓高度信息,還可以用
2011-05-31 11:08:087739 
隨著信息技術的發展,雷達數據處理的研究有以下幾個發展方向:弱小目標的自動跟蹤,可利用幀間濾波、檢測前跟蹤和先進算法來提升自動跟蹤性能;高速計算與并行處理;多傳感器信息
2011-08-27 01:17:351737 
通過對二次相差法測距性能進行了仿真分析,仿真結果表明,基于雙頻比相測距的二次相差法多篇連續波雷達,只能求解速度不同的目標的距離值,無法求解同速度不同距離目標的距離值。
2012-04-20 10:48:528 當雷達探測到目標后, 可從回波中提取有關信息,如實現對目標的距離和空間角度定位,并由其距離和角度隨時間變化的規律中得到目標位置的變化率,由此對目標實現跟蹤; 雷達的測量如果能在一維或多維上有足夠
2017-11-15 14:25:4528 激光雷達,是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的
2019-01-14 15:49:418242 雷達是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。
2019-11-13 07:02:002348 雷達是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。
2019-11-12 07:03:003824 因此,雷達也被稱為“無線電定位”。雷達是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。
2019-11-08 07:09:002572 算法:采用MATLAB仿真,分別對具體的目標速度,距離,角度等有一個深刻的認識,掌握如何檢測判別目標,升華到如何進行一維距離像的識別,雷達總體參數設計。
2019-11-08 07:05:001675 雷達是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。
2019-10-09 07:10:002677 提出了將變抽樣率處理技術應用于機載雷達下視探測,以從地雜波中檢測運動目標的方法。首先分析了信號模型,針對這一模型,討論了變抽樣率處理技術應用問題,最后進行了仿真,仿真結果,表明該方法可行。
2019-07-26 17:06:2717 雷達(Radar)是Radio detection and ranging的縮寫,無線電探測和測距,即用無線電方法發現目標并測定他們在空間的位置。現代雷達不僅僅是測量目標的距離、方位和仰角,而且還包括測量目標速度,以及目標回波中獲取更多有關目標的信息。
2019-10-21 16:52:573879 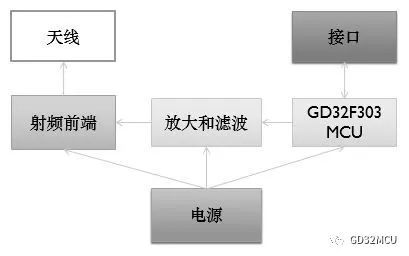
激光雷達,是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的
2020-02-18 10:17:548957 
雷達接收機對回波信號進行處理,從而確定各目標的距離和速度,處理方法通常有兩種,一種是寬帶接收機,直接解調I/Q數據,與數字匹配濾波器(發射信號I/Q數據的共軛)運算獲得目標探測結果;另一種是窄帶接收機,其混頻器的本振直接采用發射信號,相當于硬件匹配濾波,在中頻分析獲取目標探測結果。
2020-05-14 15:31:269068 
后通過天線以電磁波的形式輻射出去,遇到物體反射的回波被天線接收,雷達想要探測的物體稱為目標,而將其他物體的回波稱為雜波。 天線接收到的信號經過放大并進行信號處理,獲得目標信息后由屏幕顯示出目標的距離、速度和方
2020-11-04 15:05:207850 雷達是一種利用電磁波探測目標的電子設備,通過發射電磁波對目標進行照射并接受其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、角度等信息。
2021-06-10 09:52:334519 
:充分利用雷達給出距離、角度、速度,對視覺進行導引,聯動,目標融合。 雷達是利用電磁波探測目標的電子設備,通過發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、
2022-03-04 15:16:45608 由于發射信號的多普勒效應,脈沖雷達可以方便地計算出目標的瞬時速度。FMCW雷達使用頻率來計算目標距離,多普勒效應和目標距離造成的頻差混淆在一起,不易區分開。為了克服這個問題, FMCW雷達需要發射多個不同斜率的連續波并對結果進行處理,否則容易產生虛假目標。
2022-05-05 09:16:482043 毫米波雷達作為一種工作在毫米波頻段(millimeter wave)的雷達傳感器,通過精準探測目標的距離、速度、方位角和微動等信息,被廣泛應用于車載、交通、安防、工業測量、家居、康養等諸多領域。
2022-09-30 11:51:231046 雷達是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。
2022-11-30 11:51:161618 雷達通過天線發射電磁波照射目標,并接收目標反射回的微弱信號,經過信號處理檢測出關于目標或環境的信息,例如距離、速度、方位、散射特性等。從雷達系統的基本處理過程可以看出,雷達主要包括發射機、天線、接收機、信號處理器、顯示器等部分。今天主要給大家詳細分析目標的雷達散射截面積。
2022-12-19 09:49:461174 傳統毫米波雷達只能接收到有限的返回信息點,僅能判斷出前方是否有障礙物;在毫米波雷達原有距離、方位、速度的基礎上,4D毫米波雷達增加了對目標的高度維數據解析,能夠實現“3D+高度”四個維度的信息感知;
2023-01-04 10:33:011000 常見的雷達靠天線來確定雷達波束的指向,天線指向哪里,雷達波就射向哪里,我們把這種方法叫做機械掃描。
而采用相控陣體制的雷達,可以通過電子掃描的方式,直接讓電磁波變換方向。因為巨大的天線本身重量的限制,機械掃描的速度會很慢,這就給跟蹤空中高速目標帶來不便。
2023-02-07 10:30:49827 雷達的工作方式,如上圖所示,通過天線將電磁波輻射出去,電磁波在空中傳播,碰到目標,目標反射電磁波,反射的電磁波一部分被天線接收,雷達比對發射出去的電磁波和接收回來的電磁波,從而獲得目標的相關信息。
2023-02-07 11:21:101805 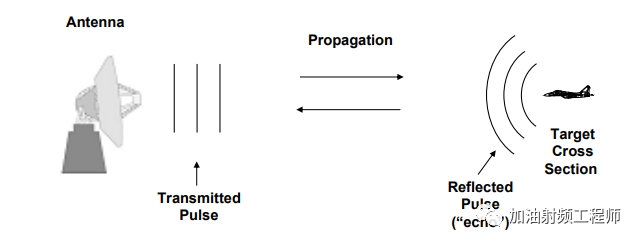
反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟蹤和識別。 據小編音圈模組獲悉,在近日,高性能激光雷達解決方案供應
2023-04-21 09:01:43540 
傳統毫米波雷達也叫3D毫米波雷達,具有3個維度的信息,分別是距離、速度、方位角。而4D毫米波雷達在此基礎上增加了高度信息,形成了4維信息輸入,避免了以往對于路牌、地面井蓋等目標的誤識別。
2023-05-25 11:46:361508 
連續波雷達發送的是一個連續的無線電頻率信號,通過接收目標反射回來的回波信號來檢測目標并計算距離。連續波雷達的優點是信號處理簡單、便于制造和使用,但其缺點是抗干擾性能較差,難以精確測量高速目標的速度等問題。常見的連續波雷達包括移動雷達、陣列雷達、固定波束雷達等。
2023-06-02 18:00:316223 雷達(Radar)是利用電磁波進行探測與測距的一種電子設備。雷達的主要作用是以無線電波的形式將目標的信息轉化為電信號,并對收到的反射信號進行處理和分析,從而實現探測目標的位置、速度和大小等相關信息。
2023-06-02 18:05:296114 雷達是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。由于雷達波束的發射需要具有多個方向,以保證
2022-11-24 09:51:401123 
毫米波雷達(mmWave Rader)采用毫米波作為電磁波發送信號,捕捉并處理電磁波經過路徑障礙物的反射信號后可獲取目標物體的速度、距離、方位角和高度等信息。
2023-09-11 10:38:251283 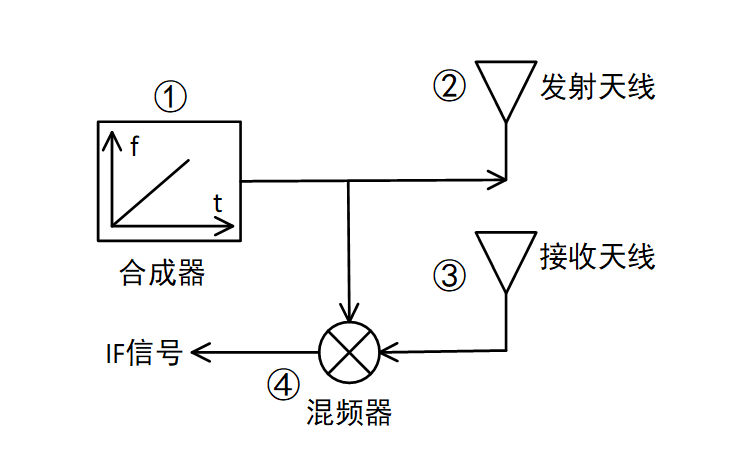
連續波(CW)雷達廣泛應用于許多運動檢測應用中。它通過比較發送和接收信號的頻率差,來測量目標的速度。然而,CW雷達無法測量目標的距離,因為它無法區分頻率變化是由于目標的速度變化還是距離變化。
2023-10-23 10:02:50298 電磁雷達使用電磁波進行探測和測量。它通過發射無線電頻率的電磁波,并接收其反射回來的信號來計算目標的距離、速度和角度等信息。激光雷達則使用激光束進行探測和測量。
2023-10-30 17:43:412297 電子發燒友網站提供《利用毫米波雷達探測目標的電子設備.docx》資料免費下載
2023-11-06 17:23:074
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論