
 無人駕駛汽車測試方案的深入思考 - 無人駕駛汽車測試方案分析
無人駕駛汽車測試方案的深入思考 - 無人駕駛汽車測試方案分析
無人駕駛汽車測試方案的深入思考
本文是作者在TRC國際交通大會上的報告節選,探討了無人車存在的一些問題及其測試方法。
1.為什么要進行無人車測試
首先考慮到的原因是避免事故。
最近關于特斯拉汽車自動模式導致的一起致命車禍將熱衷于無人車的粉絲的激情迅速拉到冰點。
下圖是CBS電視臺給出的交警初步報告,直路飛速行駛的Tesla毫無減速攔腰撞到了一輛白色重卡的拖車,比頭圖
給出的示例還要慘烈,駕駛艙當時被削平,前進數十米后離開路面,撞擊數個圍欄,旋轉后停下。駕駛員當場斃命
,只剩那個手持的播放器還穩健地播放著哈利波特。就像文章開頭所說的,駕駛員溜號了,而傳感器中的攝像頭其
實看到了一個大白板而已,毫米波安裝太低而超聲檢測距離太近,然后就有了Tesla官方博客所說的“Mobileye把卡
車當成了藍天白云,毫米波把卡車當成了路牌,發生了嚴重事故,被NHTSA調查(可能會召回)。”
(圖中紅車是特斯拉,藍車是大卡車)
那么Google無人車的情況是不是要好一些呢?好像情況也不太樂觀。
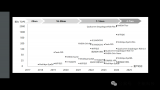
以下是美國加州DMV公布的自2014年10月以來發生的15起無人車事故,其中12起是Google公司的無人車引起的。
最近一次發生在山景城,一輛Google無人車為了避免與前方障礙物發生相撞,變道時與后方的一輛公家車相撞。
Nissan May 10, 2016
Google April 28, 2016
Google April 7, 2016
Google February 14, 2016
Cruise Automation January 8, 2016
Google November 2, 2015
Google August 20, 2015
Google July 1, 2015
Google June 18, 2015
Google June 4, 2015
Google May 30, 2015
Google April 27, 2015
Google April 7, 2015
Google February 26, 2015
Delphi October 14, 2014
其次是保證極端條件下無人車傳感器的可靠性。
我們知道無人車最重要的三種類型的傳感器分別為:3D激光雷達,毫米波,視覺傳感器。但是這些傳感器在雨天、
霧天、冰雪天氣或者夜間其性能將大打折扣,無法精確感知周圍環境中的動態和靜態物體,是無法保證車輛行駛安
全的。
最后一個原因是防止駭客攻擊將是無人車永遠面臨的課題。
Jonathan Petit, principal scientist at software security company Security Innovation, discovered that a laser
pointer could interfere with the laser ranging (Lidar) systems that most self-driving cars rely on to navigate.
The Lidar system creates a 3D map and allow the car to ‘see’ potential hazards by bouncing a laser beam
off obstacles.
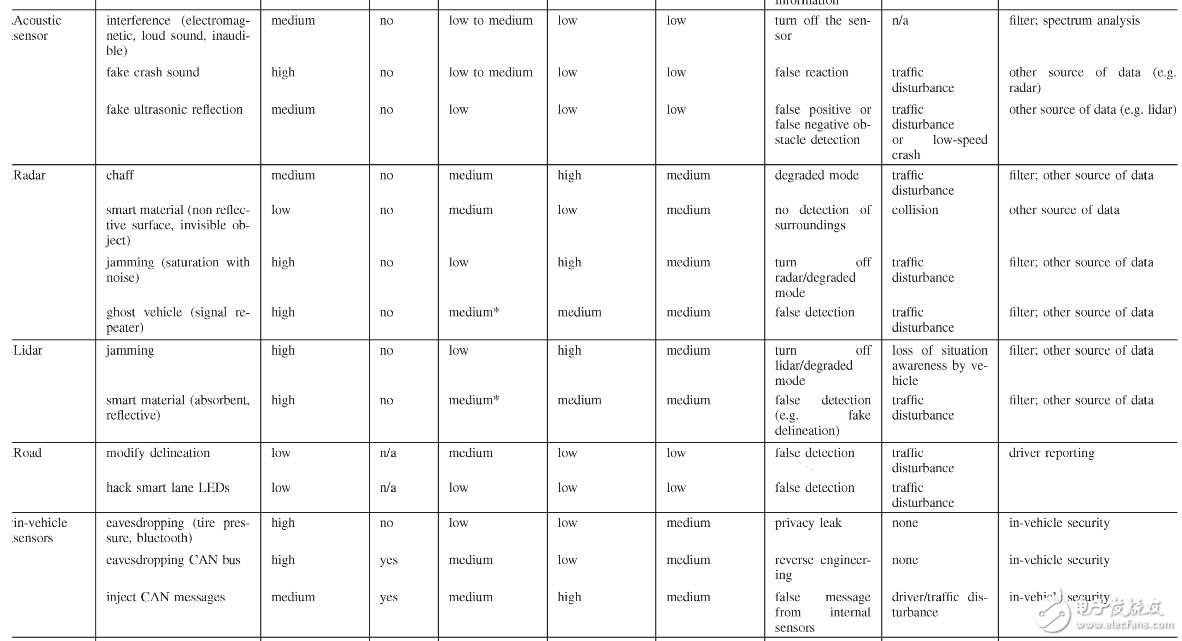
Jonathan Petit認為一根激光筆就可以干擾無人車的激光測距系統。他和Path的Steven shladover博士分析了無
人車潛在的被攻擊風險,列出了12種無人車可能被攻擊的對象。


2.可以從現有傳統的汽車測試經驗中學到什么?
2.1現有的汽車室內臺架測試是怎么做的?
傳統的汽車室內檢測是在室內臺架上模擬道路行駛條件,讓汽車的車輪行駛在自由滾筒上,通過反力制動方式
檢測車輛的制動力,還可以模擬車輛的運行工況檢測車輛的排放和油耗性能。在汽車室內檢測設備中有兩項偉
大的發明,一個是反力式制動實驗臺、另外一個是測功機。前者可以將汽車制動轂上的制動力轉換為電機定子
與轉子之間的扭力。后者可以將汽車發動機的輸出功率轉換為電渦流制動器輸出的力矩和滾筒速度,實現W=F*V
的測量。這兩項發明從60年代問世以來,在全世界各地應用推廣,成為汽車檢測的利器,也使得汽車檢測由”眼觀、
耳聽、鼻嗅、手摸“式的人工測量變成高效科學的機器化測量。汽車室內檢測大大縮短了過去必須在道路進行的道
路試驗,實現了檢測的流水化和自動化,提高了效率,保證了汽車的安全性能。
2.2 現有的無人車競賽是如何進行無人車測試的?
無人車競賽是世界各國進行無人車技術測試的一種重要手段,比較知名的無人競賽有:美國國防部高級研究計
劃局(DARPA)舉辦的“GRAND Challenge”比賽,德國軍方組織歐洲陸地機器人競賽和中國國家自然基金委組織的“未
來挑戰”無人駕駛車比賽。無人車競賽主要是通過設置一些程序化的比賽項目和比賽路線,讓無人車自主完成過交叉
口,避撞行人,超車,指定位置停車,過立交橋等任務,記分規則為將不同項目計不同的分值,完成任務則得分,
失敗不得分甚至扣分,然后除以總時間,以此進行排序。這些任務涉及到了環境感知,路徑規劃,高精度定位,自
主決策等多層次的任務。無人車競賽這種方式促進了參賽方不斷地進行技術積累,超越自我,同時也提供了一個同
臺獻技、交流合作的平臺,同時還是一個無人車人才培養的平臺,隨著無人車競賽的難度不斷加大,無人車新技術
也不斷涌現,讓無人車朝著商用化的目標一步步邁進。
2.3無人車道路試驗
在無人車實驗中,Google公司最熱衷于道路試驗,因為道路試驗最真實,最可靠,遇到的一切場景將是無人車未來
必須面臨的場景。因此Google公司進行了約170萬英里的無人駕駛道路試驗,在各種道路上進行測試,包括高速公路,
城市擁擠道路,舊金山的九曲十八彎,沙漠道路,大學校園,可以說能想象到的道路都進行了測試,目前Google公司
統計的無人車事故率為每10萬英里0.6起,已經非常接近人類的記錄,即每10萬英里0.3起。
2.4 蘭德公司對無人車的質疑
美國蘭德公司是一家全球知名的顧問公司,經常給美國國會提供全球各國軍事實力對比報告。這一次蘭德公司針對無人、車的應用前景也發布了一份將近300頁的白皮書。在該白皮書中提出了三個問題:
1)How many miles would autonomous vehicles have to be driven without failure to demonstrate that their
failure rate is below some benchmark?This provides a lower bound on the miles that are needed.However,
autonomous vehicles will not be perfect and failureswill occur.(無人車至少要無故障地行駛多少公里才能證明
其事故率低于某個指標,這只是提供了一個下界,并不能說明無人車100%精確或者故障不會發生)
2)How many miles would autonomous vehicles have to be driven to demonstrate their failure rate to a
particular degree of precision?
(無人車至少要無故障地行駛多少公里才能證明其事故率的精度是可信的,比如:10萬英里的事故率是0.3,那么第二
個10萬英里會不會還是0.3?第100個呢?)
3)How many miles would autonomous vehicles have to be driven to demonstrate that their failure rate is
statisticallysignificantly lower than the human driver failure rate?(無人車至少要無故障地行駛多少公里才能證明
其在統計意義上是比人工駕駛安全的呢?)
蘭德公司通過簡單的統計分析進行了估算,結論如下:
該報告指出:1)達到1.09死亡人數/1億英里的事故率,需要測試12.5年(365天40mile的速度無間斷測量);2)事故率精度達到95%,上下20%方差,需要測試400年;3)以95%的概率,第二類假設80%可能性的前提下,無人車的性能超過人工駕駛性能的20%,需要測試500年。
蘭德公司指出:道路試驗無法測試出無人車的潛在危險,必須進行方法上的創新,從無人車各個部件和軟件的源頭設計測試規則,才能保證無人車這項技術,可以為人類造福,才能管控無人車不但演變過程中存在的風險。
3.關于無人車測試方法的設想
3.1一種多層次的無人車測試框架
在現有的測試基礎上,我們提出了一種多層次的無人車測試框架,將無人車的測試分為5個層次,分別為:1、元功能測試;2、封閉環境中極端條件下測試;3、基于虛擬現實和硬件在換仿真測試;4、隨機道路抽取測試;5、用戶培訓和應用技能測試
3.2元功能測試
元功能是指無人車的功能分解后,不能再進行分解的功能。包括無人車的定位功能,環境識別功能,動作執行功能,
速度控制公路,路徑規劃,綜合決策功能等,任何一項功能判斷其是否為元功能,則首先判斷其是否能被分解。
3.3封閉環境中極端條件下測試
極端條件下測試是對無人車各項綜合功能的極限測試,是測試95%常態以外很少出現,但是又是致命的極端條件下的測試,包括各種惡劣天氣,惡劣光線條件、惡意交通行為干擾等等,這類測試是保證無人車可靠性能的關鍵。
3.4基于虛擬現實和硬件在環仿真測試
道路試驗雖然可以測試無人車在商用環境中的性能,但是其費時、費力,而且并不能窮舉所有的道路環境情況和交通事件。如果采用虛擬現實技術將道路環境和交通事件錄制在數據庫中,采用回放的方式輸入到無人車的傳感器接口中,通過判斷無人車在不同道路環境條件下的動作執行正確率來評估無人車的智能將是一件非常有趣的事情。同時,利用該項技術可以在無人車機器人與老司機之間展開一場人機大戰,將一種綜合的,不可以定量化的比賽搬到室內。更可怕的事實是這輛無人車將偷師老司機,通過深度學習來訓練自己。還有一個優點是,該方法可以進行測試環境的語義壓縮,在道路試驗中,80%的道路是平坦的,筆直的,10%是有驚無險的,只有10%是挑戰無人車智能的,在虛擬的測試環境中,是可以對這20%的環境和條件進行壓縮出現的,因此其挑戰性更大。好比天上一日,地下一年。
3.5隨機道路抽取測試
在完成基于VR的測試后,還要防止“秀才紙上談兵,光說不練”的尷尬,是騾子是馬,需要出來遛一遛。通過前期的測試結果,設計一定算法,抽取一定的實際道路樣本對無人車弱項進行測試,這樣才能保證其“實踐能力”。
3.6用戶培訓和應用技能測試
在完成無人車自身測試的基礎上,還需要進行無人車用戶的專門培訓和測試,這樣才能保證用戶在緊急事件發生的情況下從容應對。
4.已完成的工作
4.1網聯汽車與無人車綜合測試試驗場
在長安大學趙祥模教授的帶領下,本課題組已完成了全國高校唯一的人車路環境綜合測試場的電子化、智能化改造用于網聯汽車和無人車的測試。整個試驗場具有以下5個特點:
1) 5種無線網絡(4G-LTE、LTE-V,Wi-Fi,DSRC,EUHT)的全覆蓋;
2) 自建地面高精度定位基站,定位精度30cm,可實現全試驗場無死區全覆蓋;
3) 建設有便利的交通設施(龍門架、相機、檢測線圈、交叉口信號控制系統、交通標志、光纖網絡);
4) 多種不同形式的路面(0.1-0.9不同附著系數路面)和道路形式(高速環道、入口并線、交叉口);
5) 全部電子化的設施管理。
4.2網聯汽車與無人車開發
開發了3輛無人車,2輛全自動無人汽車。
長安大學趙祥模教授課題組開發的無人車暢游長大校園!http://v.youku.com/v_show/id_XMTY0NDI3MjQ0OA==.html
5.結論


























 工商網監
工商網監
評論