 電子發燒友App
電子發燒友App


五相混合式步進電動機走步均勻性分析
文章對五相混合式步進電動機采用下橋臂電流恒定不變式恒流斬波驅動時的步進均勻性進行了詳細分析,針對存在的不足,提出了下橋臂電流恒定值可變式恒流斬流驅動方案。?
關鍵詞:混合式步進電動機;斬波;驅動電路
Step Uniformity Analysis for 5phase Hybrid Step Motor
WANG Youjun
(Institute of Sciences, PLAUST, Nanjing 210016, China)
Key words: hybrid step motor; chopping; driving circuit
開環工作方式下,步進電動機走步的均勻性與驅動電路形式密切相關。五相混合式步進電動機主電路驅動控制方式有升頻升壓驅動和定壓恒流斬波等驅動方式,定子繞組聯接有五相星接、五邊形聯接和五相全H橋聯接三種方式。定壓恒流斬波驅動適合于對高速力矩和抗沖擊性有高要求的場合。實踐中發現:驅動主電路采用下橋臂電流恒定值不變式定壓恒流斬波,定子繞組五邊形聯接時,電機在低頻率下運行,有走步不均勻性現象。本文對此進行了詳細分析,并提出了下橋臂恒流值可變式恒流斬波驅動方案。
 ?
? 式中N—每相繞組的串聯匝數;NI—每相繞組的磁動勢;Z2—轉子的齒數;θ—矩角;Ad—直軸磁導;Aq—交軸磁導。
電磁轉矩最大值Tmax與每相繞組磁動勢(或相電流)的平方成正比,所以步進電動機屬于對繞組電流十分敏感的傳動電動機。

主電路如圖1示,下橋臂電流恒定值固定為相繞組額定電流的兩倍2I。以半步運行為例,4-5勵磁的20種通電狀態中4相勵磁與5相勵磁交替進行,根據環分控制邏輯不難分析,主電路穩態等值電路基本結構為4拍一循環,所以單步響應特性也是4拍一循環。混合式步進電動機的驅動控制主要體現為對轉矩矢量的控制,而繞組電流又直接與轉矩相關。以一相繞組通以額定電流I產生的定位轉矩T為基準,首先分析相鄰4拍 繞組電流及其相應派生定位轉矩矢量的變化規律。

派生定位轉矩矢量為:

派生定位轉矩矢量為

派生定位轉矩矢量為
 ?
?

從以上分析可以看出:派生定位轉矩矢量變化不均勻,表現在大小上不一樣,轉矩波動相當明顯,最大值是最小值的2.15倍;相位變化也不均勻,5相勵磁產生了附加步距誤差。這些因素反映在步進電動機低頻運行時,走步有明顯的“強”“弱”或“重”“輕”,加劇了電機的低頻震蕩,這對低速工作是不利的,另外步矩角的不均勻也影響到系統的脈沖當量。
派生定位轉矩矢量為:
派生定位轉矩矢量為
派生定位轉矩矢量為
? 從以上分析可以看出:派生定位轉矩矢量變化不均勻,表現在大小上不一樣,轉矩波動相當明顯,最大值是最小值的2.15倍;相位變化也不均勻,5相勵磁產生了附加步距誤差。這些因素反映在步進電動機低頻運行時,走步有明顯的“強”“弱”或“重”“輕”,加劇了電機的低頻震蕩,這對低速工作是不利的,另外步矩角的不均勻也影響到系統的脈沖當量。
若改下橋臂恒流斬波的電流恒定值隨繞組勵磁狀態變化,可以改善定位轉矩矢量變化的均勻性。具體分析如下。

條件:B相下橋臂恒流斬波的電流恒定值為2I;D相下橋臂恒流斬波的電流恒定值為1.5I。各相繞組電


條件:D相下橋臂恒流斬波的電流恒定值為2I;B相下橋臂恒流斬波的電流恒定值為1.5I。各相繞組電

條件:D相下橋臂恒流斬波的電流恒定值為2I;A、E相下橋臂恒流斬波的電流恒定值為I;各相繞組電

由以上分析不難看出,派生定位轉矩矢量變化的均勻性得到較大改善,轉矩波動相當小,最大值僅是最小值的1.11倍,且無附加步距誤差。
條件:B相下橋臂恒流斬波的電流恒定值為2I;D相下橋臂恒流斬波的電流恒定值為1.5I。各相繞組電
條件:D相下橋臂恒流斬波的電流恒定值為2I;B相下橋臂恒流斬波的電流恒定值為1.5I。各相繞組電
條件:D相下橋臂恒流斬波的電流恒定值為2I;A、E相下橋臂恒流斬波的電流恒定值為I;各相繞組電
由以上分析不難看出,派生定位轉矩矢量變化的均勻性得到較大改善,轉矩波動相當小,最大值僅是最小值的1.11倍,且無附加步距誤差。
按照改進方案,每相下橋臂恒流斬波的電流恒定值隨繞組勵磁狀態變化,在下橋臂開通時根據勵磁狀態不同有I、1.5I和2I三種取值,電路如圖3,通過開關切換改變電阻分壓值得到所要求的電流設定值。模擬開關k1a和k2a可采用CD4066集成電路實現。

由式(1)可確定電阻R?0和R?1的阻值。
k1ak2a=10時,比較器U“+”端門限值為

由上式可確定電阻R3的阻值。
表1為整個五相電流控制開關與環分信號對應的開關真值表。某相下橋臂未開通時,表中的邏輯值為隨意值。開關真值表可結合環分信號用EPROM或CPLD等器件來實現。




相關推薦
步進電動機及其控制方式
知識架構框圖一、步進電動機簡介1、步進電機主要功能1、步進電動機(Stepping Motor,或 Step Motor 、Stepper Motor)是一種可由電脈沖控制運動的特殊電動機,可以通過
2021-06-29 07:40:00
步進電動機基礎知識
。步進電動機的種類 根據勵磁式方式的不同分為:反應式、永磁式和混合式(又叫感應子式)三種。反應式步進電機的應用較多。下面以反應式步進電機為例
2008-11-19 23:54:15
步進電動機是如何工作的
,從而達到精確定位的目的;同時還可以通過控制脈沖頻率來控制電動機轉動的速度和加速度,從而達到調速的目的。一:線、相、極性的概念“相” 就是說明步進電機有幾個線圈(也叫做繞組)。“線” 就是說明步進電機有
2021-08-31 07:53:31
步進電機14問
度,但噪聲和振動都很大。在歐美等發達國家80年代已被淘汰;混合式步進是指混合了永磁式和反應式的優點。它又分為兩相和五相:兩相步進角一般為1.8度而五相步進角一般為 0.72度。這種步進電機的應用最為
2014-01-21 14:55:59
步進電機有哪幾種類型?
類型。混合式步進電機將前兩類步進電機的優點綜合于一身。混合式步進電機根據線圈極數可分為 兩相、三相、五相步進電機。兩相混合式步進電機目前應用最為廣泛。常見的兩相混合式步進電機的定子...
2021-07-08 09:34:00
步進電機的選型
、57、86、110等3、步進電動機構造:由轉子(轉子鐵芯、永磁體、轉軸、滾珠軸承),定子(繞組、定子鐵芯),前后端蓋等組成。最典型兩相混合式步進電機的定子有8個大齒,40個小齒,轉子有50個小齒;三相電機的定子有9個大齒,45個小齒,轉子有50個小齒。4、步進電動機主要參數步進電機的相數:是指電機
2021-06-28 13:06:37
D306型號三相伺服混合式步進電機驅動器具有哪些特點?怎樣去使用它?
單片機步進電機控制器是什么?怎樣去制作一種單片機電動機控制器?D306型號三相伺服混合式步進電機驅動器具有哪些特點?怎樣去使用D306三相混合式步進電機驅動器?
2021-07-13 08:09:56
stm32控制步進電機加速度
Driver驅動高精度系列二相混合式步進電機多細分驅動器1、使用說明:1、VCC&GND:20~40V DC; 2、A+A- B+B-:接二相混合式步進電機的2相; 3、工作額定電流:3A;...
2021-07-08 07:29:05
【原創分享】步進電機介紹、分類及應用中的問題探討
同步電機等電機中的應用有較多的研究,相關文獻較多。混合式步進電機與永磁凸極同步電動機在作用機理上相似,雖有不同之處,但從本質上,混合式步進電機可以說是一種低速凸極永磁同步電機,混合式步進電機控制可以
2021-09-10 08:45:23
【案例分享】兩相混合式步進電機驅動平臺開發進階
,得認清女人的類別,挑一類自己好口的進行針對性的進攻這樣方可告捷啊。于是就百度啊google啊,得到以下結論:步進電機分三種:永磁式(PM)、反應式(VR)和混合式(HB)。永磁式步進一般為兩相,轉矩
2019-07-27 04:30:00
兩相四線混合式步進電機用雙H橋驅動電路之Multisim仿真及優化 相關資料推薦
1. 仿真圖2. 驅動電路原理解析2.1 兩相四線混合式步進電機驅動原理首先給出兩相四線混合式步進電機的整步驅動順序圖。可以看出,兩相驅動電壓的相位差為90°,因此,第一節中驅動電路的兩個脈沖電壓源
2021-07-08 07:24:12
二相混合式步進電機開環細分控制simulink建模仿真含模型文件
細分原理二相混合式步進電機電磁轉矩方程?p-轉子級數;Zr-轉子齒數Zr=2*p;Ta-a相電磁轉矩;Tb-b相電磁轉矩;Td-定位矩(關于二相混合式步進電機的數學模型可參見我的另一篇博客https
2020-06-14 22:33:19
二相混合式步進電機電磁轉矩的原理是什么?
細分原理二相混合式步進電機電磁轉矩方程p-轉子級數;Zr-轉子齒數Zr=2*p;Ta-a相電磁轉矩;Tb-b相電磁轉矩;Td-定位矩(關于二相混合式步進電機的數學模型可參見我的另一篇博客https
2021-07-08 09:59:07
二相混合式步進電機閉環矢量控制simulink仿真(含仿真文件)
; θ、ω 分別為電機轉動角度及轉動角速度; Nr 為轉子齒 數; Te 為混合式步進電動機的電磁轉矩; J、B 分別為 負載轉動慣量和粘滯摩擦系數。電流環部分傳遞函數實際運行中,二相混合式步進電動機旋轉反電 勢調節
2020-06-14 22:35:18
二相混合式步進電機,鎖步時電流聲音很大,驅動器是lv8729v,細分設置為2,單片機是stc15系列的。
如題目描述,二相混合式步進電機,鎖步時電流聲音很大,驅動器是lv8729v,細分設置為2,單片機是stc15系列的。但并不是所有鎖步的時候電流聲音都大,會間隔出現,而且總是在某一次運動之后才會有。不知道是什么原因造成的,求大神指點。
2016-12-21 10:09:33
于MATLAB/Simulink的二相混合式步進電機的建模與仿真
上圖中的Te仿真中有兩個小錯誤,正確方程應為:模型文件名為:model_of_Two_phase_Hybrid_stepping_motor.slx(2019b)參考文獻:基于MATLAB/Simulink的二相混合式步進電機的建模與仿真
2021-08-31 06:13:04
介紹一種兩相四線混合式步進電機用雙H橋驅動電路
下圖為兩相四線混合式步進電機用雙H橋驅動電路。圖中Ra、La、Rb、Lb分別為兩相四線混合式步進電機的兩相電阻及電感參數。
2021-07-07 07:15:42
伺服電機與步進電機的不同點是什么
,即其脈沖當量為360度/131072=0.00274658度,是步距角為1.8度的步進電機脈沖當量的1/655.2.低頻特性不同兩相混合式步進電動機在低速運轉時易出現低頻振動現象(因為步進電機是...
2021-06-28 09:56:07
基于單片機的通用型五相混合式步進電機驅動器設計
分析了電腦繡花機系統中,現有的五相混合式步進電機驅動器存在低頻轉矩振蕩、高頻輸出轉矩不足和多電源供電及不通用等諸多不足之處的基礎上,設計出一種基于單片機的通用型五相混合式步進電機驅動器.該驅動器
2011-03-07 12:15:26
如何控制步進電動機的角位移量
來控制電機的角位移量,從而達到精確定位的目的;同時還可以通過控制脈沖頻率來控制電動機轉動的速度和加速度,從而達到調速的目的。一:線、相、極性“相” 就是說明步進電...
2021-08-31 07:39:02
常見的電動機故障有哪些?
影響散熱效果,致使電動機過熱,所以要及時鏟除堵塞物,改善散熱條件。 4、電動機工作動態反常 電動機正常工作時,動態是均勻的、無雜音,當出現軸承損壞、斷相工作表象時,就會宣告反常的、乃至是尖銳的響聲
2015-08-15 14:59:40
應用LABVIEW軟件建立虛擬儀器測量程序,設計一套五相感應電動機的線(相)電壓、電流、有功功率、無功功率測量系統
多相感應電動機廣泛應用于重載、船舶驅動場合,可以降低每相功率的等級,有利于多相變頻器電氣電子元器件的選擇與運行,且可以在有一相出現故障時可以斷開故障相繼續運行。五相感應電動機是一種典型的多相電機。五
2020-06-18 20:07:56
控制步進電動機
單位要改造儀器,由于原來的電動機無法滿足低速的時候,達到需要的扭矩的大小,需要改造,步進電動機是個不錯的選擇,現在有2個方案,一個是用labview做上位機編寫脈沖源,通過串口程序連接步進電動機
2014-05-03 19:09:58
永磁電動機的結構形式是什么樣?
永磁電動機的形式有:(1)矩形脈沖波電流,永磁無刷直流電動機PMBDC具有矩形脈沖波電流。(2)正弦波電流,永磁磁阻同步電機PSM具有正弦波電流。(3)混合式永磁電機。
2019-09-24 09:11:26
菜鳥 求助
pic單片機 驅動 57BYGH56 1.2N 兩相混合式 或 87步進電動機,外圍電路需要什么電子元件?怎么連接?用5個I/O口引出排針引出控制得不?還需要其他元件嗎?有詳細原理圖嗎?剛學pic單片機,沒連接過電動機外圍電路,求助各位高手,謝謝!
2011-04-25 18:24:43
請問ULN2003是如何驅動步進電機28BYJ-48的?
ULN2003是如何驅動步進電機28BYJ-48的?四相步進電機有哪幾種常見的通電方式?什么是步進電機?步進電機分為哪幾種?什么是DETENT TORQUE?如何克服兩相混合式步進電機在低速運轉
2021-10-13 09:04:55
步進電動機的應用實例
步進電動機概述步進電動機工作原理及線性解析步進電動機的研究設計計算方法步進電動機動態特性的基礎理論步進電動機的驅動步進電動機的環境分配器步進電
2007-11-16 23:41:48 714
714
714三相混合式步進電機驅動器B3C的工作原理
三相混合式步進電機驅動器B3C的工作原理根據正弦電流細分驅動的原理,設計出三相混合式細分型步進電機驅動器,系統采用電流跟蹤和脈寬調制技術,使電機的相電流為相位相
2008-12-19 01:36:33136
136集成位置傳感器用于混合式步進電動機位置的檢測
混合式步進電動機伺服系統轉子的位置檢測,可以用傳統的外配位置傳感器或基于理論算法的無位置傳感器方案,但是存在許多問題。文章給出了一種新型的集成位置傳感器的設計
2009-06-23 09:21:2022
22兩相混合式步進電機驅動芯片BY-5064使用說明
兩相混合式步進電機驅動芯片BY-5064使用說明:BY-5064是一款小型化、高細分、多功能、使用方便的兩相混合式步進電機驅動芯片,配合簡單的外圍電路即可實現高性能的驅動電路。該
2009-09-29 10:41:5163
63THB6128中文資料,pdf (高細分兩相混合式步進電機驅
THB6128 高細分兩相混合式步進電機驅動芯片:一、特性:●雙全橋MOSFET驅動,低導通電阻Ron=0.55Ω●最高耐壓36VDC,大電流2.2A(峰值)●多種細分可選(1、1/2、1/4、1/8、1/1
2009-10-27 18:29:42259
259二相混合式步進電機驅動器的優化設計
二相混合式步進電機驅動器的優化設計:從 改善步進電機動靜態性能的角度出發,給出了基于8051的二相混合式步進電機驅動器的優化設計方案,主要介紹了系統結構、通訊策略、
2010-01-14 09:44:21100
100SH-20403兩相混合式步進電機細分驅動器
SH-20403兩相混合式步進電機細分驅動器
驅動器內部的開關電源設計保證了可以適應較寬的電壓范圍,用戶可根據各自的情況在10V到40V DC之間選擇。
2010-05-11 11:59:29138
138CPLD器件在兩相混合式步進電動機驅動器中的應用
文章詳細介紹了一種以Xilinx 公司生產的CPLD 器件XC9536 為核心來產生電機繞組參考電流, 進而實現具有繞組電流補償功能的兩相混合式步進電動機10 細分和50 細分運行方式的方法。
2010-10-27 15:31:5754
54
三相混合式多細分步進電機驅動器
三相混合式多細分步進電機驅動器
本文根據正弦電流細分驅動的原理,設計出三相混合式多細分步進電機驅動器。系統采用電流跟跟蹤和脈寬調制技術,使用電機的相
2010-02-22 10:58:09 2133
2133
2133
混合式步進電動機的諧波電磁轉矩分析
研究了五相混合式 步進電動機 的不對稱性, 分析了不對稱性與3 次諧波電流對電動機諧波電磁轉矩的影響, 提出了不對稱性可在電動機的反電動勢中體現, 且導致電動機產生較大的2 次諧
2011-08-17 18:09:5735
35基于L297的混合式步進電機驅動器的研制
在分析了步進電機的驅動特性和斬波恒流細分驅動原理和混合式步進電機驅動芯片L297/298的性能、結構的基礎上,結合8751單片機,設計出了混合式步進電機驅動器.實測表明,此細分
2011-09-27 16:25:0674
74
基于STM32F103RB的兩相混合式步進電機細分驅動器設計
根據兩相混合式步進電機細分驅動原理,設計了一種基于STM32F103RB單片機的、細分度可調的步進電機驅動器。控制器采用電流矢量控制算法,通過雙H橋驅動步進電機的兩相轉子。利用片
2012-06-13 14:29:36239
239基于FPGA的二相混合式步進電機控制系統
隨著現代衛星載荷探測功能日益增強,對電機等活動部件的壽命與可靠性提出更高要求。步進電機自身具有體積小、質量輕、易于控制、誤差不積累、可靠性高等優點,適合充當星上載荷活動部件。本文中使用一款兩相混合式
2017-11-07 09:21:460
0HB型混合式步進電機的結構和工作原理詳解
混合式(即HB型)步進電機有兩相、三相、五相式,轉子因與相數無關,而采用相同轉子,本文以兩相HB型混合式步進電機為例加以說明。HB型的名稱由其轉子結構得來,其轉子是PM型永磁步進電機與VR型變磁阻
2018-04-25 10:04:0519114
19114一文看懂HB混合式步進電機與相數、轉子齒數、主極數的關系
混合式步進是指混合了永磁式和反應式的優點,分為兩相和五相,兩相步進角一般為1.8度而五相步進角一般為 0.72度,這種步進電機的應用最為廣泛。本文主要解析HB型混合式步進電機與相數、轉子齒數、主極數的關系,首先介紹的是步進電機相數、轉子齒數和主極數的表達式,其次介紹了相內及相間磁路的一般形式。
2018-04-25 10:23:1615161
15161
什么是混合式步進電機_混合式步進電機和反應式步進電機的區別
轉動一個固定的角度(即步進角)。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的。那么什么是混合式步進電機,混合式步進電機和反應式步進電機有什么區別嗎?接下來跟隨小編詳細的來了解一下混合式步進電機。
2018-04-25 10:59:1115747
15747步進電動機的作業原理圖
繞組,構成三對磁極;轉子上則均勻散布著4個齒。步進電動機選用直流電源供電。當U、V、W三相繞組輪番轉電時,經過電磁力的招引,步進電動機轉子一步一步地旋轉。
2020-04-19 09:10:151459
1459設計 | 兩相混合式步進電機H橋驅動電路設計原理
H橋功率驅動電路可應用于步進電機、交流電機及直流電機等的驅動。永磁步進電機或混合式步進電機的勵磁繞組都必須用雙極性電源供電,也就是說繞組有時需正向電流,有時需反向電流,這樣繞組電源需用H橋驅動。本文以兩相混合式步進電機驅動器為例來設計H橋驅動電路。
2021-01-31 06:21:3529
29
步進電機驅動器的分類及模塊
。對步進電動機驅動器的研究幾乎是與步進電動機的研究同步進行的 步進電機驅動器模塊 1、爬山復位 2、自動控制 3、手動微調 4、方向和限位處理 5、邏輯輸出 步進電機驅動器的分類 1.永磁式步進電動機 2.兩相混合式步進電機驅動器 3.三相
2021-10-02 18:10:009033
9033伺服電動機控制技術與步進電動機的區別
量是電動機的轉角或速度、力矩。伺服電動機有直流電動機和交流電動機、直線電動機和混合式伺服電動機也都是閉環控制系統,也屬于伺服電動機。
2022-11-01 14:17:43776
776混合式步進電機的結構和工作原理
此前已經以PM型步進電機為例介紹了步進電機的工作。本文將介紹當今應用廣泛的混合式步進電機的結構和工作原理。混合式步進電機的結構,混合式步進電機是兼具VR型和PM型電機優點的步進電機。
2023-02-24 09:51:101218
1218
兩相混合式步進電機的工作原理
兩相混合式步進電機的物理結構通常情況下一般主要分為定子和轉子。其軸向結構如圖 2-4所示。定子結構的部分有鐵芯和繞組等有關組成而轉子結構的部分有鐵芯和轉軸。通過磁體產生的磁場,將兩段鐵芯磁化成兩極性,都各有50個小齒,而且在設計時錯開了1/2齒。
2023-03-01 10:09:021778
1778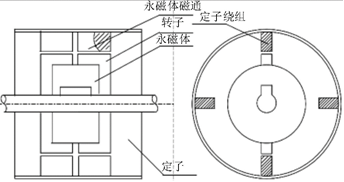
混合式步進電機工作原理及特點
混合式步進電機(Hybrid Stepper Motor)是目前應用較廣泛的一種步進電機,其工作原理是將永磁式和可變磁阻式兩種原理結合在一起。
混合式步進電機的轉子由多個磁極組成,通常
2023-03-08 16:10:341801
1801混合式步進電機本體建模
兩相混合式步進電機數學模型 式中 Ls為自感,它與轉子的機械角位置 θ 有關。 由于混合式步進電機中磁芯造成很大的氣隙, 其可變磁阻對于輸出總力矩的貢獻可以忽略,式 (2)作為單相繞組等效電路
2023-03-22 09:52:400
0二相混合式步進電機閉環矢量控制simulink仿真
目錄在位置跟蹤伺服系統中二相混合式步進電機閉環矢量控制simulink仿真 閉環矢量控制系統simulink圖? 閉環矢量控制系統系統結構框圖 二相混合式步進電機的數學模型 矩角特性 電壓方程
2023-03-24 10:30:591
1反應式步進電機與混合式步進電機的區別
反應式步進電機與混合式步進電機的區別如下:
1、在結構和材料上不同,混合式電機內部具有永久磁性材料,故混合式電機有自阻(即在電機未加電的情況下有一定的自鎖力),而反應式電機沒有自阻。
2、在運行性能上有差別,混合式電機運行時相對較平穩,輸出力矩相對較大,運行聲音小。
2023-03-27 15:42:33745
745常見的兩相混合式步進電機應用
的品種也非常繁多。對于工業應用來說,每轉 200 步的兩相混合式步進電機最為常見。這里的 “混合” 是指它利用永磁體和帶齒鐵轉子的工作方式(例如可變磁阻電機),而 “200 步” 則指電機每步移動 1.8°,該步數為轉子和定子上齒數的函數
2023-08-23 15:22:55714
714
混合式步進電機的結構圖
混合式步進電機(Hybrid Stepper Motor)結合了永磁式和變極式步進電機的特點,以實現高性能和高可靠性。 合式步進電機融合了可變磁阻(VR)型步進電機和永磁(PM)型步進電機的優勢
2024-02-06 10:01:46236
236





 工商網監
工商網監
評論