 電子發(fā)燒友App
電子發(fā)燒友App


?
隨著移動(dòng)通信技術(shù)的飛速發(fā)展,在目前的城市環(huán)境中,移動(dòng)通信基站數(shù)目在不斷地增長(zhǎng),并且大量采用了微蜂窩及微微蜂窩移動(dòng)通信系統(tǒng)。在這些通信系統(tǒng)中建筑物的反射、衍射等會(huì)造成電波傳播的多徑效應(yīng)。蜂窩面積越小,在網(wǎng)絡(luò)設(shè)計(jì)、場(chǎng)強(qiáng)預(yù)測(cè)、干擾分析時(shí)就越要更多地考慮基站周邊建筑物的影響。由于城市中基站周邊環(huán)境的復(fù)雜性和多變性,傳統(tǒng)的統(tǒng)計(jì)模型已經(jīng)基本失效,而以射線跟蹤為代表的確一定模型正是處理這一問(wèn)題的有效方法。
??? 射線跟蹤有正向算法和反向算法兩種,正向算法簡(jiǎn)單,效率高,但誤差較大。反向算法比正向算法效率低,復(fù)雜度大,但其精度高。本文是基于反向射線跟蹤算法進(jìn)行三維路徑搜索的研究,進(jìn)而建立起精確的城市小區(qū)電磁環(huán)境預(yù)測(cè)系統(tǒng)。
??? 在建立城市小區(qū)電磁環(huán)境精確預(yù)測(cè)系統(tǒng)中,關(guān)鍵技術(shù)有3個(gè)方面,三維建筑物數(shù)據(jù)模型的建立,到達(dá)接收點(diǎn)的所有確定路徑的搜索和場(chǎng)強(qiáng)的計(jì)算。本文主要從這3個(gè)方面分別作以介紹。
1 三維建模
??? 本文所研究的三維路徑搜索方法是建立在確定數(shù)據(jù)結(jié)構(gòu)的三維建筑物模型的基礎(chǔ)上,考慮到普通計(jì)算機(jī)計(jì)算能力及該預(yù)測(cè)系統(tǒng)計(jì)算成本,我們將建筑物的外表面都考慮成平面。假定所建的三維建筑物模型能夠動(dòng)態(tài)地存儲(chǔ)不包括底面的其他所有的面結(jié)構(gòu)及不包含在底面內(nèi)的所有的棱結(jié)構(gòu),并將其存儲(chǔ)(而這些在三維建模時(shí)是能夠做到的)。面的數(shù)據(jù)結(jié)構(gòu)包括4個(gè)頂點(diǎn)信息及其法向量,棱的數(shù)據(jù)結(jié)構(gòu)包括2個(gè)端點(diǎn)及其所在的2個(gè)面。由于要考慮地面反射影響,需另外存儲(chǔ)一個(gè)有限大的平面,假定1 000 m(長(zhǎng))x1 000 m(寬)作為小區(qū)地面信息。每建立一個(gè)建筑物模型,都依次存儲(chǔ)以上信息,則小區(qū)內(nèi)建筑物模型的所有面結(jié)構(gòu)和棱結(jié)構(gòu)都被存儲(chǔ)。
2 路徑搜索
??? 反向射線追蹤算法中,考慮到電波的衰減特性,本論文只考慮二次以下的反射及繞射的路徑搜索,而忽略三次及以上的反射及繞射路徑。二次以下的反射及繞射路徑主要有以下幾種情形:一次反射,一次繞射,一次反射加一次繞射,一次繞射加一次反射,二次反射,二次繞射。
??? 下面分別對(duì)以上6種路徑的搜索方法加以介紹。所有的搜索都是基于三維空間的。
2.1 一次反射
??? 如圖1所示,已知源點(diǎn)Tx,場(chǎng)點(diǎn)Rx,搜索一次反射路徑的步驟為:

??? 1)Tx的鏡像點(diǎn)為Tx’,連接Tx’與Rx交平面S于R點(diǎn),即R點(diǎn)為反射點(diǎn)。Tx-R-Rx即為一條一次反射路徑;
??? 2)判斷該路徑有效性(兩條件必須同時(shí)具備):
??? ①Tx-R之間,R-Rx之間沒(méi)有建筑物遮擋;
??? ②反射點(diǎn)在平面S內(nèi)。
??? 3)如果該路徑有效,將其存儲(chǔ)在一次反射路徑子目錄
??? 4)從發(fā)射源點(diǎn)對(duì)三維建筑物模型中存儲(chǔ)的所有面作鏡像點(diǎn),進(jìn)而找到關(guān)于所有面的反射點(diǎn),再判斷其有效性,將所有的有效路徑存儲(chǔ)在
2.2 一次繞射
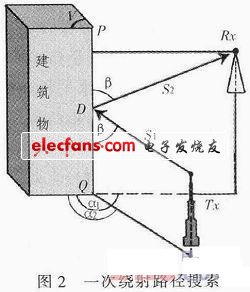
??? 由Keller的繞射場(chǎng)概念得出,尖劈的繞射線與尖劈直邊緣線的夾角等于入射線與直邊緣線的夾角。如圖2所示,已知源點(diǎn)Tx,場(chǎng)點(diǎn)Rx,搜索一次繞射的路徑的步驟為:
?
1)若棱PQ為三維數(shù)據(jù)庫(kù)模型中所存儲(chǔ)的一條棱,假設(shè)繞射點(diǎn)D存在,則![]() ,由幾何繞射理論可知,∠TxDQ=∠RxDP,通過(guò)向量?jī)?nèi)積運(yùn)算,可以求出λ的值。即可得到:D點(diǎn)的坐標(biāo)=
,由幾何繞射理論可知,∠TxDQ=∠RxDP,通過(guò)向量?jī)?nèi)積運(yùn)算,可以求出λ的值。即可得到:D點(diǎn)的坐標(biāo)=![]() ;
;
??? 2)判斷D點(diǎn)有效性(兩個(gè)條件必須同時(shí)具備)
??? ①Tx-D,D-Rx之間分別沒(méi)有建筑物遮擋;
??? ②D點(diǎn)在線段PQ上。
??? 3)如果D點(diǎn)有效,Tx-D-Rx則為一條有效的一次繞射路徑;
??? 4)遍歷模型中所存儲(chǔ)的所有棱,找到所有符合條件的一次繞射路徑,將這些路徑存儲(chǔ)在子目錄
?
2.3 一次反射加一次繞射
??? 如圖3所示,已知源點(diǎn)Tx,場(chǎng)點(diǎn)Rx,棱PQ,面S分別為三維建筑物數(shù)據(jù)庫(kù)模型中所存儲(chǔ)的一條棱和一個(gè)面,搜索一次反射加一次繞射路徑的步驟為:
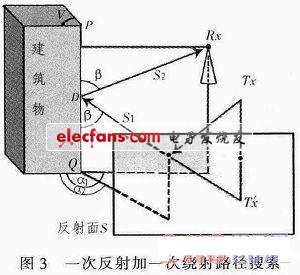
??? 1)作源點(diǎn)Tx的鏡像點(diǎn)Tx’;
??? 2)將Tx’作為源點(diǎn),Rx作為接收點(diǎn),運(yùn)用一次繞射的求法求出在棱pq上的衍射點(diǎn)D;
??? 3)連接Tx’D,與平面S的交點(diǎn)即為反射點(diǎn)R;
??? 4)判斷R,D的有效性(兩個(gè)條件必須同時(shí)滿足):
??? ①R在平面S內(nèi),D在線段PQ上;
??? ②兩點(diǎn)Tx-R,R-D,D-Rx之間分別都沒(méi)有建筑物遮擋。
??? 5)若R,D點(diǎn)有效,則Tx-R-D-Rx,則為一條有效的一次反射加一次繞射路徑;
??? 6)遍歷模型中所存儲(chǔ)的所有面和棱,找到所有的這樣的路徑,存儲(chǔ)在子目錄
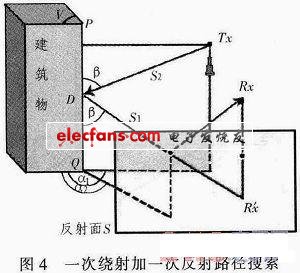
2.4 一次繞射加一次反射
??? 如圖4所示,已知源點(diǎn)Tx,場(chǎng)點(diǎn)Rx,棱PQ,面S分別為三維建筑物數(shù)據(jù)庫(kù)模型中所存儲(chǔ)的一條棱和一個(gè)面,搜索一次繞射加一次反射路徑的步驟與3.3節(jié)中所求路徑相似,只是所有光路反向,即將Tx,Rx互換位置,先找到Rx的鏡像點(diǎn)Rx’,進(jìn)而找到衍射點(diǎn)D,然后再找到反射點(diǎn)R,若D,R均有效,則Tx—D—R—Rx為一條有效一次繞射加一次反射路徑,遍歷模型中所存儲(chǔ)的所有棱和面,找到所有的這樣的路徑,存儲(chǔ)在子目錄
?
2.5 二次反射
??? 如圖5所示,已知源點(diǎn)Tx,接收點(diǎn)Rx,取模型中所存儲(chǔ)的任意兩個(gè)面S1,S2,求二次反射路徑的步驟為:
?

??? 1)作源點(diǎn)Tx關(guān)于平面S1的鏡像點(diǎn)Tx’,作Tx’關(guān)于平面S2的鏡像點(diǎn)Tx”;
??? 2)連接Tx”、Rx交平面S2于R2點(diǎn)(反射點(diǎn));
??? 3)連接Tx’,R2交平面S1于R1點(diǎn)(反射點(diǎn));
??? 4)判斷R1,R2的有效性(兩個(gè)條件必須同時(shí)滿足):
??? ①R1,R2分別在平面S1,和S2內(nèi);
??? ②兩點(diǎn)Tx-R1,R1-R2,R2-Rx之間分別都沒(méi)有建筑物遮擋。
??? 5)若R1,R2均有效,則Tx-R1-R2-Rx為一條有效的二次反射路徑;
??? 6)遍歷模型中所有的平面,找到所有符合上述條件的路徑,將其存儲(chǔ)在子目錄
2.6 二次衍射
??? 如圖6所示,已知源點(diǎn)Tx,接收點(diǎn)Rx,取模型中所存儲(chǔ)的任意兩個(gè)棱l,PQ。由Tx向地面作出的垂直線和棱l所確定的平面S1,棱l和棱PQ定的平面S2,棱PQ和由Rx向地面作出的垂直線確定的平面S3,由幾何繞射理論可知,發(fā)生二次繞射時(shí),S1、S2、S3這3個(gè)平面能夠展開在一個(gè)平面內(nèi),則求二次衍射路徑的步驟為:
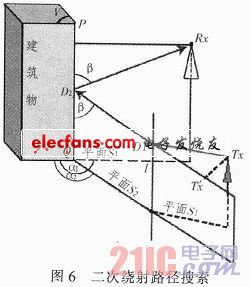
??? 1)作源點(diǎn)Tx關(guān)于平面S2的垂足Tx’;
??? 2)將Tx’作為源點(diǎn),Rx作為接收點(diǎn),按照一次衍射的路徑搜索方法,找到關(guān)于棱PQ的衍射點(diǎn)D2,連接Tx’D2交棱l于D1點(diǎn);
??? 3)判斷D1,D2的有效性:
??? ①D1,D2分別在棱l,棱PQ上;
??? ②兩點(diǎn)Tx-D1,D1-D2,D2-Rx之間分別都沒(méi)有建筑物遮擋。
??? 4)若D1,D2,則Tx-D1-D2-Rx為一條有效的二次繞射路徑:
??? 5)遍歷模型中的所有棱,找到所有符合上述條件的路徑,將其存儲(chǔ)在
??? 以上即為本文所研究的路徑搜索方法,該方法運(yùn)用三維掃描技術(shù),不論發(fā)射天線比周圍建筑物高,還是低,也無(wú)論是在垂直于地面的棱,還是在平行于地面的棱發(fā)生繞射都能計(jì)算,方法精確,簡(jiǎn)單,運(yùn)算量不大,比較適合面積較小,建筑物數(shù)量不是很多的城市小區(qū),是一種有效的路徑搜索方法。
3 場(chǎng)強(qiáng)計(jì)算
??? 路徑搜索完成后,可以根據(jù)所得的所有傳播路徑來(lái)進(jìn)行場(chǎng)強(qiáng)的計(jì)算。根據(jù)路徑性質(zhì)的不同,我們將計(jì)算分為直射場(chǎng)強(qiáng)、反射場(chǎng)強(qiáng)和繞射場(chǎng)強(qiáng)3個(gè)部分。
?
3.1 直射場(chǎng)強(qiáng)
??? 直射波場(chǎng)強(qiáng)的計(jì)算比較簡(jiǎn)單,公式如下:
????![]()
??? 式(1)中,PT是發(fā)射天線的輻射功率,CT是發(fā)射天線的增益,r是發(fā)射點(diǎn)與接收點(diǎn)之間的距離,F(xiàn)(θ,φ)是發(fā)射天線方向圖函數(shù)。
3.2 反射場(chǎng)強(qiáng)
??? 反射波場(chǎng)強(qiáng)公式為:
????
??? 式(2)中,E(Rx)⊥和E(Rx)∥分別表示反射波末場(chǎng)也就是場(chǎng)點(diǎn)場(chǎng)強(qiáng)的垂直極化分量和水平極化分量,![]() 分別是入射波在反射點(diǎn)處場(chǎng)強(qiáng)的垂直極化分量和水平極化分量。R⊥和R∥分別為反射系數(shù)的垂直極化和水平極化分量,
分別是入射波在反射點(diǎn)處場(chǎng)強(qiáng)的垂直極化分量和水平極化分量。R⊥和R∥分別為反射系數(shù)的垂直極化和水平極化分量,![]() 是電波從源點(diǎn)傳到反射點(diǎn)再傳到場(chǎng)點(diǎn)的相位積累,s1,s2分別表示從源點(diǎn)到反射點(diǎn)的距離,A(s2)從反射點(diǎn)到場(chǎng)點(diǎn)的距離,是從反射點(diǎn)到場(chǎng)點(diǎn)的振幅擴(kuò)散因子。其中,入射波的末場(chǎng)
是電波從源點(diǎn)傳到反射點(diǎn)再傳到場(chǎng)點(diǎn)的相位積累,s1,s2分別表示從源點(diǎn)到反射點(diǎn)的距離,A(s2)從反射點(diǎn)到場(chǎng)點(diǎn)的距離,是從反射點(diǎn)到場(chǎng)點(diǎn)的振幅擴(kuò)散因子。其中,入射波的末場(chǎng)![]() 可以直接由直射場(chǎng)強(qiáng)公式(1)求出,A(s2)定義為:
可以直接由直射場(chǎng)強(qiáng)公式(1)求出,A(s2)定義為:
??? 式(4)中,θ為入射角和反射角,ε為反射面媒質(zhì)的等效電參數(shù),定義為ε=εr-j60σλ,其中,εr為反射面媒質(zhì)的相對(duì)介電常數(shù),σ為其電導(dǎo)率,λ為入射波的波長(zhǎng)。
3.3 繞射場(chǎng)強(qiáng)
??? 繞射波場(chǎng)強(qiáng)公式為:
????![]()
??? 式(5)中,![]() 分別是繞射波末場(chǎng)也就是場(chǎng)點(diǎn)處場(chǎng)強(qiáng)的垂直極化分量和水平極化分量;
分別是繞射波末場(chǎng)也就是場(chǎng)點(diǎn)處場(chǎng)強(qiáng)的垂直極化分量和水平極化分量;![]() 分別是入射波在繞射點(diǎn)處場(chǎng)強(qiáng)的垂直極化分量和水平極化分量;De表示垂直于入射面極化的電場(chǎng)分量的自繞射系數(shù);Dm表示平行于入射面極化的電場(chǎng)分量的自繞射系數(shù):
分別是入射波在繞射點(diǎn)處場(chǎng)強(qiáng)的垂直極化分量和水平極化分量;De表示垂直于入射面極化的電場(chǎng)分量的自繞射系數(shù);Dm表示平行于入射面極化的電場(chǎng)分量的自繞射系數(shù):![]() 是電波的相位積累,Ad(S2)是描述衰減的振幅擴(kuò)散因子。s1,s2分別表示從源點(diǎn)到繞射點(diǎn)的距離,從繞射點(diǎn)到場(chǎng)點(diǎn)的距離。? De,Dm的計(jì)算參閱文獻(xiàn)。式(5)中
是電波的相位積累,Ad(S2)是描述衰減的振幅擴(kuò)散因子。s1,s2分別表示從源點(diǎn)到繞射點(diǎn)的距離,從繞射點(diǎn)到場(chǎng)點(diǎn)的距離。? De,Dm的計(jì)算參閱文獻(xiàn)。式(5)中
????![]()
4 實(shí)例計(jì)算
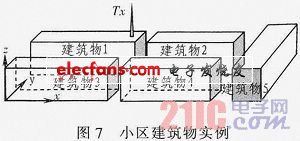
??? 以鄭州大學(xué)新校區(qū)柳園22號(hào)樓鄭大招待所基站(如圖7的建筑物4上)為例進(jìn)行建模計(jì)算,建筑物4的尺寸為58.3 m(長(zhǎng))×16.86 m(寬)x21.9 m(高),基站周圍建筑物1的尺寸為47.75 m(長(zhǎng))×10.2 m(寬)x20.92 m(高),建筑物2的尺寸為58.3 m(長(zhǎng))×16.3 m(寬)x21.92 m(高),建筑物3的尺寸為56 m(長(zhǎng))×16.86 m(寬)×20 m(高),建筑物5的尺寸為55 m(長(zhǎng))×134 m(寬)x14.53 m(高),天線架高37 m,增益
為17 dB,發(fā)射功率為20 W,發(fā)射頻率為960 MHz,接收點(diǎn)高1.65 m,建筑物的等效電參數(shù)為,εrL=5,σL=0.002 s/m。
?
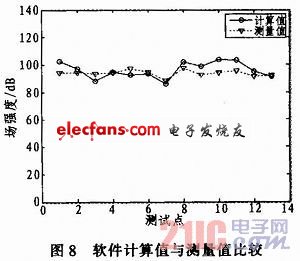
??? 計(jì)算值與實(shí)驗(yàn)測(cè)量值有一定的誤差,如圖8所示,這是由于天氣環(huán)境的原因,忽略周圍汽車、電線桿等障礙物信息等因素引起。但誤差是在允許范圍之內(nèi)(一般不超過(guò)±6 dB),總體能夠很好地預(yù)測(cè)通信基站附近城市小區(qū)任意場(chǎng)點(diǎn)的電場(chǎng)強(qiáng)度。
5 結(jié)論
??? 本文詳細(xì)地介紹了反向射線跟蹤的三維路徑搜索方法與步驟,場(chǎng)強(qiáng)的計(jì)算方法,并用所編寫的軟件進(jìn)行實(shí)際小區(qū)三維建模、測(cè)試點(diǎn)場(chǎng)強(qiáng)計(jì)算,計(jì)算值與測(cè)量值基本符合。但是,為了進(jìn)一步提高預(yù)測(cè)系統(tǒng)的精確度,建筑物模型的處理及建筑物參數(shù)的計(jì)算都是需要改進(jìn)的地方。







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論