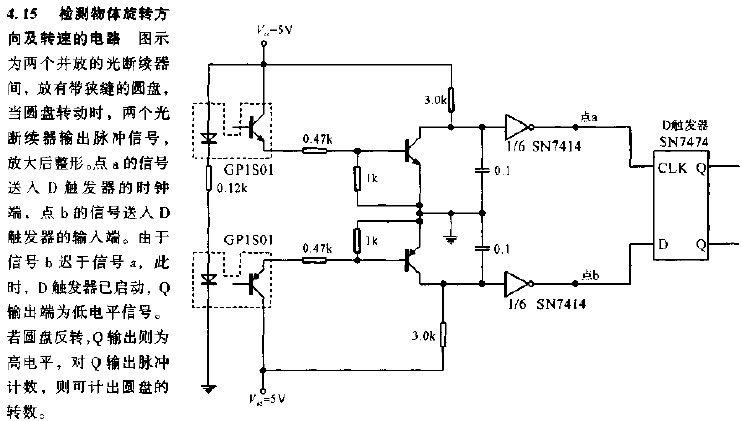
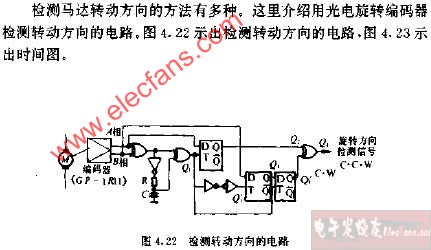
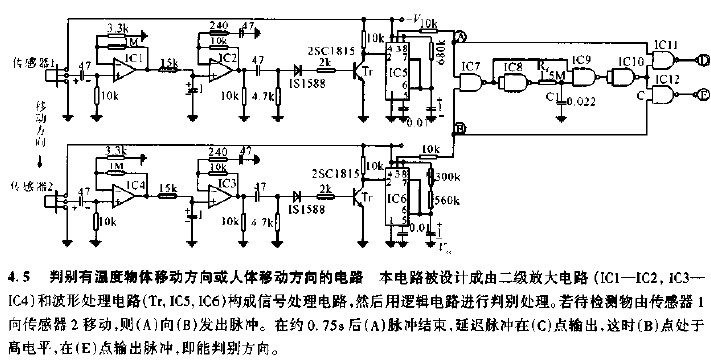
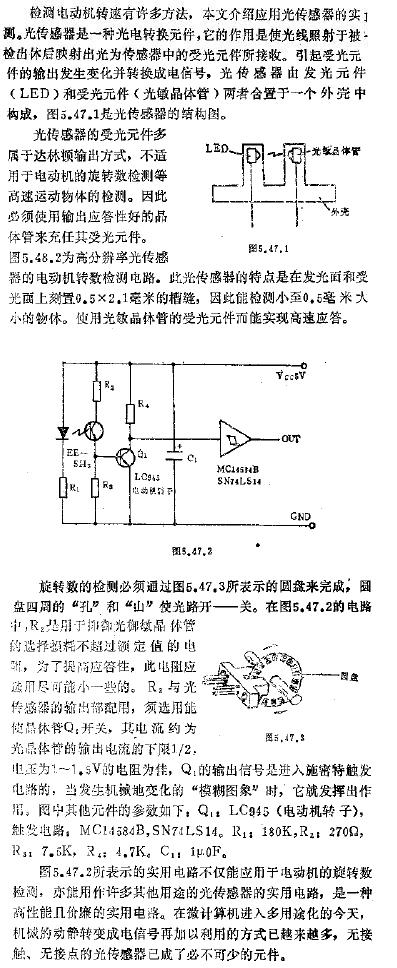
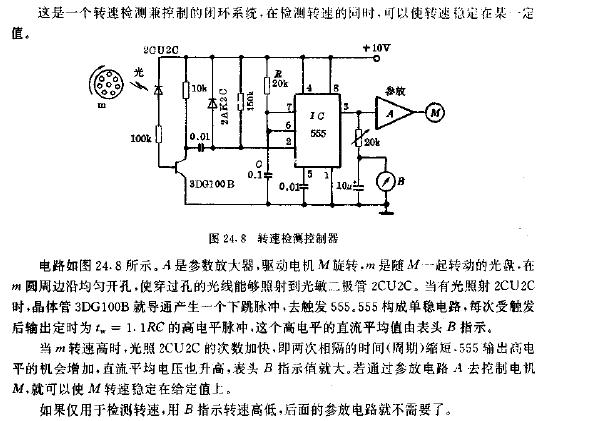
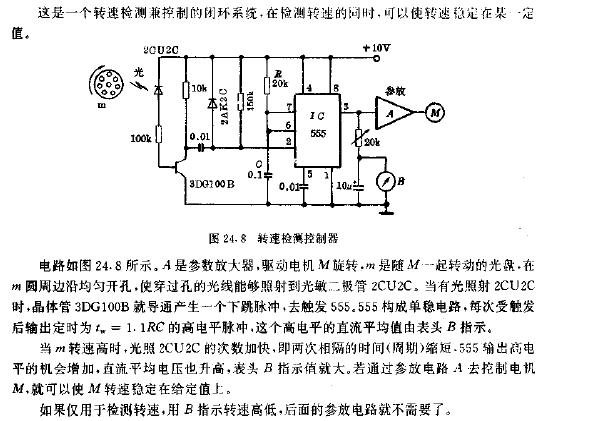
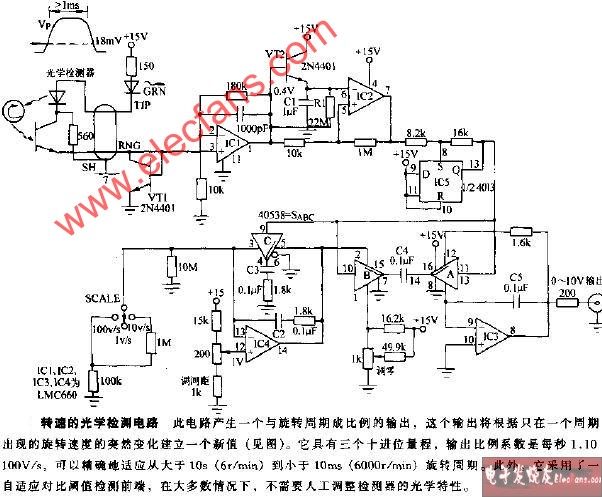
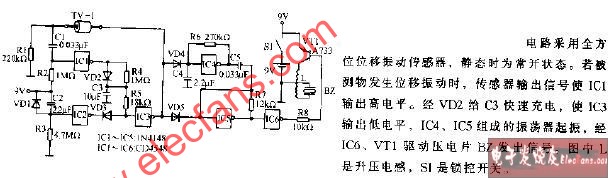
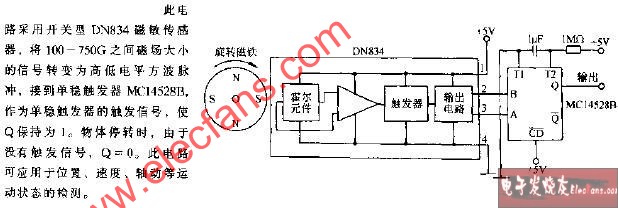
檢測(cè)物體旋轉(zhuǎn)方向及轉(zhuǎn)速的電路
 電子發(fā)燒友App
電子發(fā)燒友App

硬聲App

完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)>電子技術(shù)應(yīng)用>電子技術(shù)>電路圖>電工基礎(chǔ)電路圖>檢測(cè)物體旋轉(zhuǎn)方向及轉(zhuǎn)速的電路
相關(guān)推薦
 39386
39386 994
994 252
252 3014410
3014410
 12160162195
12160162195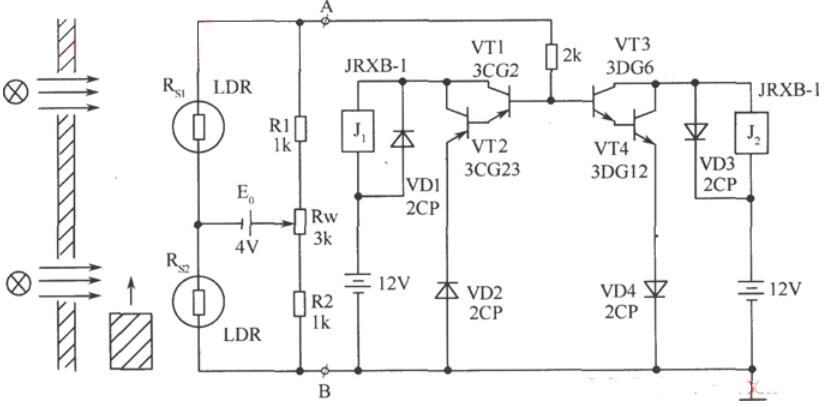 7321552671292011865
7321552671292011865 355693706088
355693706088 1514
1514 259920821641
259920821641 6738533670
6738533670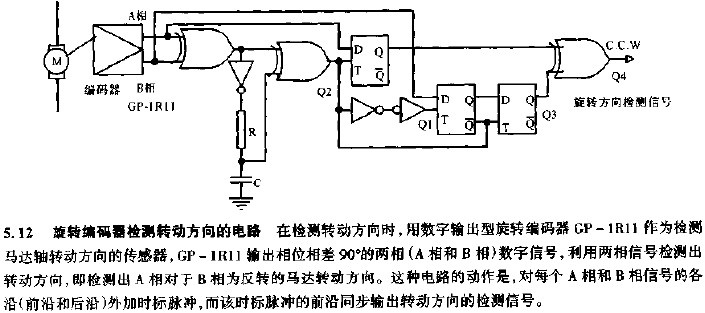
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
關(guān)注我們的微信
下載發(fā)燒友APP
電子發(fā)燒友觀察





評(píng)論