 電子發燒友App
電子發燒友App


一、前言
隨著汽車市場的保有量連續多年的高速增長,人們對于汽車駕駛安全技術的要求也越來越高,尤其是主動安全技術。無論是如今應用廣泛的防抱死系統(Antilock Brake System,ABS)、車身電子穩定系統(Electronic Stability Program,ESP),還是逐漸興起的高級駕駛輔助系統(Advanced Driver Assistance System,ADAS), 汽車防撞預警系統(Forward Collision Warning System,FCWS),都需要準確地獲取當前輪速,或者通過汽車ECU對輪速信號進行邏輯計算估算出汽車速度。
本文主要是對市場主流的輪速傳感器工作原理和信號特征進行分析說明,在此基礎上,針對性地對輪速傳感器應用進行實例介紹,同時對輪速傳感器的發展做出展望。
二、輪速信號的采集
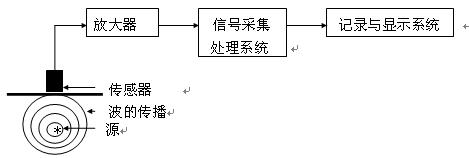
輪速信號的采集過程實際上可以看作是對旋轉件的測速過程。轉速測量常用的光電式、電渦流式和電磁式等也曾應用于汽車輪速信號的測量。相比較而言,電磁式輪速傳感器工作可靠,價格合適,受環境因素(如溫度、灰塵等)的影響較小,基于以上優點,電磁式輪速傳感器在輪速信號的采集中應用廣泛。
電磁式輪速傳感器大致分為電感式、霍爾式和磁阻式三種類型。其中,電感式輪速傳感器是被動式輪速傳感器,又稱無源輪速傳感器;相對應的,霍爾式和磁阻式輪速傳感器是主動式輪速傳感器,也稱有源輪速傳感器,有一個電源電路為傳感器提供外部電壓供電,在外部供電無法提供時,主動式輪速傳感器將無輪速信號產生。
1、電感式輪速傳感器
電感式輪速傳感器基于電磁感應原理,利用電磁感應把被測對象的運動轉換成線圈的自感系數和互感系數的變化,再由電路轉換為電壓或電流的變化量輸出,實現非電量到電量的轉換。由電磁感應定律可知,通過回路面積的磁通量發生變化時,回路中會產生感應電動勢,如公式(1)所示:
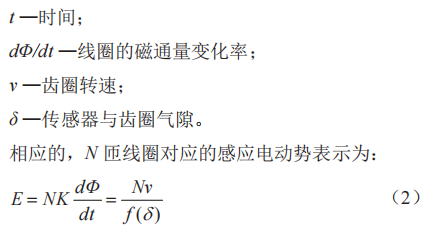
由式(1)、(2)可見,磁通量的變化決定了感應電動勢的輸出,磁通量的變化頻率決定了感應電動勢的輸出頻率。電感式輪速傳感器工作原理結構如圖1所示。
當車輪運動時,齒圈隨半軸轉動,齒圈的齒形變化引起齒圈與永久磁鐵間隙的變化,繼而對磁通量造成影響,感應線圈中的感應電動勢隨之變化。通過對輸出電勢的頻率統計,可知車輪轉速為:

P —系數,一般根據單位調整;
f —感應電動勢頻率;
z —齒數。
2、霍爾式輪速傳感器
霍爾式輪速傳感器基于霍爾效應,由霍爾組件結合電子元件組成,霍爾元件外加與電流方向垂直的磁場,在霍爾元件的兩端會產生電勢差,即霍爾電勢差。

式中,I —輸入電流;B —磁感應強度;n —自由電子濃度;e —電子電荷量;d —霍爾元件厚度;KH —霍爾系數,定義霍爾元件的靈敏度,僅與元件材料有關,為一常量。
由式(4) 可 見,UH、I和B三者確定其中兩個,另一個參數也就確定。
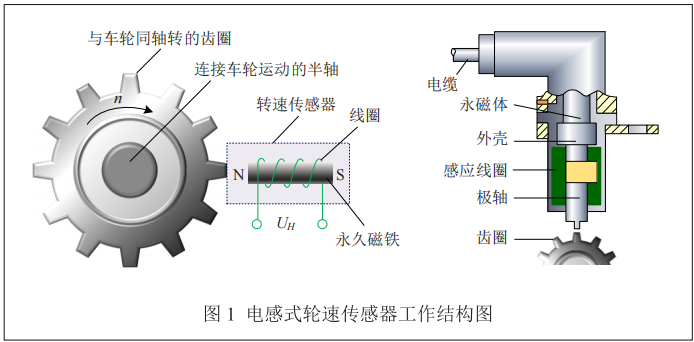
值得注意的是,自由電子濃度 n 受溫度影響較大,要注意消除溫度變化造成的影響。霍爾式輪速傳感器工作原理結構如圖2所示。
具有磁化軌道的轉軸或磁性軸用于產生磁場,永久背磁用于產生偏轉磁場。A和B可統稱為編碼器。
車輪運動時,編碼器轉動,霍爾式輪速傳感器檢測到編碼器的磁通量的大小變化。通常傳感器內部包含兩個霍爾元件,運動過程中產生具有一定相位差的波形,兩波形經差分放大,實現精度和靈敏度的提高。
車輪轉速也可用式(3)表示,其中 f 表示為霍爾電壓的信號頻率。
3、磁阻式輪速傳感器
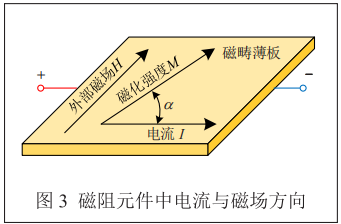
可變磁阻式輪速傳感器基于磁阻效應,與霍爾效應類似的是,在磁阻效應元件上接通電流和通過磁場,這里的磁場與電流成角度 α 設置,如圖 3,這樣磁場耦合到磁阻效應元件(一般為鐵磁材料制作的薄板,稱之為韋斯磁疇)方向的磁通量的變化率發生變化,從而改變元件的電阻(系數)。
當外部磁場與磁阻元件中的電流之間的夾角 α 發生變化時,磁阻元件電阻 R 變化,有:
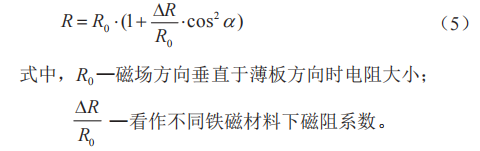
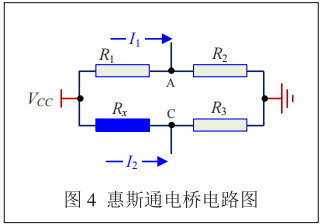
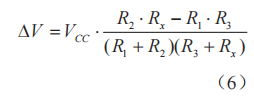
圖4中可以看到,當 α=90° 時,磁阻元件電阻 R最小;當 α=180°(0°)時,磁阻元件電阻 R 最大。磁阻元件一般后接電橋進行信號處理,惠斯通電橋如圖 4。磁阻元件做為Rx,根據電橋原理,Rx 的變化引起 R1 和 R3 兩端電壓差 ΔV 的變化,通過對 ΔV 實現對 Rx 變化率的放大。
與霍爾元件的信號處理類似,當需要消除零點漂移時可以做差分處理,磁阻元件可以通過添加磁阻元件以及調整電橋結構進行差分放大,一般常用的是采用六橋結構。
車輪轉速也可用式(3)表示,其中,f 表示為霍爾電壓的信號頻率。
三、輪速信號的處理
輪速信號采集后,還需要進行限幅、濾波等信號處理,從而使汽車 ECU 能夠使用更穩定有效的輪速信息。
1、輪速信號類型
輪速信號采集后,首先要區分輪速信號類型。輸出信號類型主要有以下四種,如圖5所示。
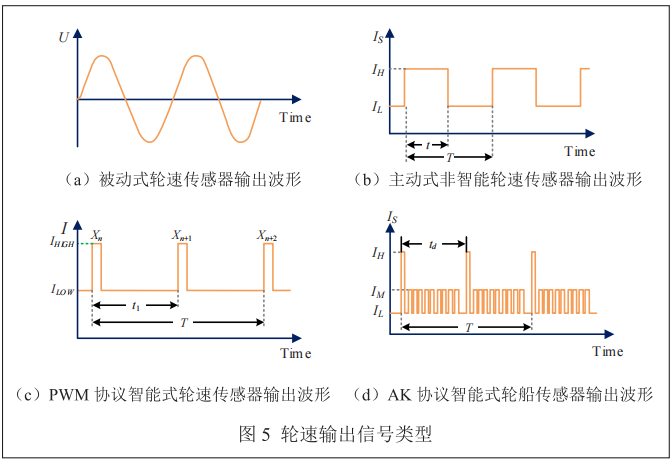
圖5(a)中表示被動式輪速傳感器的輸出波形,這是一種類似于正弦波的波形,其頻率、幅值的變化與氣隙(傳感器測試端外表面與靶目標間的距離)和編碼器的旋轉頻率有關。如某轎車實驗過程中,當氣隙固定為0.8mm,在車速為15km/h 時,輪速傳感器輸出信號頻率95Hz左右,電壓幅值0.5V左右;在車速為1205km/h 時,輪速傳感器輸出信號頻率761Hz 左右,電壓幅值5.3V左右。
圖5(b)、(c)、(d)中表示主動式輪速傳感器的輸出波形,一般采用霍爾元件或磁阻元件。
圖 5(b)表示高低電流交替進行的方波信號。一般來說,在傳感器允許的氣隙范圍內,方波信號的參數是基本一致的,或者說是有效的。這里的參數主要包括高電流 IH、低電流 IL 和占空比 t/T(一般為 50%),參數有效體現在數值處于一定區間內,這主要是由芯片性能確定,一般要求 IH 處于11.5mA~16.8mA,IL 處 于 5.7mA~9.6mA,占空比30%~70%。輸出參數穩定有效,與輪速傳感器相連接的處理單元才能夠有效識別出輪速。
圖5(c)、(d)中的傳感器相當于圖5(b)中傳感器的升級版,表現在通過一定的方式體現出轉速外更多的信息。
圖5(c)中方波Xn的脈寬相對于半周期t1較窄(這里要注意的是:相對于圖 5(b),PWM協議傳感器占空比也是50%的上下區間,但不是tx/t1,而是 t1/T),這是該類傳感器通過脈寬調制的方式輸出額外信息,包括安裝氣隙的變化、車輪的正反轉以及其他的警告信息。
圖5(d)中的電流輸出多出了一系列電流方波,這一類傳感器通過電流方波組成的序列提供了附加信息,包括氣隙儲備、車輪正反轉等。相對于PWM協議的輪速傳感器,AK 協議的輪速傳感器面對接近靜止的低速情況下,以及靜止情況(輪速為0)下具有更好的信息,體現在靜止情況下,AK協議中的輪速方波消失,但是后面9位的信息方波依然能夠輸出。
圖5(c)、(d)中的方波類型我們統稱為數據圖5(b)表示高低電流交替進行的方波信號。一般來說,在傳感器允許的氣隙范圍內,方波信號的參數是基本一致的,或者說是有效的。這里的參數主要包括高電流IH、低電流IL和占空比t/T(一般為 50%),參數有效體現在數值處于一定區間內,這主要是由芯片性能確定,一般要求IH處于11.5mA~16.8mA,IL處于5.7mA~9.6mA,占空比30%~70%。輸出參數穩定有效,與輪速傳感器相連接的處理單元才能夠有效識別出輪速。
圖5(c)、(d)中的傳感器相當于圖5(b)中傳感器的升級版,表現在通過一定的方式體現出轉速外更多的信息。圖5(c)中方波 Xn 的脈寬相對于半周期t1較窄(這里要注意的是:相對于圖5(b),PWM 協議傳感器占空比也是50% 的上下區間,但不是 tx/t1,而是 t1/T),這是該類傳感器通過脈寬調制的方式輸出額外信息,包括安裝氣隙的變化、車輪的正反轉以及其他的警告信息。
圖5(d)中的電流輸出多出了一系列電流方波,這一類傳感器通過電流方波組成的序列提供了附加信息,包括氣隙儲備、車輪正反轉等。相對于PWM協議的輪速傳感器,AK 協議的輪速傳感器面對接近靜止的低速情況下,以及靜止情況(輪速為0)下具有更好的信息,體現在靜止情況下,AK協議中的輪速方波消失,但是后面9位的信息方波依然能夠輸出。
圖5(c)、(d)中的方波類型我們統稱為數據協議,具有數據協議的輪速傳感器最大的優點是能夠判定車輪的正反轉,這大大提高了輪速傳感器在智能方面的應用,如車輛駕駛狀態的判斷和應用相關的主動安全技 術, 包 括 電 子 駐 車(Electrical Parking Brake,EPB)、坡道輔助技術(Hill-start AssistControL,HA C)。隨著汽車智能化程度的不斷提高,自動泊車技術甚至無人駕駛技術的愈加成熟,智能式輪速傳感器也將發揮更大的作用。
2、輪速信號處理
當輪速傳感器在車身安裝固定好后,輪速信號的影響因素主要包括因震蕩導致的氣隙變化和齒圈的表面整潔度。另外,輪速信號隨車輪轉速的輸出信號,應是便于汽車 ECU 接收和處理的方波信號,也就是輪速傳感器需要對輸入信號(根據前面所述輪速信號采集方式的不同,輸入信號應包括模擬信號和數字信號)進行波形調制、穩壓、濾波以及智能式的補償調節等,要提高輪速測量的精度和準確性,輪速信號處理電路應具有的功能包括:?
(1)正弦波信號轉換為同頻率的方波信號(相對于被動式輪速傳感器);(2)抑制噪聲干擾;(3)降低氣隙變化對輪速信號的影響。基于以上功能,輪速信號處理電路的設計如圖6所示。
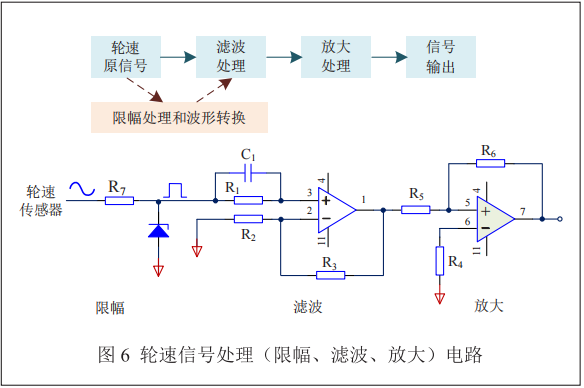
其中,限幅處理主要相對于輸出波形微類正弦的信號,一般采用穩壓管,將輸出信號的輸出幅值限制在目標值。其限幅特性表現為:當穩壓管選取限制電壓為V時,輸入信號Vi >V時,輸出信號VO=V,Vi
濾波電路要將信號中的噪聲干擾信號濾除和衰減,一般來說,衰減高頻雜波是主要目的,這樣采用有源低通濾波電路,同時采用放大器芯片組合放大,從而得到有效的輪速信號。
四、輪速傳感器應用舉例
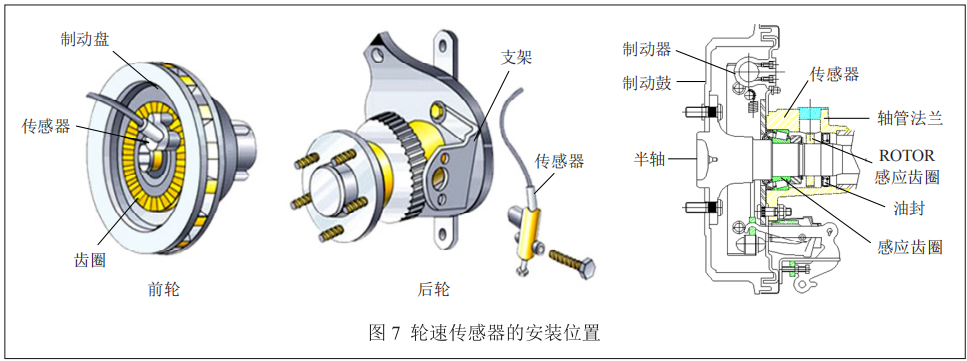
輪速傳感器的典型應用體現在防抱死系統(Antilock Brake System,ABS)中,ABS是針對車輛行駛過程中車輪抱死產生的問題。當車輪抱死滑移,車輪與路面間的側向附著力將完全消失,汽車運動將難以控制:前輪抱死情況下汽車失去轉向能力;后輪抱死情況下汽車發生側滑甩尾;當車輪全部抱死情況下,汽車發生水滑現象。當車輪處于滾動狀態下,駕駛員就能夠把握汽車的運動,同時可以縮短制動距離,這也就是 ABS 的意義所在。通過輪速傳感器獲取的速度信號,汽車 ECU判斷是否有車輪即將抱死,從而對輪缸壓力進行調節,使剎車效率達到90%以上。輪速傳感器在車輛的安裝如圖7所示。
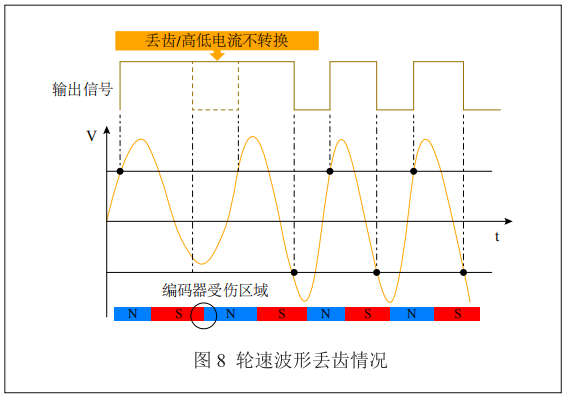
安裝時,傳感器頭與齒圈之間應留有一段約3mm以內的間隙(即氣隙)。同時注意在安裝前應向傳感器加注潤滑脂,以防止水、泥或灰塵等對傳感器工作產生影響,氣隙不在要求范圍內或齒圈表面不清潔等,可能造成輸出信號的丟齒、電流值不合格或者高低電流不轉換等錯誤模式,如圖8所示。
針對這種情況,齒圈與傳感器置于封閉環境是必然情況,包括油封、墊片等防油、防水的措施,以及齒圈材料上也應具有更好的防腐蝕性,傳感器注塑料的選擇等。提高傳感器和齒圈的使用穩定性決定了輪速信號的輸出穩定性,進而對ABS的有效使用發揮重要作用。
五、輪速傳感器發展展望
輪速傳感器的設計過程一般是主機廠提供需求,配件廠進行匹配和推薦,也有主機廠會對傳感器的部件進行指定(如支架類型、芯片類型等)。就現在多數的訂單使用情況來說,我們更多地推薦智能型主動輪速傳感器,也有不少主機廠會要求如此。從使用情況來看,汽車的智能化駕駛水平越來越高,智能型輪速傳感器所提供的補充信息能夠為汽車ECU提供使用參數,因此使用量必然逐步增大。
基于提到的汽車智能駕駛,這里對輪速傳感器的發展趨勢簡單分析:
1、雙芯片輪速傳感器
雙芯片的設計最開始在單片機領域應用,主要用于冗余系統的構建,冗余傳感器的設計直觀來說是一個齒圈有兩個輪速傳感器進行探測和信號輸出。我司雙芯片輪速傳感器的作用主要有以下兩點:
(1)提高信號準確性和有效性
傳感器輸出的兩路信號在后面的芯片中進行一系列包括濾波、差分計算等更加有效地減小測試值與真實值之間的誤差,并能夠極大減小數據傳輸線路損失造成的數據質量降級等對計算結果的影響。
(2)提高系統可靠性
若發生傳感器故障導致傳感器無法正常工作的情況,備用芯片能夠進行替代工作,繼續進行輪速信號輸出,由此減少系統的故障時間,增加系統的可靠性。
2、無線輪速傳感器
為了應用更復雜的底盤結構,開發出無線輪速傳感器,通過設置無線信號傳輸協議將傳輸信號輸入汽車ECU或總線,其最大優勢在于對車輛車型的完美適應,大量節省工作人員的設計時間,但是缺點比較明顯,需要進行后續的更多驗證(包括EMC測試、信號穩定性測試等)。
當然,隨著電動汽車的發展,智能化水平的不斷提高,對輪速信號的可靠性和穩定性的要求也更高,短時期的發展趨勢如上所述。
六、結束語
輪速信號的有效獲取在汽車安全系統中十分重要,本文對輪速傳感器的類型和信號處理的一般方法進行了簡要闡述,分析了其主要特點,描述了輪速傳感器的使用原理、類型以及安裝環境等。穩定有效的輪速信號是相關安全系統正常觸發的基礎,汽車智能化水平的提高對輪速傳感器提出了可靠性和精度等更高的要求,輪速傳感器的設計也必將不斷改善,為安全駕駛和智能駕駛提供準確度和適用性更高的信號。
編輯:黃飛
?











 工商網監
工商網監
評論