變頻馬達(dá)主要依靠半導(dǎo)體元件組成的電子電路來驅(qū)動馬達(dá)運(yùn)轉(zhuǎn),其中MCU數(shù)位控制技術(shù)的良寙攸關(guān)著馬達(dá)效率是否理想���;而在MCU控制技術(shù)日趨成熟,加上FOC演算法助力之下���,變頻馬達(dá)效率將逐步躍進(jìn)。##FOC演算法助力 PMSM控制效率升級��。
2014-08-23 08:56:53 4092
4092 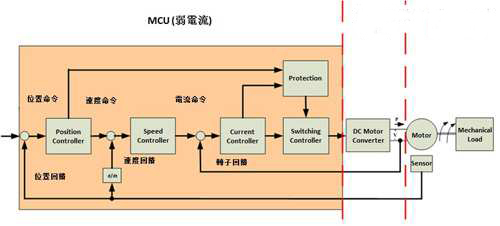
在學(xué)習(xí)FOC控制前��,我對于FOC控制完全不懂���,只知道中文叫做磁場定向控制���,因公司產(chǎn)品開發(fā)需要用到對永磁同步電機(jī)(PMSM)進(jìn)行精確的位置控制��,才開始從網(wǎng)上了解什么是FOC,有哪些數(shù)學(xué)公式���,控制的過程
2023-06-27 16:54:293066 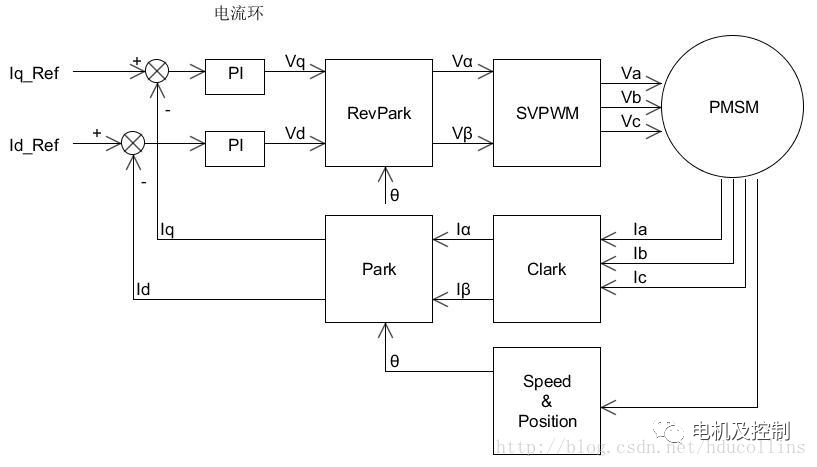
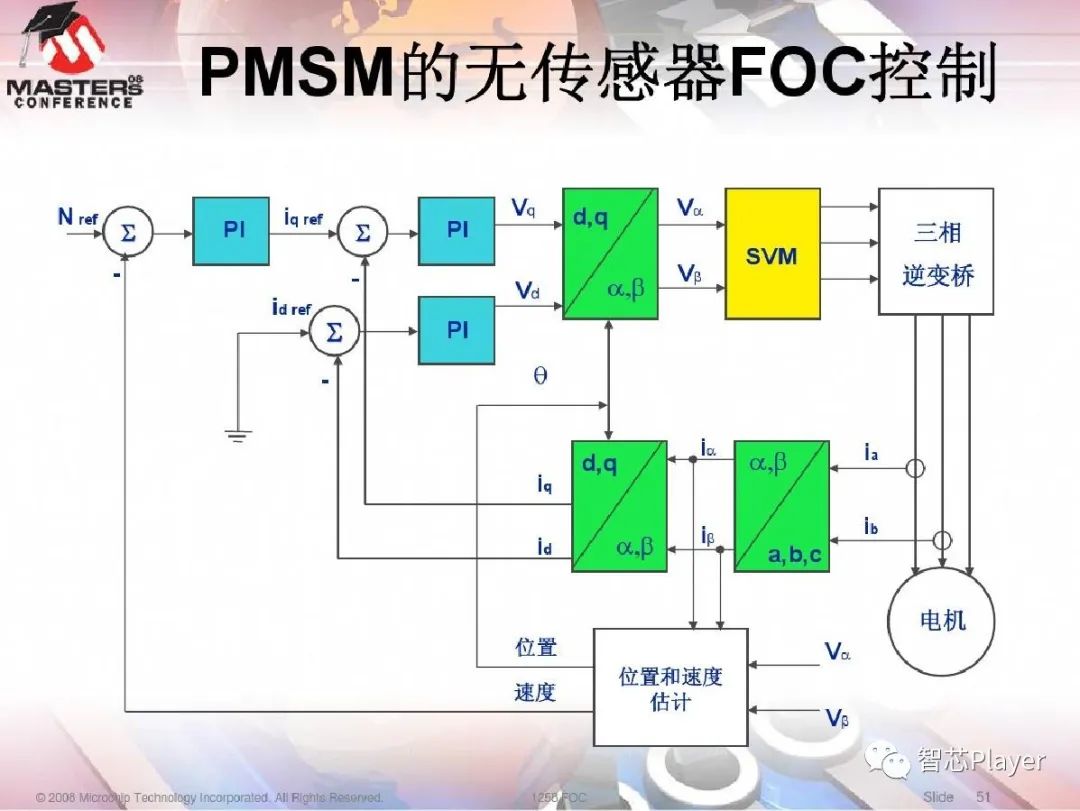
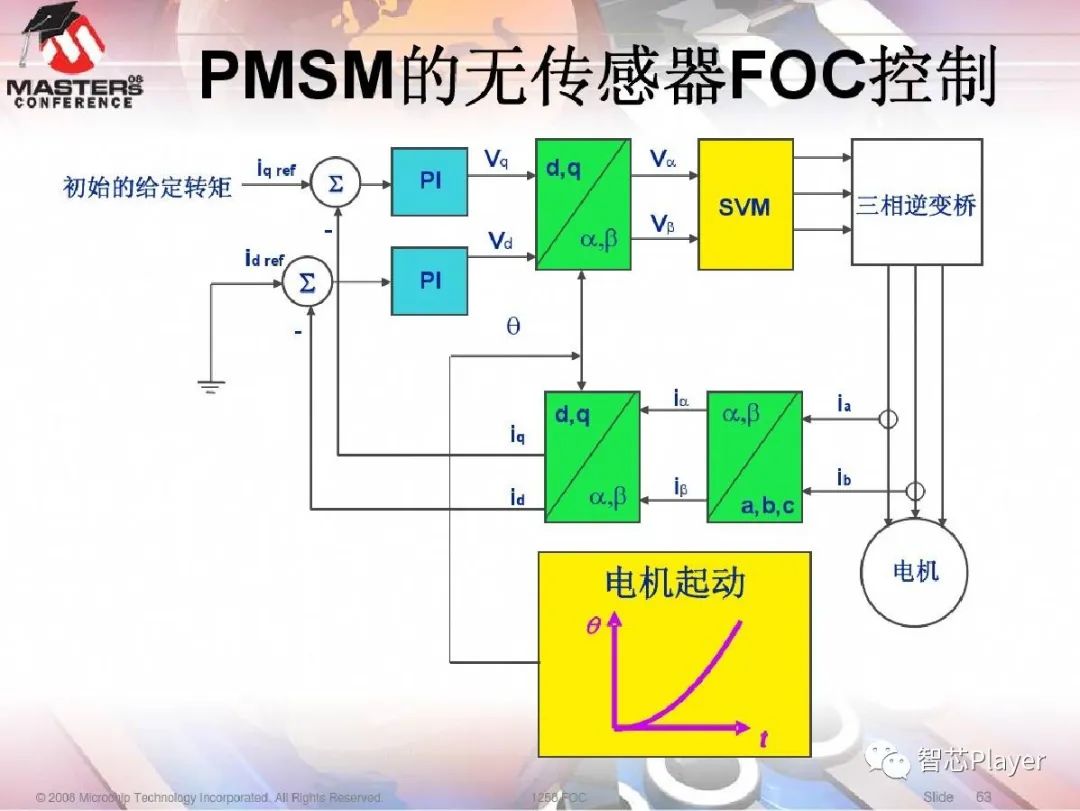
驅(qū)動電機(jī)轉(zhuǎn)動。FOC 典型控制框圖有傳感器 FOC/無傳感器 FOC對于有傳感器 FOC���,由于編碼器能反饋電機(jī)轉(zhuǎn)子的位置信息,因此控制簡單,但是往往對控制性能要求較高���。對于無傳感器 FOC,在控制中需要
2022-06-10 11:28:57
電機(jī)的無傳感器 磁場定向控制》( DS01078A_CN )中所介紹。由于不同電機(jī)存在參數(shù)差異���,因此需針 對每種新的電機(jī)模型對該算法進(jìn)行調(diào)整。
2018-08-18 18:36:51
在學(xué)習(xí)FOC控制前�����,我對于FOC控制完全不懂�����,只知道中文叫做磁場定向控制,因公司產(chǎn)品開發(fā)需要用到對永磁同步電機(jī)(PMSM)進(jìn)行精確的位置控制,才開始從網(wǎng)上了解什么是FOC���,有哪些數(shù)學(xué)公式,控制的過程
2021-08-27 08:01:59
使用FOC算法有位置傳感器控制永磁同步電機(jī)時���,程序中有一個參數(shù)是補(bǔ)償角度。我想問的是這個角度如果設(shè)置的和實(shí)際補(bǔ)償角度不一樣會有什么后果?會影響電機(jī)轉(zhuǎn)動嗎�����?
2018-09-21 14:14:40
PMSM電機(jī),外部24 V輸入5、 軟件支持源代碼提供XE164驅(qū)動雙PMSM無傳感器控制源代碼XC878無傳感器控制源代碼6��、免費(fèi)開發(fā)工具支持XC878:SDCCXE164: Tasking 硬件調(diào)試工具7�����、提供上位機(jī)調(diào)試工具���,支持CAN隔離形式實(shí)時監(jiān)控系統(tǒng)結(jié)構(gòu)框圖套件圖片
2018-12-04 09:52:31
Foc無傳感器帶載啟動代碼方案�����,高頻注入,電流模型估算���,滑膜 無感算法,C需要���,開源,不是官方庫���。重載啟動���,效果很好��。
2021-08-27 06:54:20
前言:PMSM常見的無感FOC方法���,以滑模SMO最為知名���。尤其在現(xiàn)階段SPM更為廣泛應(yīng)用的低壓小功率電機(jī)領(lǐng)域�����,高頻注入HFI更多應(yīng)用在初始啟動階段?����;5膶?shí)質(zhì)是基于PMSM的反電勢模型�����,讓系統(tǒng)進(jìn)入
2021-08-17 07:17:07
如何去編寫PMSM有霍爾傳感器的程序��?如何去編寫PMSM無霍爾傳感器的程序?PMSM有霍爾傳感器與PMSM無霍爾傳感器的程序有何區(qū)別?
2021-08-06 09:14:14
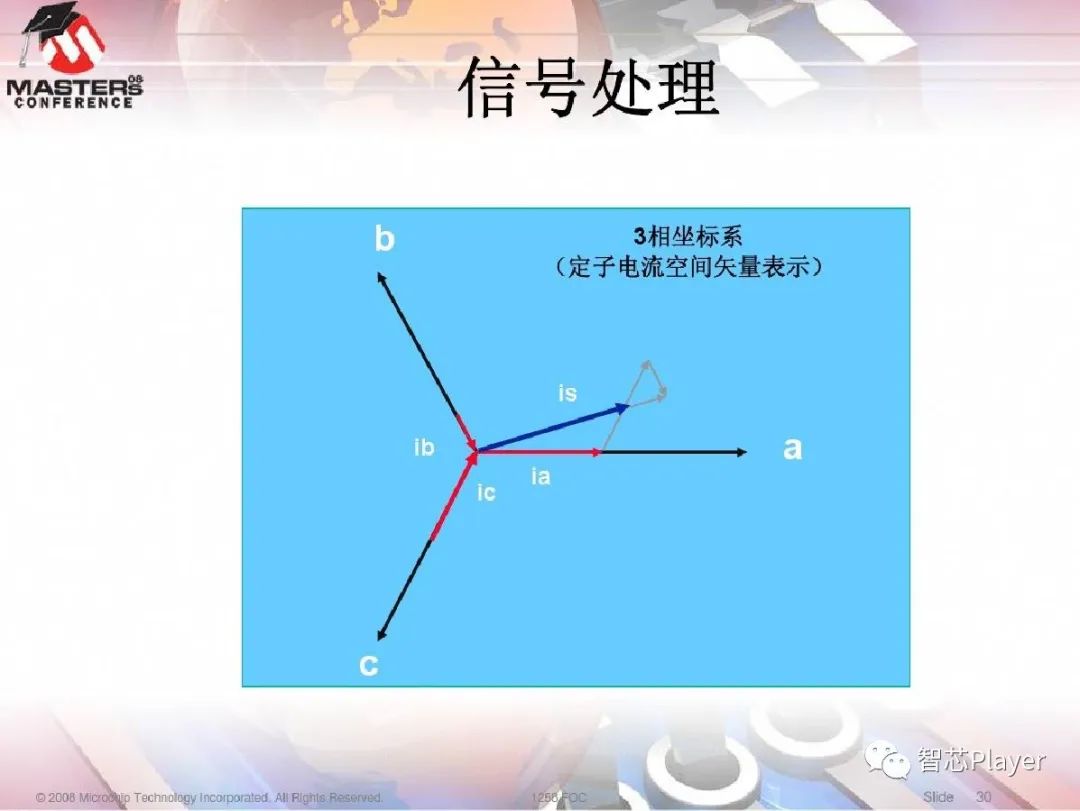
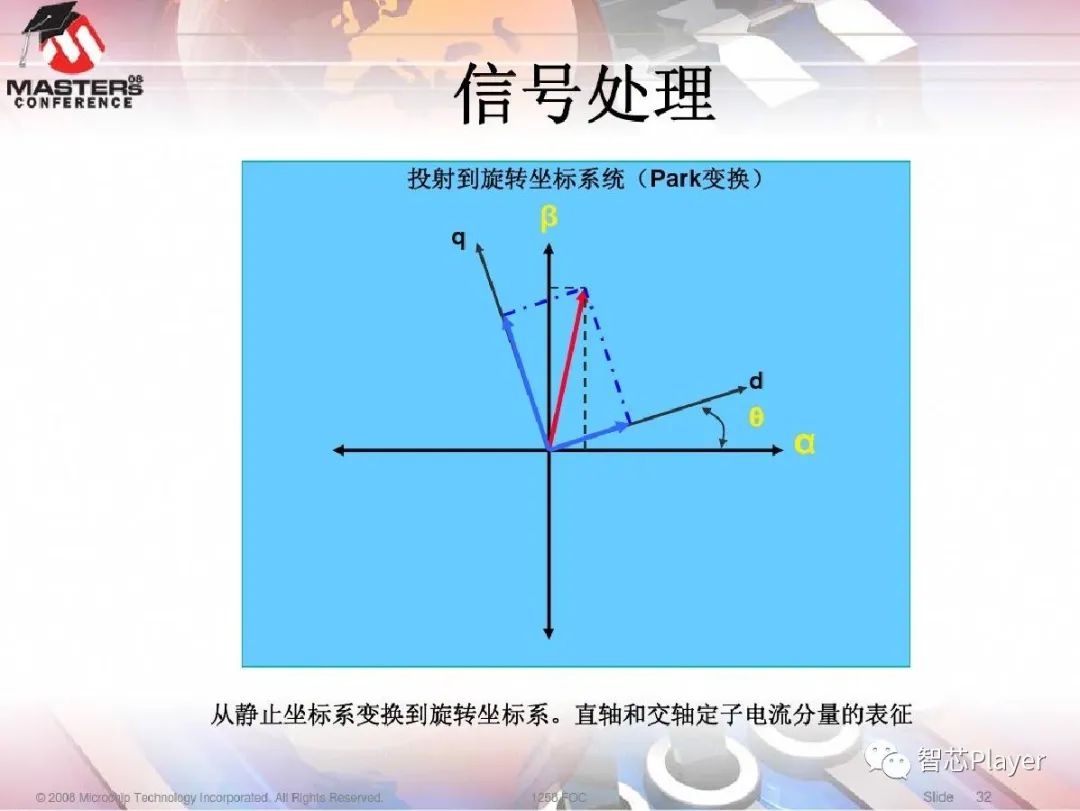
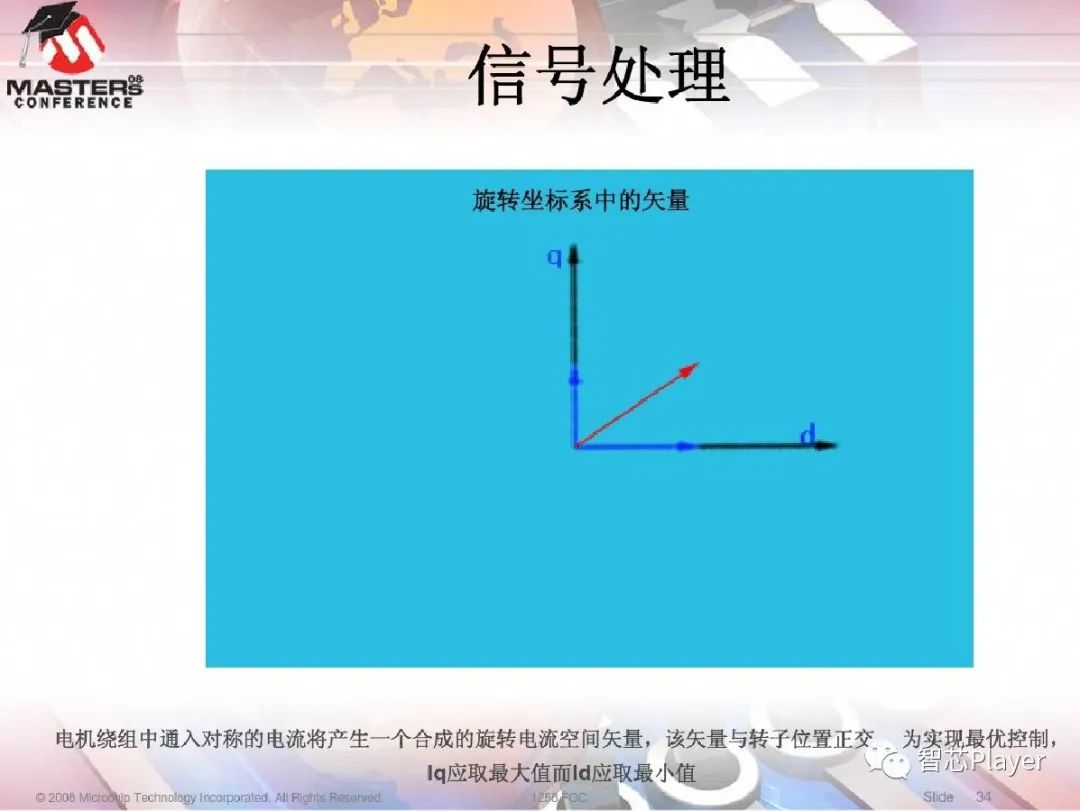
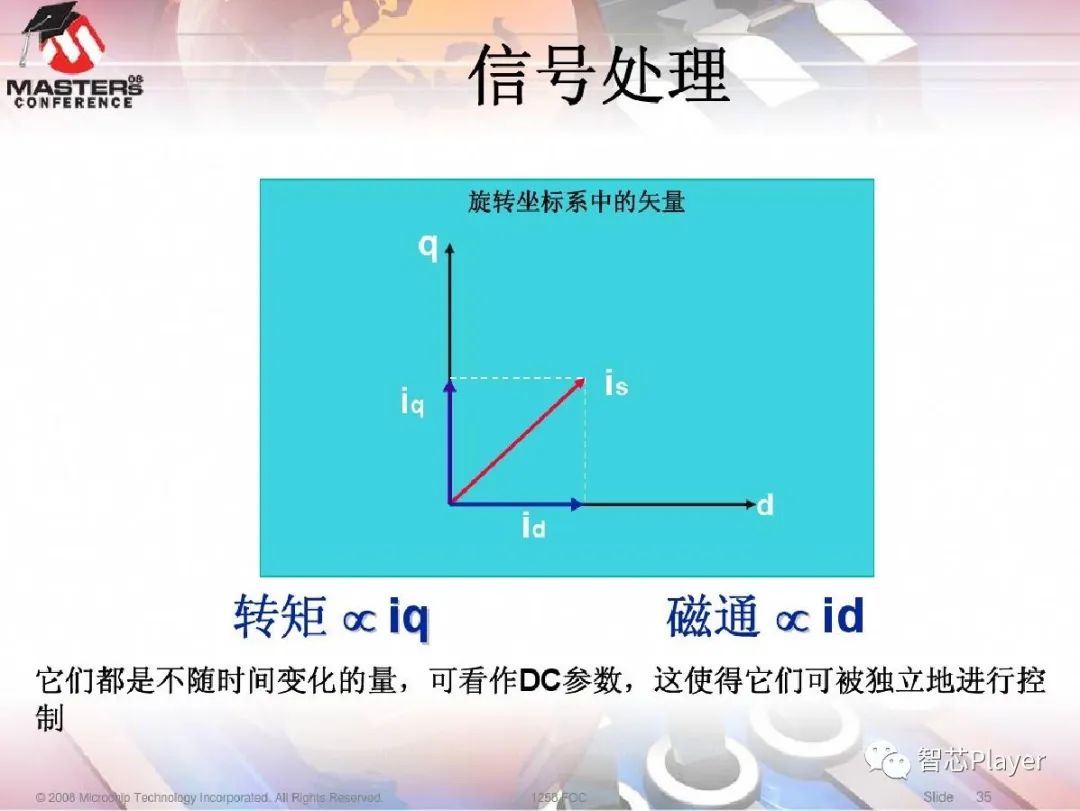
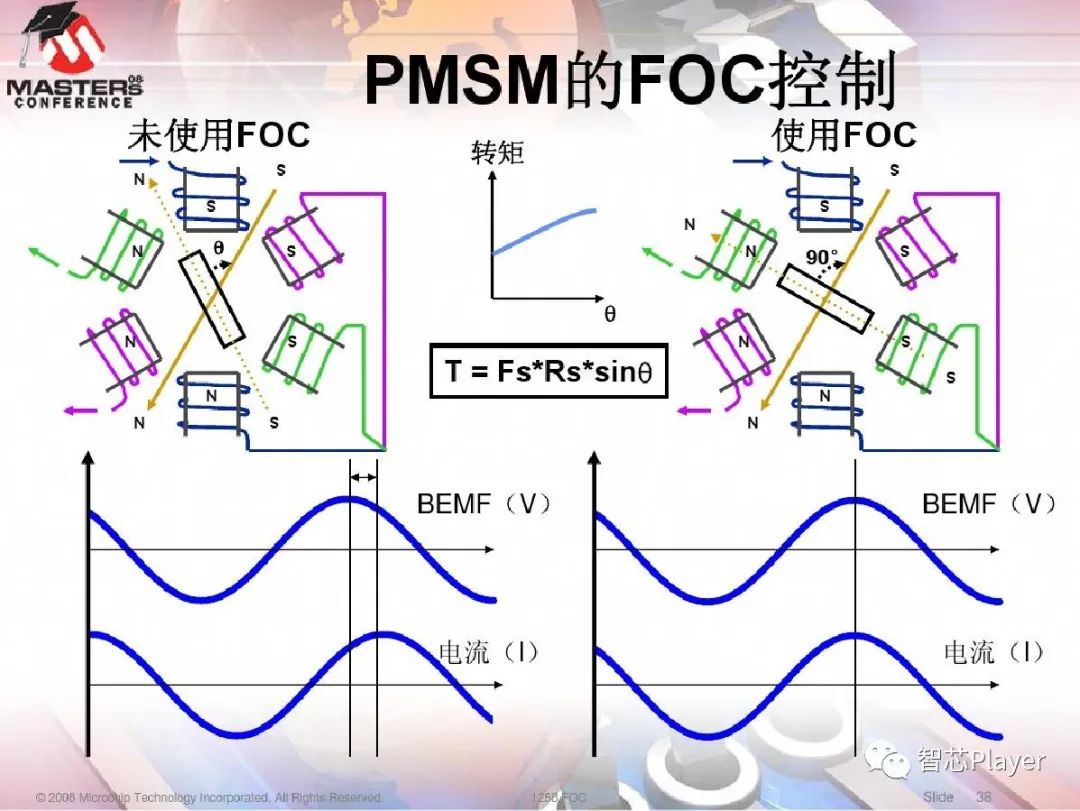
題外終于要到我的老本行了,PMSM的FOC控制,這種算法將三相無刷電機(jī)在算法上等效成一個直流電機(jī)���,通過坐標(biāo)變換將定子磁場進(jìn)行解耦,分解成D軸和Q軸兩個方向��,當(dāng)將D軸與轉(zhuǎn)子磁場定向時�����,那么Q軸方向
2021-09-16 08:09:32
pmsm無感ekf永磁同步電機(jī)無感foc控制,采用ekf觀測器���。帶原理圖,代碼純手寫���,方便移植。用于學(xué)習(xí)�����,用于學(xué)習(xí)�����。
2021-08-27 06:28:10
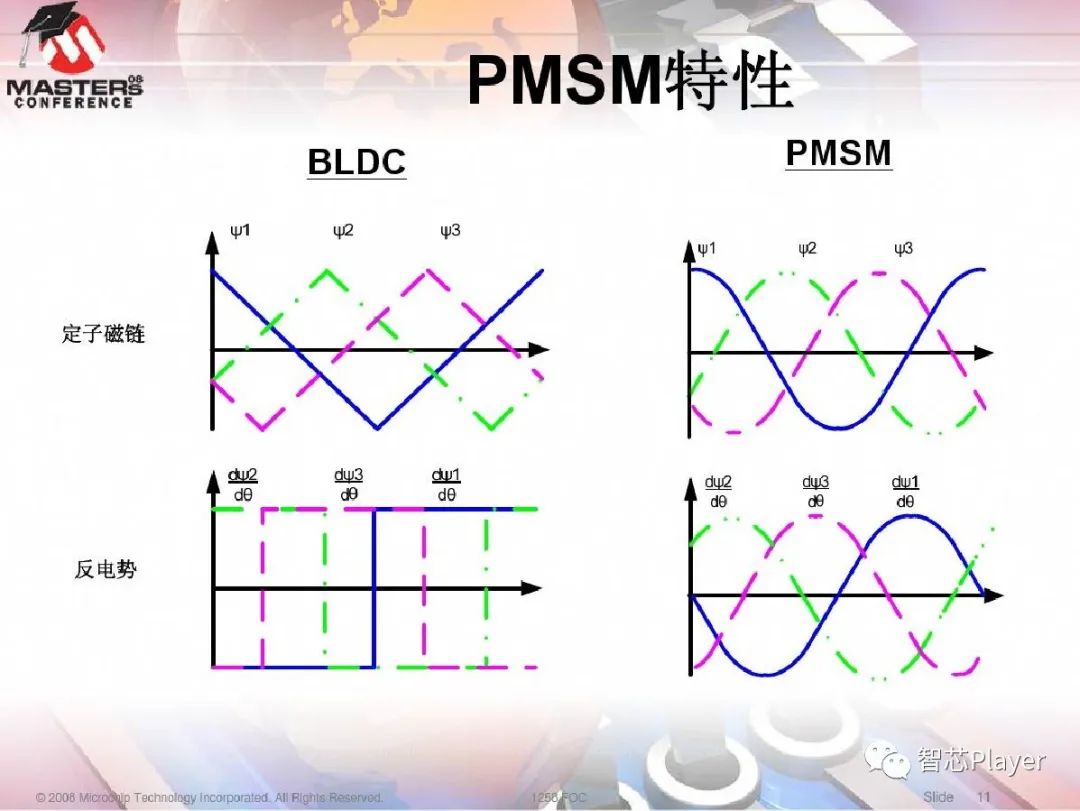
參考文件:一文了解BLDC與PMSM的區(qū)別? ?????BLDC和PMSM電機(jī)區(qū)別???? ? STM32 FOC BLDC與PMSM的區(qū)別PS:總結(jié)語句用紅色標(biāo)出���,看紅色字體即可?��,F(xiàn)代電機(jī)與控制
2021-08-30 08:38:10
Microchip 的應(yīng)用筆記 AN1083 詳細(xì)地講述了一種無傳感器無刷直流電機(jī)的控制算法��,其配套的開源算法采用 dsPIC? 數(shù)字信號控制器實(shí)現(xiàn)�����,此前在淘寶購入了一塊基于 STM32 的無刷直流電機(jī)開發(fā)板,于是試著將該開源代碼移植至手上這塊開發(fā)板上���。開發(fā)板如下圖所示: 因硬件平臺不...
2021-08-17 06:39:53
無傳感器�����、無電刷的電動機(jī)控制設(shè)計(jì) 無電刷電動機(jī)的應(yīng)用設(shè)計(jì)越來越多都是傳統(tǒng)上依賴DC和異步電動機(jī)���。主要的好處一般包括無電刷電動機(jī)的單位成本和能以電子方式控制速度和轉(zhuǎn)距���,這不單節(jié)省機(jī)械設(shè)計(jì)���,而且還使到
2016-01-25 17:31:36
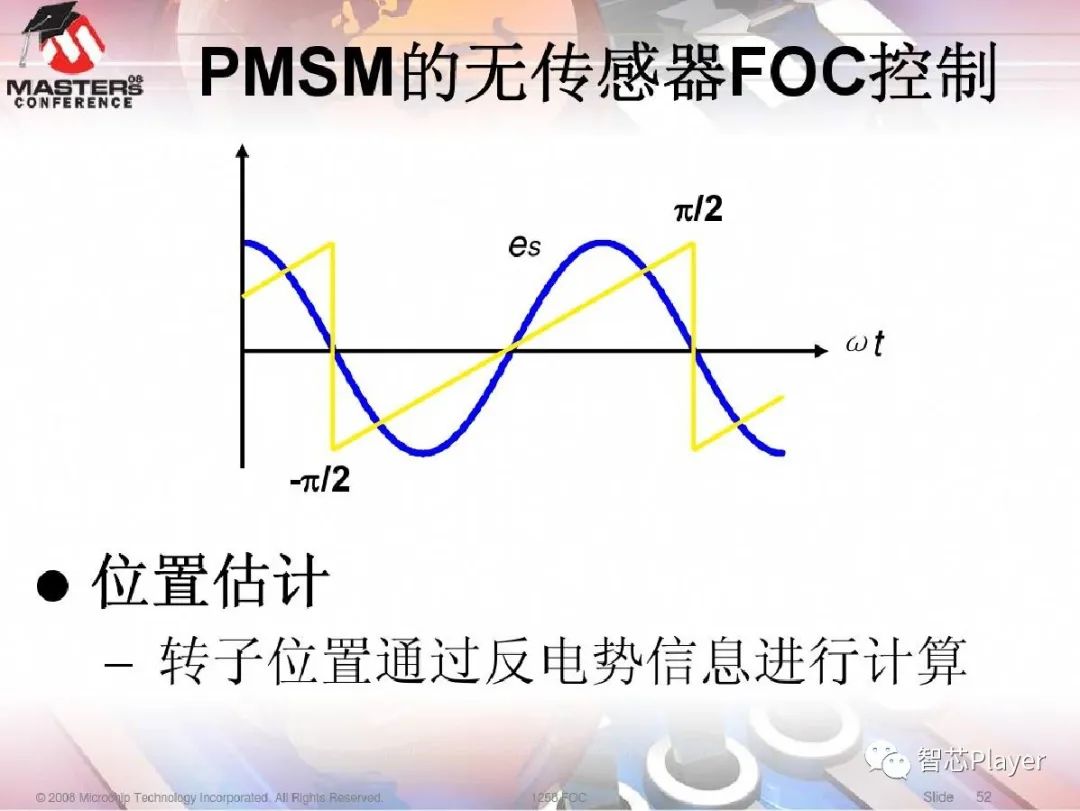
位置角的位置傳感器�����,但這種方法存在傳感器的安裝部位、安裝精度及可靠性等問題,需要不使用位置傳感器的控制技術(shù)�����。 為此���,在部分用途��,不使用傳感器的馬達(dá)得到普及��。這種馬達(dá)根據(jù)線圈隨著永久磁鐵旋轉(zhuǎn)而產(chǎn)生的電壓
2016-01-19 14:26:17
FOC,因?yàn)殡姍C(jī)的傳感器(一般為霍爾傳感器或編碼器等)能反應(yīng)電機(jī)轉(zhuǎn)子的位置信息��,因而在控制中可以不運(yùn)用位置估算算法���,控制起來相對無傳感器FOC簡單�����,可是對帶傳感器的電機(jī)使用來說�����,往往對控制功能要求較高
2021-10-25 13:48:00
算法篇(PID詳解)
2020-05-19 10:30:59
BLDC無傳感器算法研究
2022-12-12 08:26:02
各種負(fù)溫度系數(shù)_NTC_熱敏電阻-溫度傳感器技術(shù)參數(shù)詳解與選型
2012-08-14 22:14:45
各種負(fù)溫度系數(shù)_NTC_熱敏電阻-溫度傳感器技術(shù)參數(shù)詳解與選型
2014-09-19 12:33:14
TM32 PMSM 無霍爾FOC 怎么實(shí)現(xiàn)逆風(fēng)啟動
2023-10-15 07:23:12
:24V PMSM帶HALL及1000線編碼器HALL輸入��、光電編碼器輸入�����,反電動勢偵測,多種有/無傳感器控制方式120方波�����、180正弦波控制方式��,FOC矢量控制方式三電阻電流檢測�����,過流停車保護(hù)(全
2015-05-21 11:34:40
HALL及1000線編碼器典型配置:24V BLDC帶HALLHALL輸入、光電編碼器輸入,反電動勢偵測��,多種有/無傳感器控制方式120o方波��、180o正弦波控制方式���,FOC矢量控制方式三電阻電流檢測
2016-01-15 11:05:22
偵測��,多種有/無傳感器控制方式120o方波��、180o正弦波控制方式,FOC矢量控制方式三電阻電流檢測,過流停車保護(hù)(全隔離霍爾電流檢測方式可選配)方便的人機(jī)界面:TFT液晶顯示��、6按鍵���、電位器��、4個
2015-05-29 08:14:07
SVPWM的原理推導(dǎo)和控制算法詳解,不錯的資料�����,值得一看
2016-01-28 15:09:44
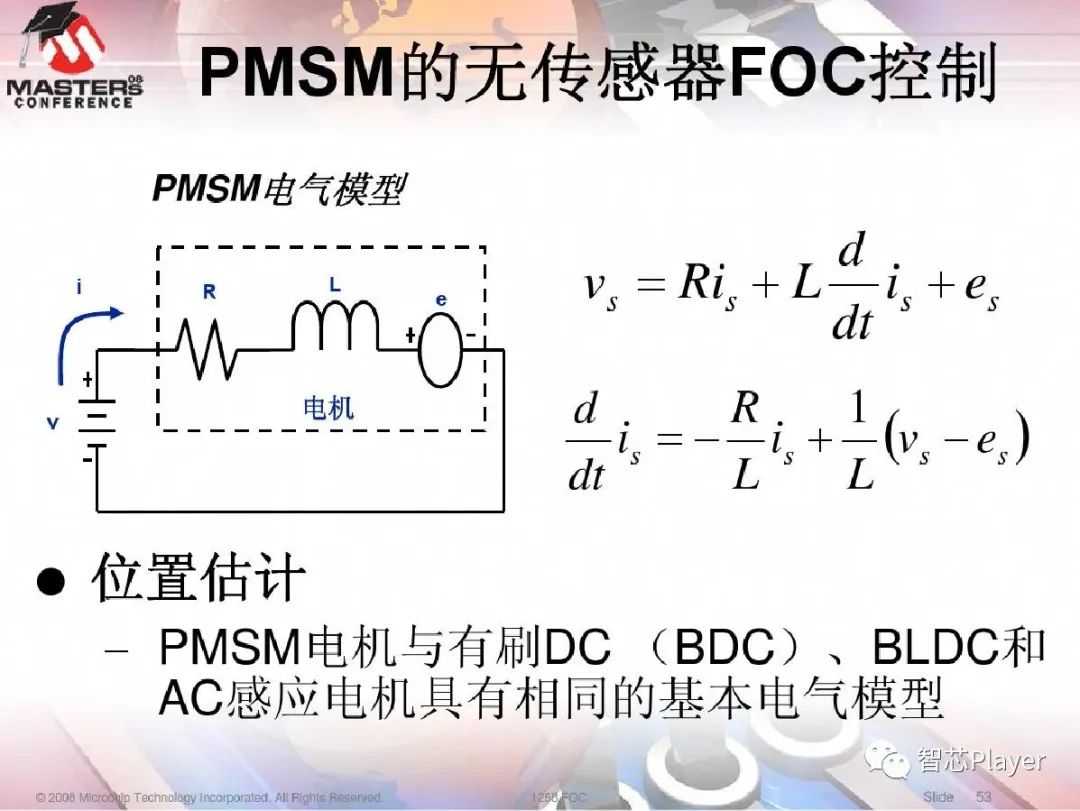
的電機(jī)控制算法的時間�����。它是用C語言編寫的�����,并實(shí)現(xiàn)核心電機(jī)控制算法,以及用于轉(zhuǎn)子位置的傳感器讀取/解碼算法和無傳感器算法重建��。此庫可以輕松配置為利用STM32F30x的嵌入式高級模擬外圍設(shè)備(快速比較器
2023-09-19 06:41:26
及力矩控制器電流讀取3電阻法電流傳感器法轉(zhuǎn)子的速度/位置反饋:Hall傳感器正交編碼器掃一掃進(jìn)***流BLDC FOC技術(shù)`
2019-12-02 16:56:54
limitation磁鏈及力矩控制器電流讀取Day.2轉(zhuǎn)子的速度/位置反饋Hall傳感器正交編碼器無傳感器轉(zhuǎn)子位置檢測框圖觀測器理論應(yīng)用到PMSM馬達(dá)系統(tǒng)無傳感器轉(zhuǎn)子位置檢測PLL起動策略轉(zhuǎn)子堵轉(zhuǎn)檢測頭文件
2019-03-27 14:36:42
按照電機(jī)有無傳感器(一般為編碼器)來區(qū)分可以分為有感FOC和無感FOC��,前者通過傳感器反饋電機(jī)轉(zhuǎn)子的位置信息��,控制相對簡單,但對控制性能要求較高��。后者由于電機(jī)不帶任何傳感器��,所以在控制中需要通過采集電機(jī)
2021-03-31 17:49:54
描述此 TI 設(shè)計(jì)描述了一款電機(jī)控制評估套件,用于旋轉(zhuǎn)三相無刷直流和無刷交流 (BLAC)(通常稱為“永久磁性同步電機(jī) (PMSM)”)電機(jī)���,包含無傳感器磁場定向/矢量控制 (FOC) 示例���。這種
2018-11-12 17:05:18
驅(qū)動電機(jī)轉(zhuǎn)動。FOC 典型控制框圖有傳感器 FOC/無傳感器 FOC對于有傳感器 FOC��,由于編碼器能反饋電機(jī)轉(zhuǎn)子的位置信息�����,因此控制簡單,但是往往對控制性能要求較高��。對于無傳感器 FOC�����,在控制中需要
2022-06-10 11:36:13
驅(qū)動電機(jī)轉(zhuǎn)動。FOC 典型控制框圖有傳感器 FOC/無傳感器 FOC對于有傳感器 FOC�����,由于編碼器能反饋電機(jī)轉(zhuǎn)子的位置信息�����,因此控制簡單�����,但是往往對控制性能要求較高。對于無傳感器 FOC��,在控制中需要
2022-06-10 11:40:13
可配置PMSM無傳感器磁場定向控制參考設(shè)計(jì)�����。該參考設(shè)計(jì)演示了使用ATxmega16D4微控制器的三相永磁同步(PMSM)電機(jī)的電機(jī)控制解決方案��。該參考設(shè)計(jì)具有PC配置實(shí)用程序���,用于配置和調(diào)整無傳感器磁場定向控制(FOC)參數(shù)
2020-05-29 17:19:55
你好, 我正在嘗試控制電動滑板車的輪內(nèi)電機(jī)。這是我到目前為止所做的...... 1.輪轂電機(jī):300W�����,霍爾傳感器(表面貼裝PMSM)2. 3分流相電流檢測3. MC工作臺PMSM FOC Lib
2018-11-05 10:06:35
偏移。工作流程 2 - 校準(zhǔn) PMSM 電機(jī)的霍爾傳感器偏移�����。工作流程 3 - 使用霍爾傳感器的 PMSM 磁場定向控制���。工作流程 1 和 2 運(yùn)行良好���,電機(jī)可以運(yùn)行��,我可以在示波器中觀察到信號��。但是在
2023-04-03 06:19:29
://v.youku.com/v_show/id_XNTc0NjMzMTQw.html本人做的PMSM無傳感器矢量FOC控制http://v.youku.com/v_show
2018-05-02 12:07:02
在無傳感器的FOC例程中,SVPWM中的6個區(qū)域代碼是哪里控制切換的,再例程中沒找到對應(yīng)的代碼。
2024-01-24 06:15:20
或 PMSM的控制方法�����,磁場定向控制 (FOC) 算法被用于電機(jī)需要以高效率和超小可聞噪聲平穩(wěn)運(yùn)行的許多應(yīng)用���。MSPM0MCU 憑借其低價格���、品類豐富的產(chǎn)品系列��、高效的數(shù)學(xué)加速器和高性能特性��,可以充分發(fā)揮 FOC 控制的作用���。*附件:zhcacb9.pdf
2023-04-12 14:38:32
描述使用無傳感器磁場定位控制 (FOC) 來運(yùn)轉(zhuǎn)和控制三相無刷直流 (BLDC) 和無刷交流 (BLAC) 電機(jī)或永磁同步電機(jī) (PMSM)�����。該設(shè)計(jì)為 50V 以下 7A 電機(jī)提供高性能��、高能效
2018-08-18 06:36:52
?�! ∽兯衮?qū)動 VSD 通常采用無傳感器矢量磁場定向控制�����,不僅省去了感應(yīng)器的成本�����,而且還消除了它們在可靠性方面的負(fù)面影響。無傳感器算法是實(shí)現(xiàn)低成本閉環(huán)速度控制的重要組成部分���。無傳感器控制采用馬達(dá)的反
2012-11-28 15:36:19
limitation磁鏈及力矩控制器電流讀取第二天上午轉(zhuǎn)子的速度/位置反饋Hall傳感器正交編碼器無傳感器轉(zhuǎn)子位置檢測框圖觀測器理論應(yīng)用到PMSM馬達(dá)系統(tǒng)下午無傳感器轉(zhuǎn)子位置檢測PLL起動策略轉(zhuǎn)子堵轉(zhuǎn)檢測頭文件
2014-03-08 16:51:55
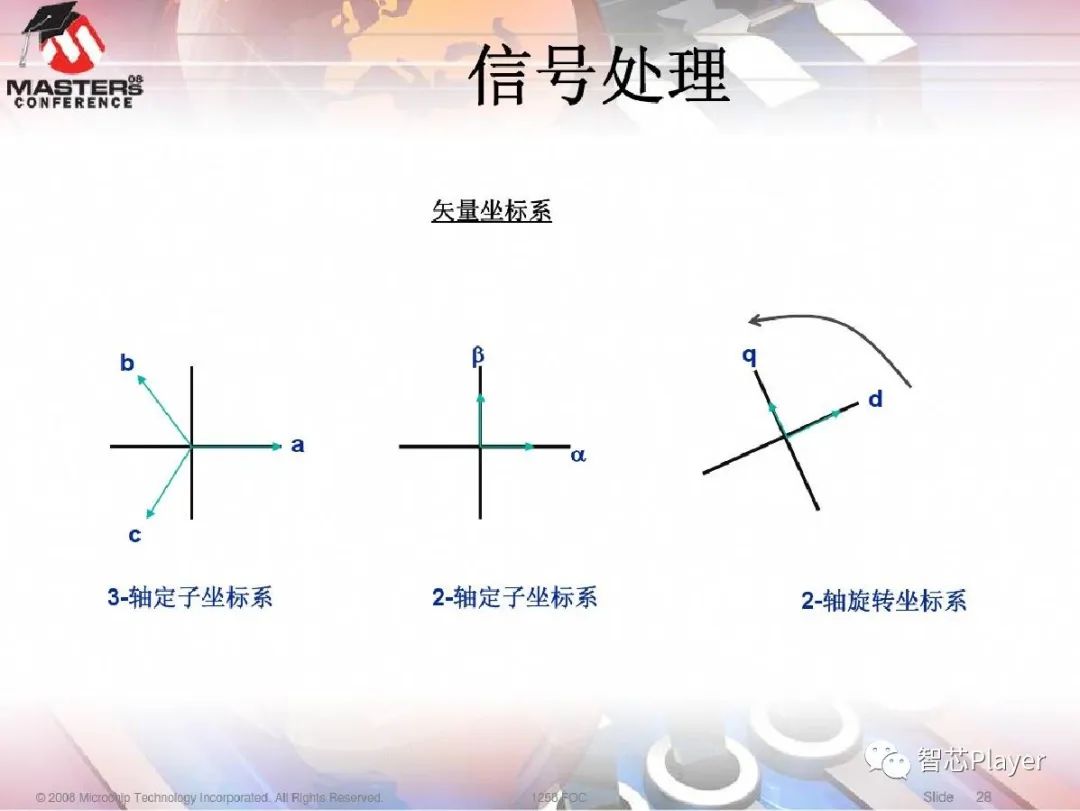
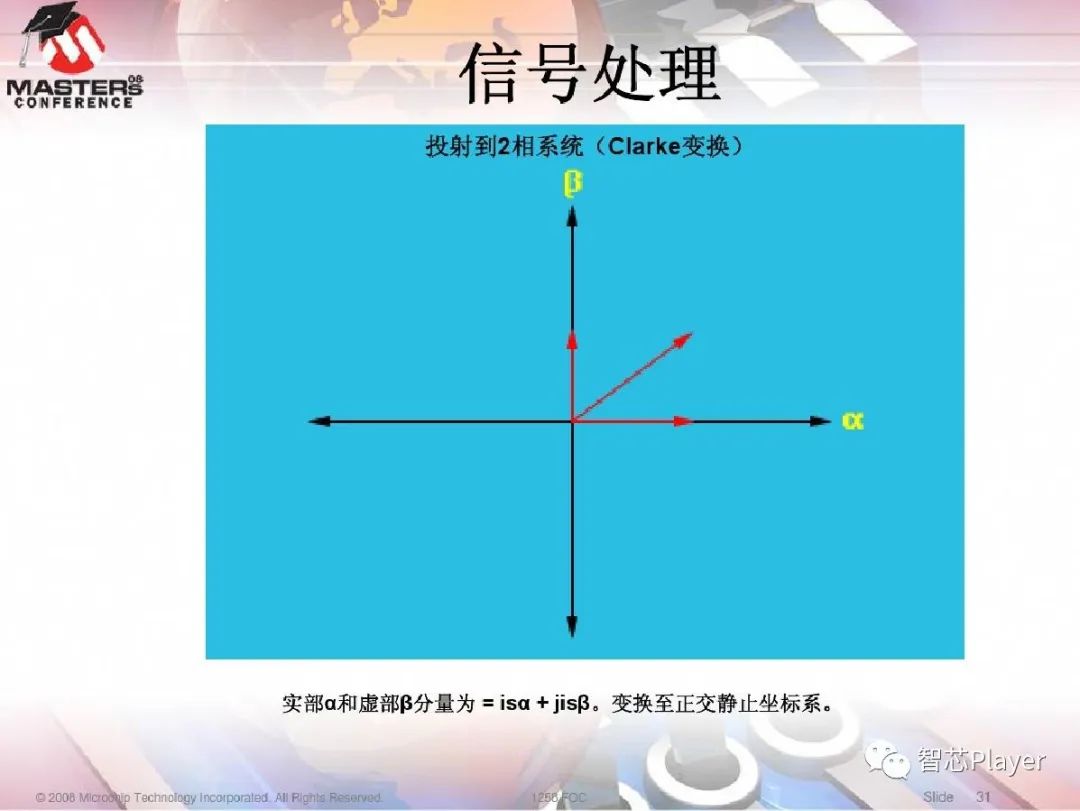
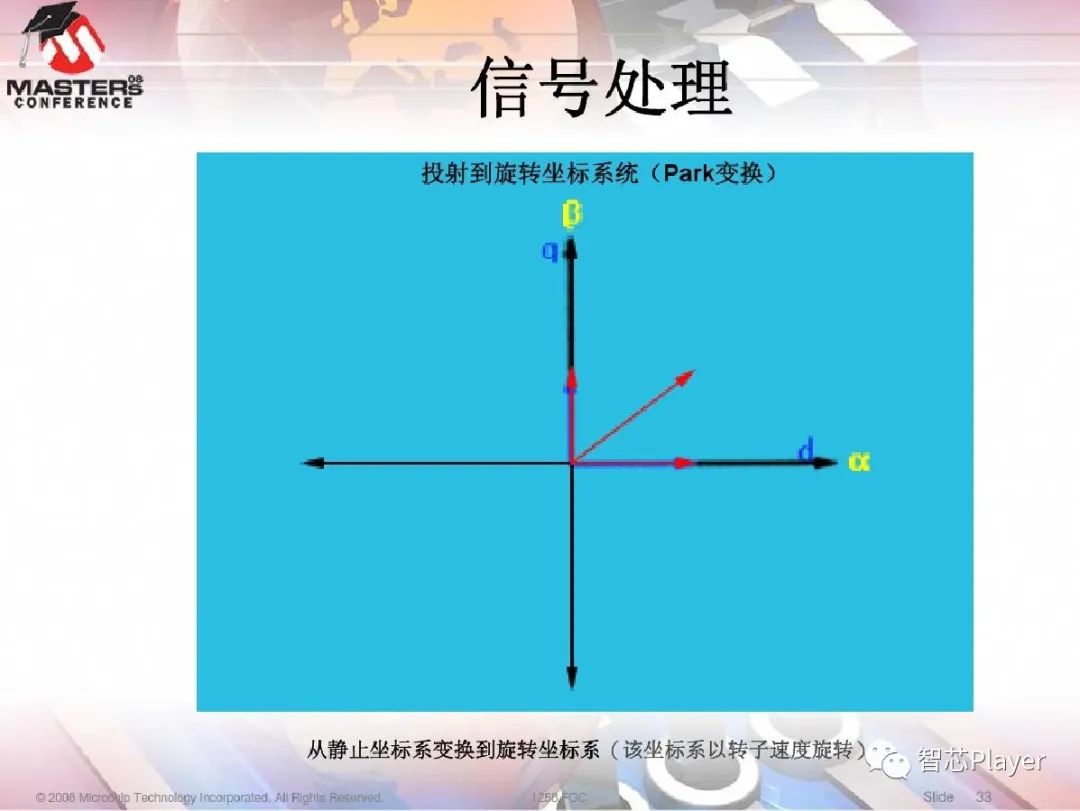
本帖給大家分享一批基于STM32的PMSM FOC軟件庫培訓(xùn)資料,涉及到STM32 產(chǎn)品技術(shù)介紹���、馬達(dá)控制套件、直流無刷馬達(dá)�����、 FOC 基礎(chǔ)��、Clark及Parke坐標(biāo)系轉(zhuǎn)換、電流讀取等電機(jī)技術(shù)相關(guān)內(nèi)容�����,大致如下,供大家下載參考
2019-10-11 17:34:57
項(xiàng)目名稱:基于XC836的無傳感器FOC控制方案項(xiàng)目介紹:自主研發(fā)項(xiàng)目��。本方案采用infineon 8位單片機(jī)作為主控MCU��,采用單電阻取樣���,無HALL��,FOC控制。這是目前市場特唯一采用8位單片機(jī)
2018-12-03 14:13:05
PMSM無傳感器矢量控制原理PSoC4簡介基于PSoC4的無傳感器矢量控制方案基于PSoC4的設(shè)計(jì)實(shí)例
2021-02-24 06:12:44
精準(zhǔn)的數(shù)字矢量控制算法���。 本文檔中討論了這個算法的實(shí)現(xiàn)。FOC算法在很大速度范圍內(nèi)保持高效�����,并且通過處理一個電機(jī)的動態(tài)模型來將具有瞬態(tài)相位的轉(zhuǎn)矩變化考慮在內(nèi)�����。 解決方案中提出了消除相位電流傳感器以及使用一個觀察器來實(shí)現(xiàn)速度無傳感器控制的方法�����。
2019-12-10 17:17:02
你好我是STM32的新手��。我想使用 FOC 來控制無傳感器電機(jī)��。哪些MPU/MCU可以用于無人機(jī)電機(jī)的ESC��。我發(fā)現(xiàn) STEVAL-ESC001v1 可以用作入門級商用無人機(jī)設(shè)計(jì)的參考設(shè)計(jì)。我需要下載哪些軟件并且只訂購 ESC001v1 就足以啟動項(xiàng)目��?或者有必要訂購其他板嗎�����?
2022-12-26 08:57:57
利用Kinetis KV10實(shí)現(xiàn)適用于風(fēng)扇的PMSM無傳感器磁場定向控制 (FOC)
2022-12-08 06:26:20
利用MCAT工具調(diào)試三相PMSM無傳感器控制應(yīng)用
2022-12-08 07:15:36
你好任何人都可以幫助我�����,我需要在我的 PMSM 電機(jī)控制軟件中添加低速無傳感器(高注入頻率)我知道 MOTOR CONTROL WORK BENCH ST 有這個功能 ANU ONE 如何只添加這個
2023-01-16 08:16:53
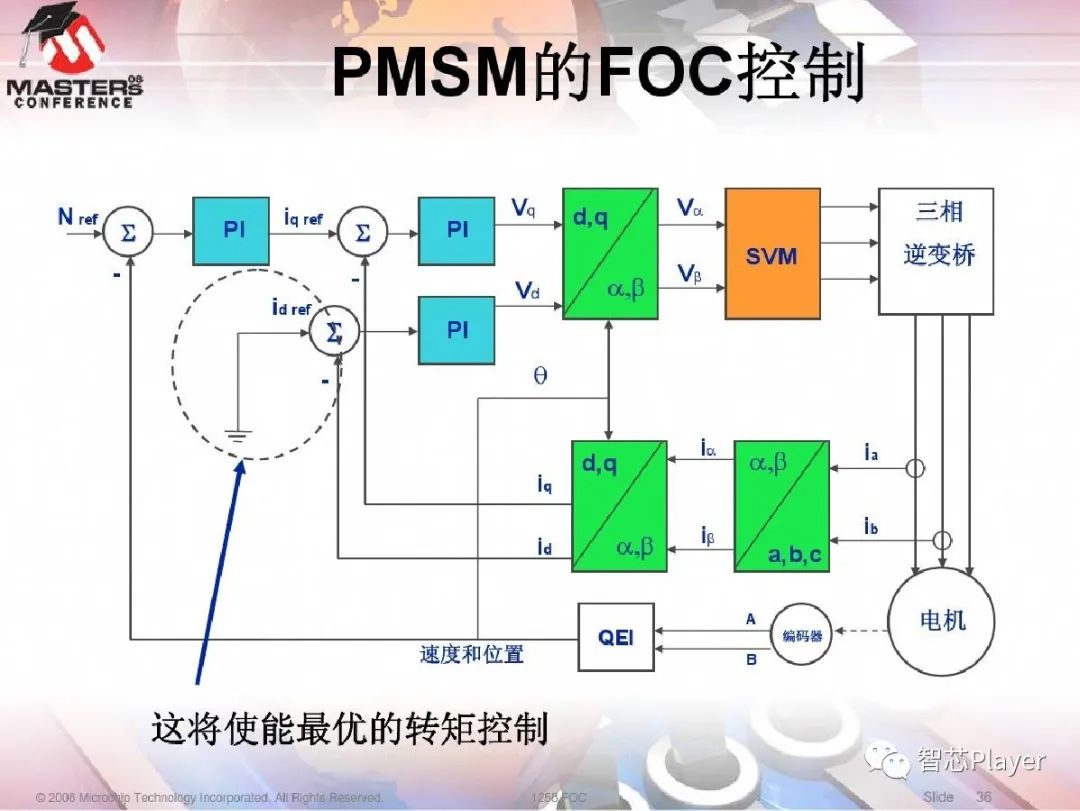
前言 永磁同步電機(jī)(PMSM)應(yīng)用范圍廣泛���,經(jīng)常用于新能源汽車���、機(jī)床���、工業(yè)等領(lǐng)域�����。在實(shí)際使用中���,我們經(jīng)常采用矢量控制算法(FOC)完成PMSM的高性能控制���。 矢量控制中通常采用雙閉環(huán)結(jié)構(gòu)���,其中外環(huán)為
2021-08-27 06:45:22
尋找一個現(xiàn)成的PMSM控制算法驗(yàn)證平臺,幫我做控制算法的驗(yàn)證實(shí)驗(yàn)���。拜謝各位前輩了�����!我的情況說明:我目前已經(jīng)在simulink中搭建好控制算法���,并且仿真出來了���,但沒有驗(yàn)證的平臺��。因?yàn)闀r間比較急��,我希望
2019-12-23 16:25:38
小米平衡車,好像是用的無感foc控制,利用mos內(nèi)阻采樣電流���,要說無感foc電調(diào)可能很多高手都能搞定,但是平衡車平衡時電機(jī)幾乎是零速控制,無感foc最低能控制到零速嗎,感覺是不是還是得靠霍爾傳感器
2016-01-13 09:35:13
,但是依然不需要準(zhǔn)確的絕對位置。 總結(jié)下來���,從硬件的角度DTC相比于FOC可以省略一個位置傳感器!當(dāng)然,現(xiàn)在有很多改進(jìn)的DTC算法需要用到電機(jī)的絕對位置�����。 但是在電機(jī)控制中���,無論是DTC控制還是FOC控制
2019-10-14 10:51:09
(無.lib文件)�����。本次直播��,主講無感FOC框架.MATLAB,SIMULINK從0搭建一個FOC框架,并代碼生成�����。無感觀測器算法原理及代碼生成。
這是搭建的MATLAB模型�����,可以仿真電機(jī)參數(shù)和算法
2023-05-26 14:00:49
控制對電機(jī)進(jìn)行了測試�����,高達(dá) 1.2kHz 電氣頻率(12kRPM��,6 極對電機(jī))。我們的無人機(jī) ESC 高速無傳感器 FOC 參考設(shè)計(jì)擁有一流的 FOC 算法實(shí)施,可實(shí)現(xiàn)更長的飛行時間��、更佳的動態(tài)性能
2019-10-22 16:29:56
嗨�����, 我有一個PMSM,我計(jì)劃運(yùn)行無傳感器�����。 如果我遇到傳感器的問題 - 我正在使用的電機(jī)也裝有一個旋轉(zhuǎn)變壓器�����。我有一個來自模擬設(shè)備的解析器解碼器,所以我想知道我是否可以通過SPI總線讀取它
2018-11-14 17:09:21
針對于FOC方式控制的PMSM主要有哪幾種相電流采集方式��?分別有什么特點(diǎn)?怎樣去編寫按鍵掃描及顯示屏顯示程序�����?電流傳感器法的空間矢量調(diào)制是什么��?如何去實(shí)現(xiàn)FOC控制算法��?
2021-08-04 07:32:32
。(無霍爾的控制方法為主流)1.方波有霍爾傳感器的控制1.原理分析: 對于無刷直流電機(jī)的控制�����,需要控制的電路就是三相橋式電路。有無霍爾都是為了最后確定MOS管的通斷情況��。...
2021-09-06 07:24:05
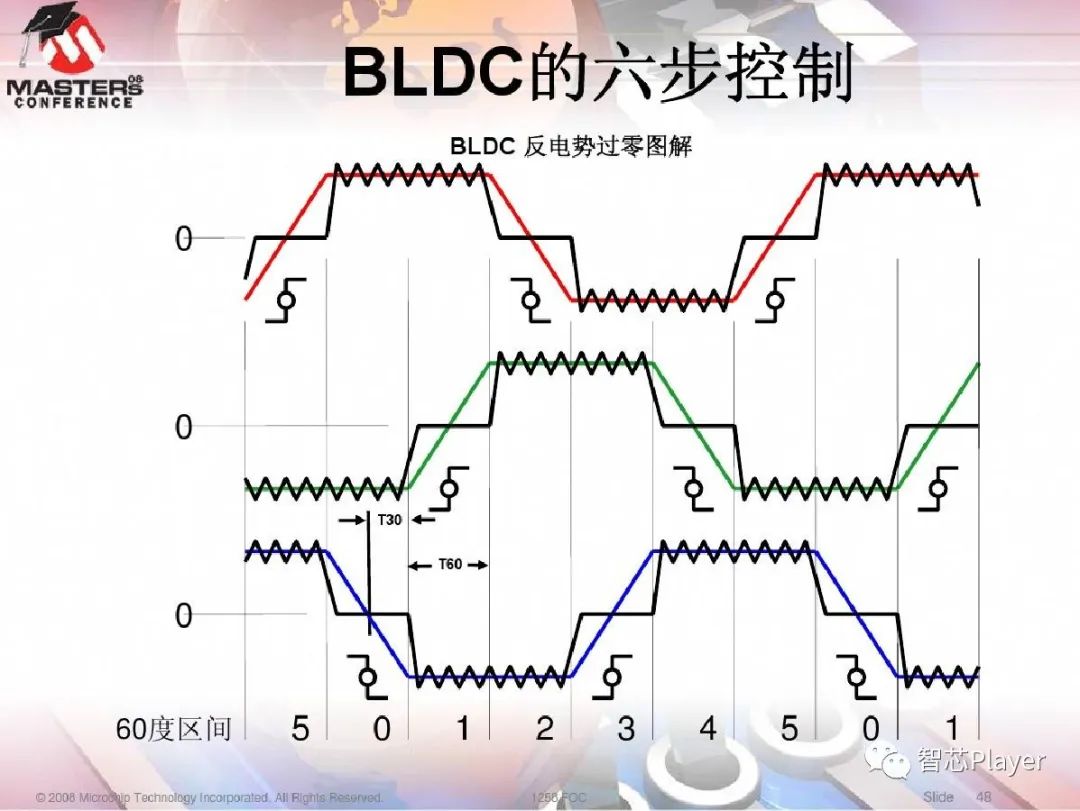
如何去實(shí)現(xiàn)六步方波無傳感器BLDC的堵轉(zhuǎn)檢測功能呢�����?正弦波FOC無傳感器堵轉(zhuǎn)檢測的方法有哪幾種?分別是什么��?
2021-07-20 06:37:10
無感Foc電機(jī)控制算法采用滑膜觀測器�����,啟動采用Vf�����,全開源c代碼,全開源,啟動順滑,很有參考價值���。帶原理圖,筆記僅僅展示一部分�����,都是我自己做的��,版權(quán)所有���。
2021-08-27 07:34:20
我想用28035做電機(jī)PMSM的矢量控制(FOC)���,但電機(jī)上只安裝了三個霍爾傳感器��,沒有編碼器���,請問這樣可以做FOC算法嗎�����?因?yàn)橹翱吹竭^說做FOC一定要用到編碼器.不知道有沒有了解的。
2018-12-04 11:22:40
序列�����。是否有可能通過FOC lib實(shí)現(xiàn)�����,或者我需要為這種情況制作我自己的控制算法���。 計(jì)劃系統(tǒng)將配備12V 2-4A PMSM電機(jī)�����,3個電流分流傳感器和HALL探測器(最終應(yīng)用HALL探測器應(yīng)僅用于開始
2018-12-21 16:34:51
先放下我做的完整永磁同步電機(jī)矢量控制系列仿真框圖我在做仿真前是每個小的仿真分開做的,在各個仿真完成后我把所有的集中在了一個仿真模型里面,公用一個PMSM�����,不再需要復(fù)雜的切換和調(diào)參了��。在模型里我把各個
2021-08-27 06:48:12
項(xiàng)目名稱:空調(diào)壓縮機(jī)FOC無位置傳感器控制器項(xiàng)目介紹:該方案適合應(yīng)用于AC220V供電環(huán)境���, 用于空調(diào)壓縮機(jī)的控制���。 主控MCU采用英飛凌的8位單片機(jī)��,系統(tǒng)采用FOC控制和SVPWM調(diào)制方式���,具有
2018-12-03 14:04:52
框圖不難看出FOC的原理復(fù)雜�����、計(jì)算量大��,所以需要很高成本的控制器��,這也使得FOC在很多應(yīng)用場景下需要設(shè)置更多軟件人才來處理復(fù)雜的演算法。
笙泉BLDC MCU: 應(yīng)用于FOC無感控制為解決以上復(fù)雜
2023-05-08 12:39:25
`AMT49406:無編碼、FOC 無傳感器 BLDC 電機(jī)控制器目前大多數(shù)FOC BLDC驅(qū)動器都需要軟件開發(fā)人員通過微處理器編寫算法實(shí)現(xiàn)對電機(jī)的控制��,但QuietMotion器件集成
2019-02-21 10:46:40
Cortex-M0內(nèi)核���,以8位MCU的價格���,提供32位的性能�����。應(yīng)用套件支持永磁同步電機(jī)(PMSM)常見的各種控制方式如梯形波控制(有/無霍爾傳感器)���、FOC(有/無霍爾傳感器)等��,支持單/雙/三電阻電流采樣,軟件部
2018-12-11 10:54:06
C2000控制器有FOC(無傳感器)算法嗎?
2018-09-07 11:24:16
(轉(zhuǎn))永磁同步電機(jī)(PMSM)的FOC閉環(huán)控制詳解2018年07月19日 14:15:39dz093閱讀數(shù) 2110更多分類專欄:電機(jī)控制在學(xué)習(xí)FOC控制前���,我對于FOC控制完全不懂,只知道中文叫做
2021-08-27 07:08:31
描述 此參考設(shè)計(jì)展示了電機(jī)控制評估套件�����,用于運(yùn)轉(zhuǎn)三相無刷直流和無刷交流 (BLAC) 電機(jī)(通常稱為永磁同步 (PMSM) 電機(jī))��,并以無傳感器磁場定向/矢量控制 (FOC) 為例。此設(shè)計(jì)利
2022-09-22 06:49:17
影響�����,成本和重量增加��,以及驅(qū)動系統(tǒng)更復(fù)雜等���。無傳感器矢量控制則不需要速度/位置傳感器���,因而這些問題也就不復(fù)存在��。近年來,關(guān)于PMSM的無傳感器速度和位置控制方法�����,研究文獻(xiàn)中提出多種解決方案�����。 針對PMSM驅(qū)動
2018-10-10 18:16:43
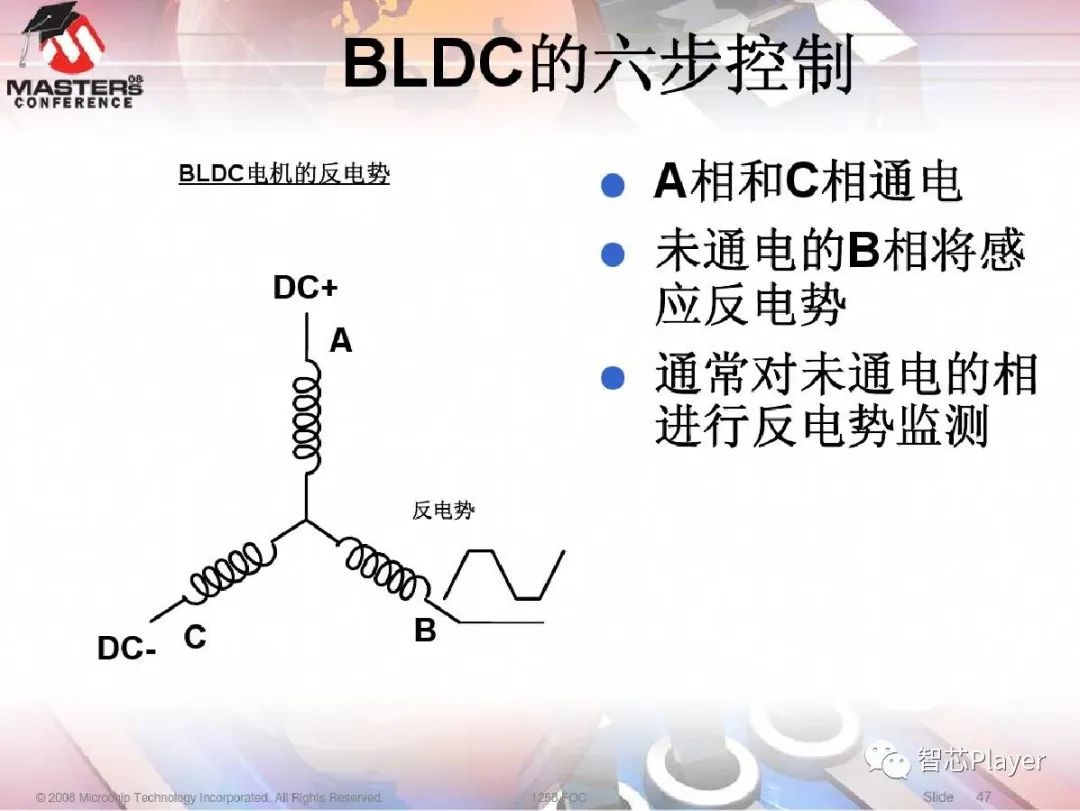
無傳感器馬達(dá)應(yīng)用將大受歡迎。為感應(yīng)無刷直流馬達(dá)(BLDC)及永磁同步馬達(dá)(PMSM)轉(zhuǎn)子位置,馬達(dá)系統(tǒng)須置入磁性傳感器���,以將轉(zhuǎn)子位置資訊回授給控制器并輸出相應(yīng)訊號��,從而驅(qū)動馬達(dá)運(yùn)轉(zhuǎn)。
2014-07-24 08:46:50818 SVPWM的原理及法則推導(dǎo)和控制算法詳解
2016-04-13 15:42:35 15
15 空間矢量控制原理及法則推導(dǎo)和控制算法詳解
2016-05-09 10:59:260 傳感器檢測中的抗干擾技術(shù)詳解��,學(xué)習(xí)資料���,感興趣的可以瞧一瞧�����。
2016-10-26 17:00:400 Sensored FOC of PMSM
2016-12-20 22:56:2247 Sensorless FOC of PMSM_F2833x
2016-12-20 22:56:0110 foc控制算法FOC_stm32主控pmsm源碼
2016-12-20 22:55:40161 PID算法詳解
2016-12-17 20:48:1812 stm32用于PMSM的FOC控制
2017-02-27 16:18:020 FOC(field-oriented control)為磁場導(dǎo)向控制,又稱為矢量控制(vector control)���,是一種利用變頻器(VFD)控制三相交流馬達(dá)的技術(shù),利用調(diào)整變頻器的輸出頻率
2017-12-11 10:50:39107688 
TI傳感器詳解(一) —?溫度傳感器(上)
2018-08-17 02:10:005913 通過本課程學(xué)習(xí)�����,您將:了解一些目前最新的電機(jī)控制設(shè)計(jì)解決方案
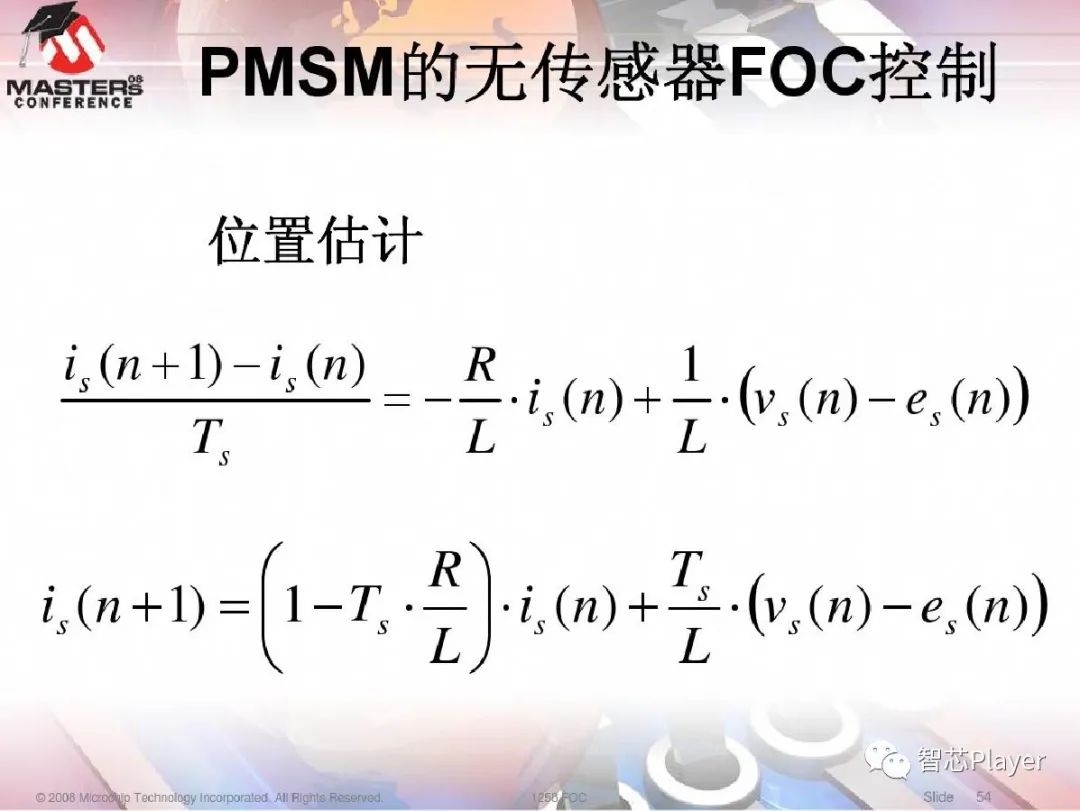
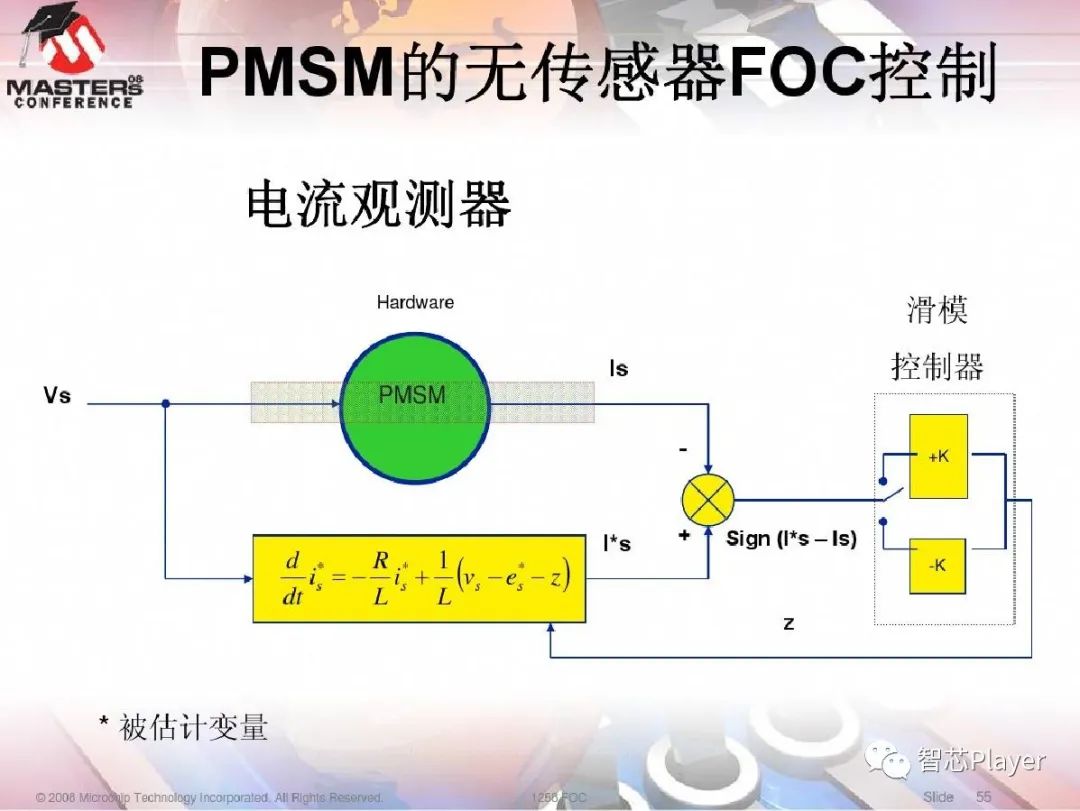
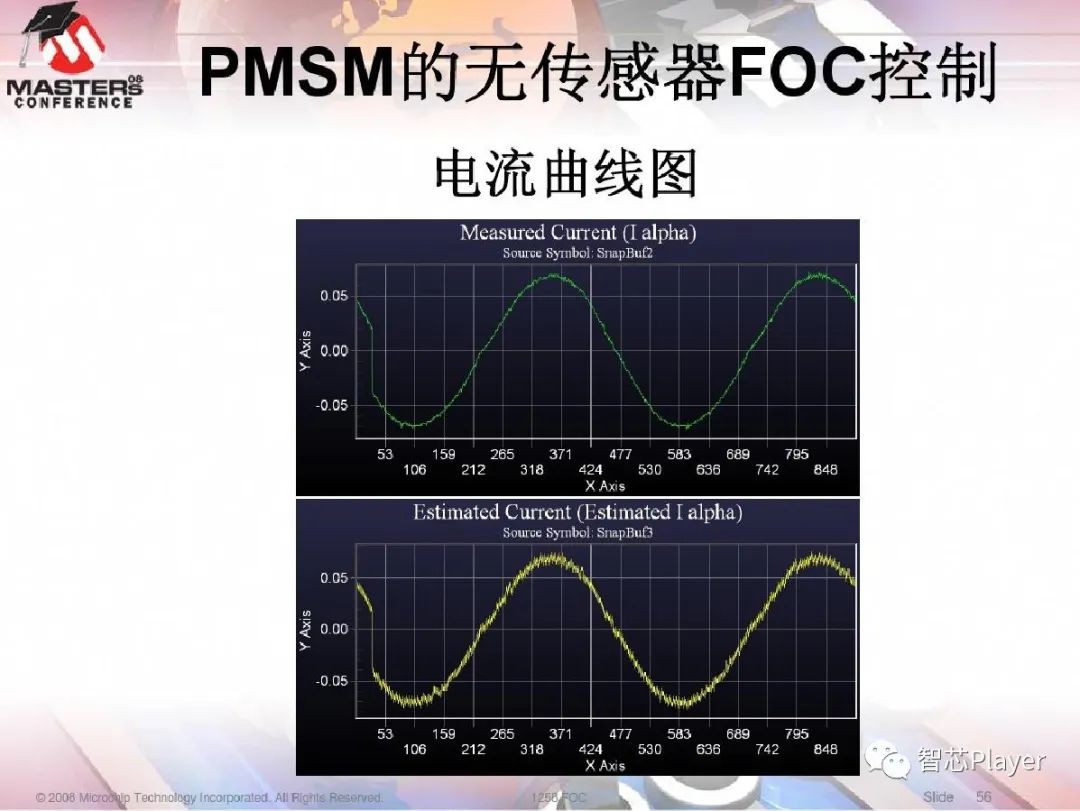
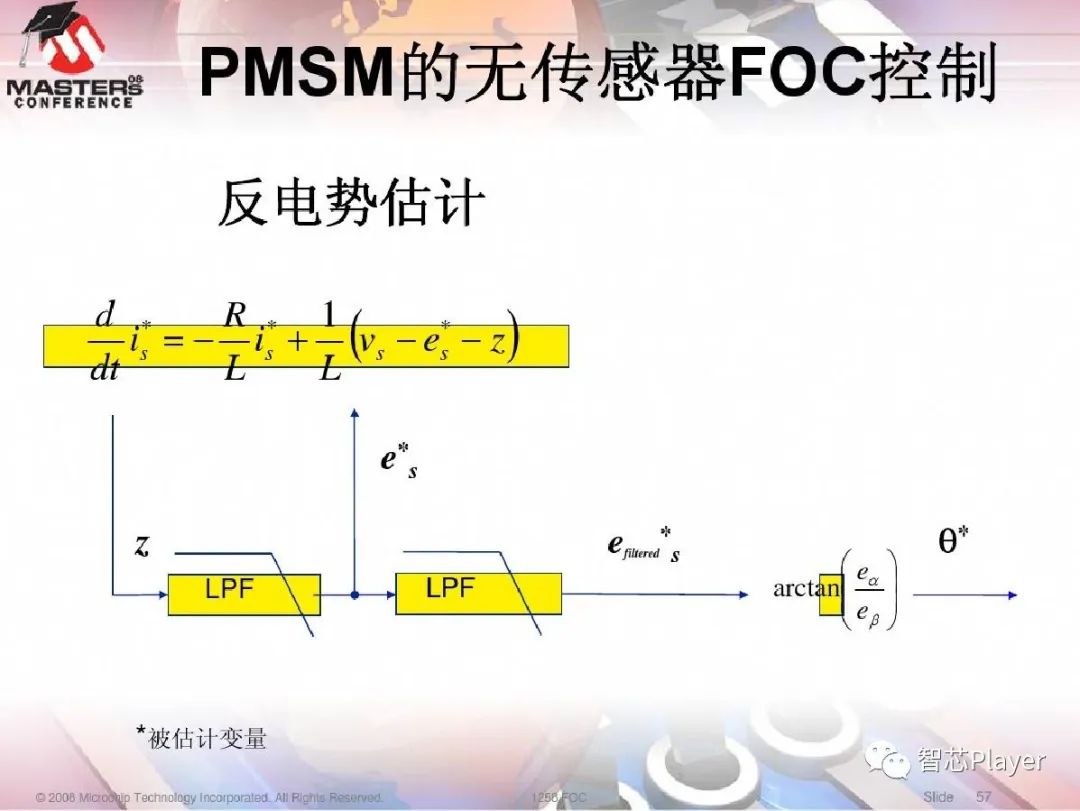
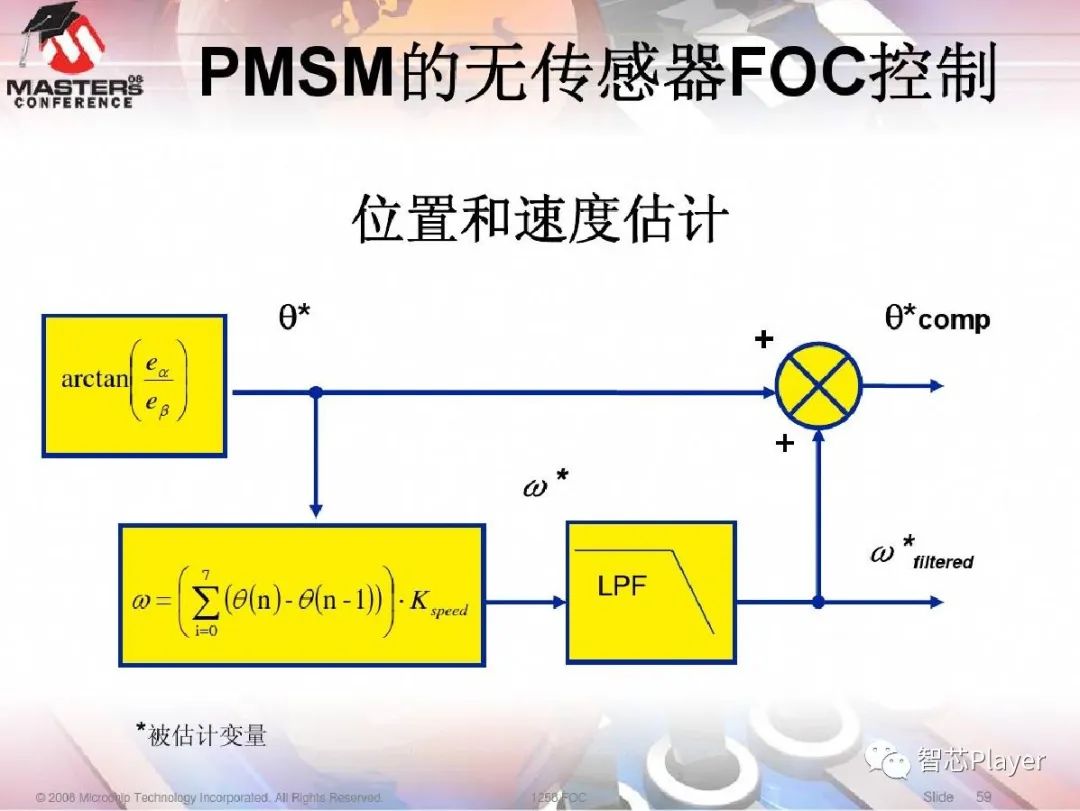
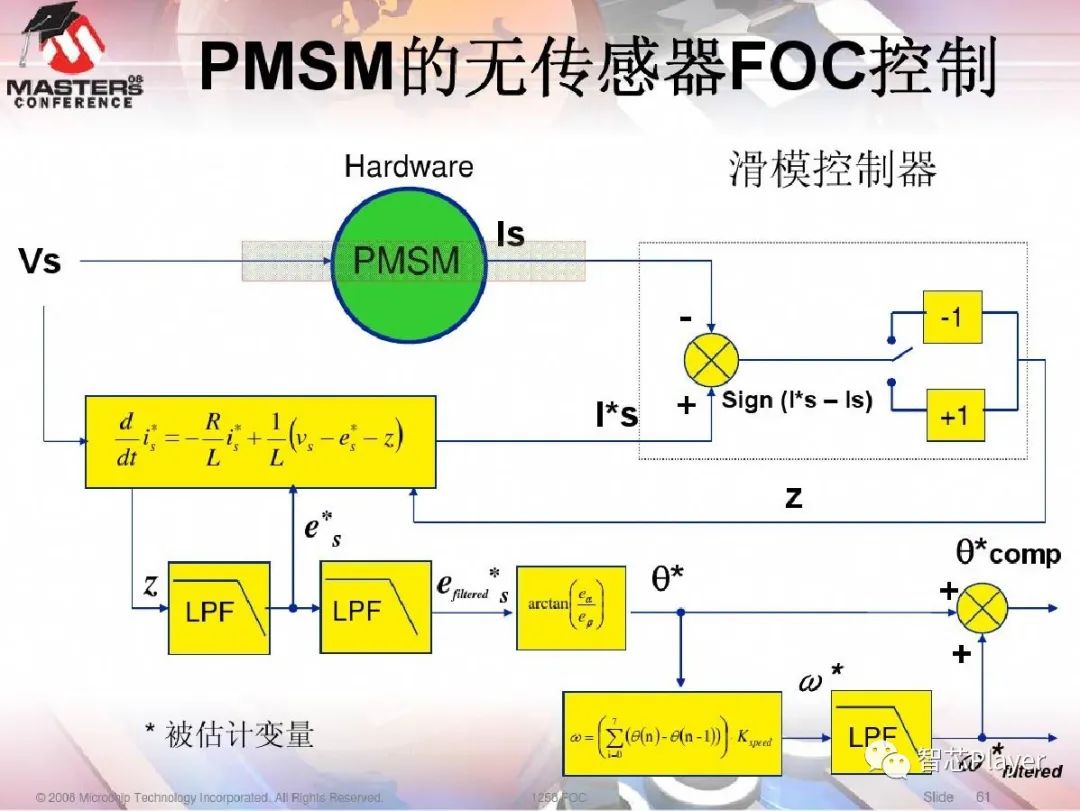
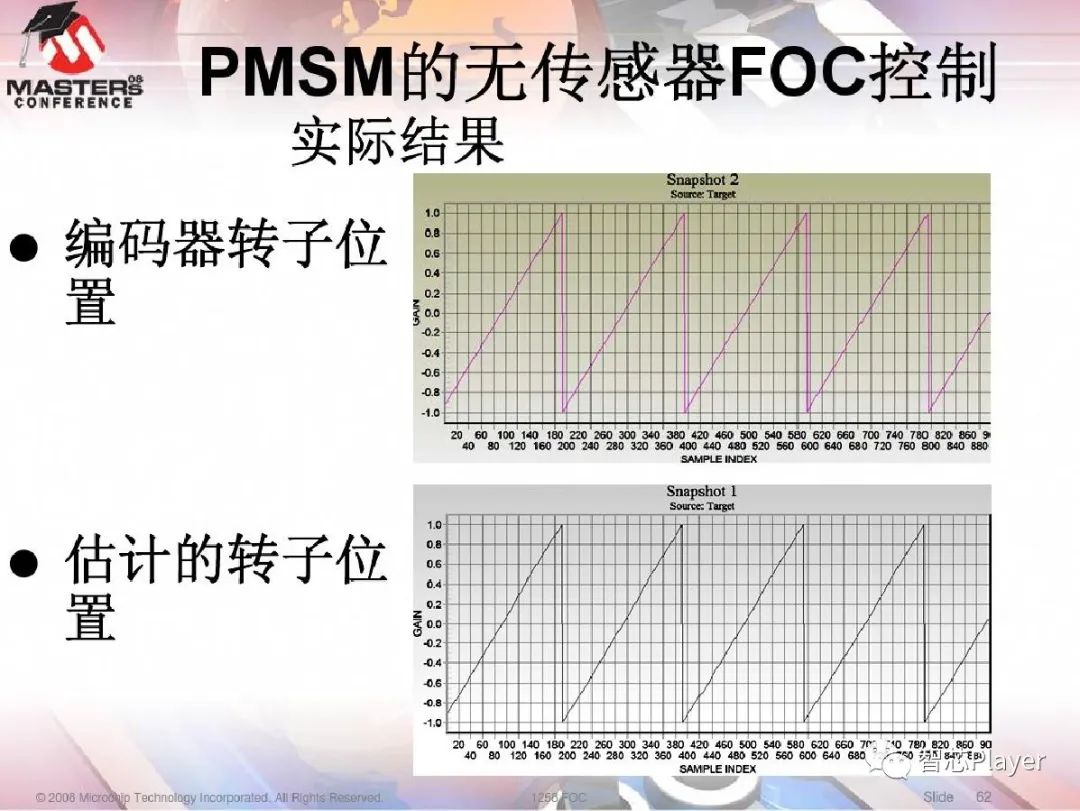
了解一種新的永磁同步電機(jī)( PMSM)無傳感器磁場定向控制(FOC)算法
了解如何查找更多關(guān)于該算法的信息
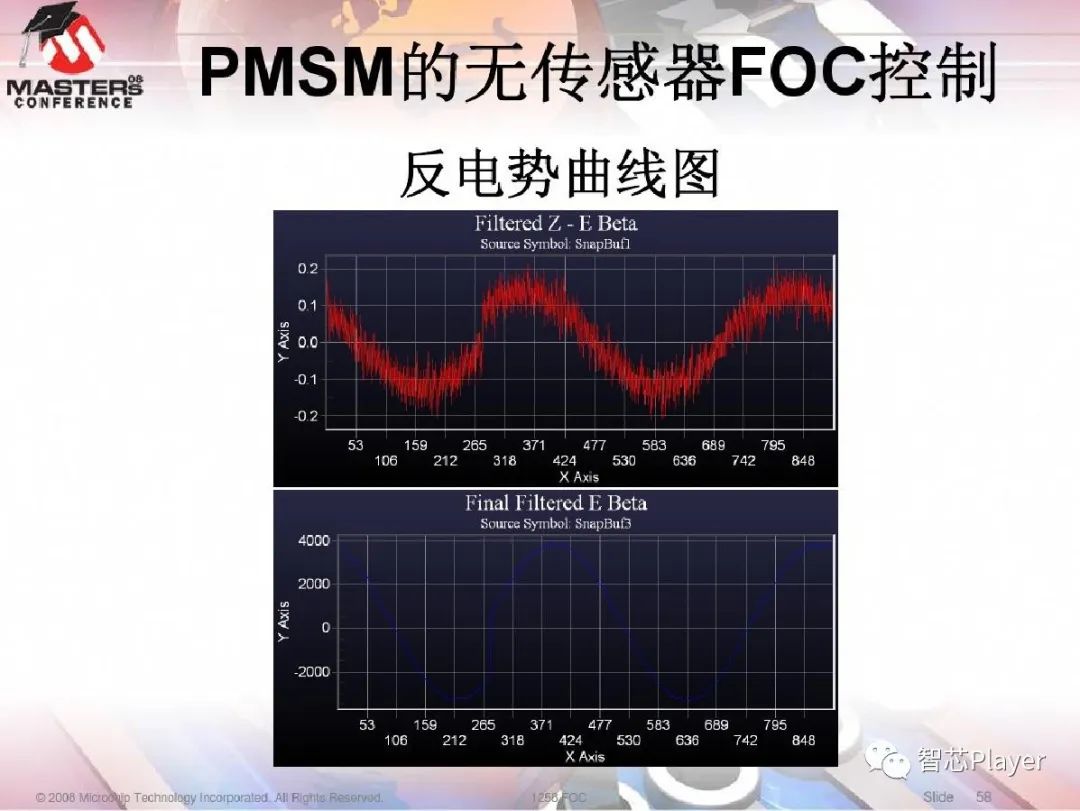
2019-06-05 08:00:0061 本應(yīng)用筆記著重于適用于電器的基于PMSM的無傳感器FOC控制�����,這是因?yàn)樵?b class="flag-6" style="color: red">控制技術(shù)在電器的電機(jī)控制方面有著無可比擬的成本優(yōu)勢。無傳感器 FOC 技術(shù)也克服了在某些應(yīng)用上的限制��,即由于電機(jī)被淹
2021-03-16 16:14:4728 無傳感器PMSM馬達(dá)FOC控制算法詳解電子版
2021-07-16 10:43:510 簡化BLDC馬達(dá)設(shè)計(jì)的FOC控制技術(shù)(開關(guān)電源技術(shù)教程pdf)-簡化BLDC馬達(dá)設(shè)計(jì)的FOC控制技術(shù)? ? ? ? ? ? ? ??
2021-09-18 17:20:20120 無刷馬達(dá)控制的方案 – 帶傳感器/無傳感器
交流感應(yīng)馬達(dá)
BLDC
PMSM馬達(dá)
無傳感器方案的實(shí)現(xiàn)
Starter Kit 可在數(shù)周內(nèi)實(shí)現(xiàn)演示和開發(fā)用戶的項(xiàng)目
2022-11-21 15:17:011 [源代碼]Python算法詳解[源代碼]Python算法詳解
2023-06-06 17:50:170


 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論