















模型層利用OpenGI和MFC類庫,構(gòu)建了一系列底層的類對(duì)象,RobotM利用這些封裝好的類對(duì)象來構(gòu)建場(chǎng)景以及完成場(chǎng)景和用戶的交互。在RobotM設(shè)計(jì)中增加了空間實(shí)體、空間模型、機(jī)器人模型的概念。
空間實(shí)體就是單個(gè)的最簡(jiǎn)單的部件,而空間模型是若干個(gè)實(shí)體按照一定方式的組合。由于機(jī)器人仿真具有一定的特殊性,把機(jī)器人設(shè)定為一個(gè)實(shí)體或者一個(gè)模型顯然是不合適的,所以可以把機(jī)器人以每一個(gè)轉(zhuǎn)軸為界限分割成若干部分,而把分割好的各個(gè)部分都作為空間模型,從而形成了若干空間實(shí)體一空間模型,若干空間模型一機(jī)器人模型的組合方式。
利用這種分層次的組合方式可以很容易控制仿真程序的顯示和交互,例如利用RobotM仿真一個(gè)汽車焊接生產(chǎn)線時(shí),用一個(gè)空間模型對(duì)象來描述汽車對(duì)象可以很容易地控制這個(gè)汽車對(duì)象。RobotM對(duì)于每種空間實(shí)體類型都利用OpenGI提供的GlgenList/glCallList函數(shù)實(shí)現(xiàn)了一套構(gòu)建/繪制的函數(shù),利用空間實(shí)體一空間模型一機(jī)器人模型的組織方式和C++面向?qū)ο蠹夹g(shù)中的多態(tài)性,最終把機(jī)器人模型和空間模型的繪制工作都?xì)w結(jié)為空間實(shí)體對(duì)象的繪制。
RobotM把仿真內(nèi)容保存為流文件。文件是按照分層結(jié)構(gòu)且以相對(duì)路徑存儲(chǔ)并設(shè)計(jì)的,即工作區(qū)、機(jī)器人模型、空間模型、路徑等文件如圖2所示,用戶通過打開工作區(qū)文件從而搜索并獲取其他類型文件的信息以建立場(chǎng)景對(duì)象。機(jī)器人、模型、路徑文件都可以為其他的工程所用,具有比較良好的重用性;相對(duì)路徑使得用戶即使改變了工程目錄存放的位置也不會(huì)影響文件的獲取,增加了RobotM的健壯性。
2.2場(chǎng)景層設(shè)計(jì)
場(chǎng)景層主要功能是完成場(chǎng)景中對(duì)象的建立、保存、繪制以及交互。作為模型層和示教層的中間層,場(chǎng)景層是機(jī)器人仿真系統(tǒng)中的連接部分。場(chǎng)景層從文件建立的過程如圖3所示。
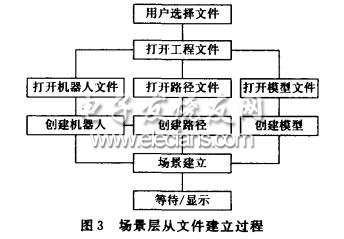
由圖3可以看出場(chǎng)景的建立是一個(gè)從若干文件到仿真程序的空間實(shí)體對(duì)象的轉(zhuǎn)換過程,RobotM把用戶選取的工作區(qū)和其他一系列的文件轉(zhuǎn)化為RobotM 可以識(shí)別的數(shù)據(jù)結(jié)構(gòu)對(duì)象;同樣的,把RobotM中的數(shù)據(jù)結(jié)構(gòu)對(duì)象根據(jù)一定規(guī)則寫入文件完成了保存過程。場(chǎng)景的繪制是仿真程序的重要部分。場(chǎng)景層利用模型層的實(shí)體繪制的接口,通過場(chǎng)景一(機(jī)器人)一空間模型一空間實(shí)體的方式調(diào)用各自的繪制函數(shù),RobotM需要在屏幕上顯示動(dòng)畫來表示仿真結(jié)果,所以程序的繪制效率十分重要。
除了運(yùn)用普通的OpenGI繪制的各種增加效率的方式之外,本文為提高繪圖效率,在RobotM中提出了“必要重構(gòu)”的方法。即利用幾個(gè)BOOI量做為場(chǎng)景的各個(gè)部分(包括機(jī)器人模型、空間模型等部分)的重構(gòu)標(biāo)志(重構(gòu)是指利用OpenGL提供的glGenIist函數(shù)將需要繪制的內(nèi)容保存在內(nèi)存區(qū)域中,每次繪制時(shí)直接從中提取,而不需要再次組織)。RobotM在繪制的每一幀都只重構(gòu)改變過位置或者旋轉(zhuǎn)角度的對(duì)象(機(jī)器人模型和空間模型對(duì)象包括在內(nèi)),而對(duì)于沒有改變的對(duì)象則直接調(diào)用glCallList將對(duì)象繪制出來。這樣每一幀的繪制效率有很大提高,在程序仿真的時(shí)候不會(huì)出現(xiàn)顯示打頓的現(xiàn)象。
基于OpenGI的工業(yè)機(jī)器人三雛仿真設(shè)計(jì)與實(shí)現(xiàn)場(chǎng)景的交互提供給用戶比較便捷的操作功能。用戶根據(jù)自己的需要可以修改觀察和控制整個(gè)場(chǎng)景的方式(如旋轉(zhuǎn)、平移、改變光照等),還可以直接用鼠標(biāo)在場(chǎng)景中選取目標(biāo)點(diǎn)或者空間實(shí)體。
2.3示教層設(shè)計(jì)
示教層主要是完成離線編程設(shè)計(jì)。上2層已經(jīng)為示教層的設(shè)計(jì)打下了良好的基礎(chǔ)。機(jī)器人離線編程的關(guān)鍵內(nèi)容是能夠根據(jù)用戶的輸入確定仿真程序中機(jī)器人的運(yùn)動(dòng)方式和機(jī)器人運(yùn)動(dòng)位置,這種關(guān)系與實(shí)際機(jī)器人和示教盒之間的關(guān)系相類似。RobotM通過保存各個(gè)位置點(diǎn)和各個(gè)點(diǎn)之間的運(yùn)動(dòng)方式來描述機(jī)器人運(yùn)動(dòng)的軌跡來實(shí)現(xiàn)仿真。
RobotM有一個(gè)小型解釋器,他能夠?qū)崿F(xiàn)機(jī)器人編程語言和RobotM能夠識(shí)別的運(yùn)動(dòng)文件格式的相互轉(zhuǎn)換。由于機(jī)器人編程實(shí)現(xiàn)的運(yùn)動(dòng)程序編譯器有自己的語法和語義,所以RobotM必須能夠?qū)崿F(xiàn)控制柜運(yùn)行的機(jī)器人控制文件和RobotM設(shè)計(jì)的程序相互轉(zhuǎn)換。
RobotM提供了2種確定機(jī)器人仿真運(yùn)動(dòng)末端點(diǎn)的方式:即轉(zhuǎn)角運(yùn)動(dòng)和定點(diǎn)運(yùn)動(dòng)。轉(zhuǎn)角運(yùn)動(dòng)如同實(shí)際機(jī)器人運(yùn)動(dòng)中的示教盒示教,能夠通過用戶輸入在仿真程序中,使得指定的機(jī)器人各個(gè)關(guān)節(jié)部分運(yùn)動(dòng),從而實(shí)現(xiàn)機(jī)器人的轉(zhuǎn)角運(yùn)動(dòng);而定點(diǎn)運(yùn)動(dòng)是RobotM中相對(duì)來說比較重要的同時(shí)也是轉(zhuǎn)角運(yùn)動(dòng)無法做到的。利用場(chǎng)景層提供的接口,用glLoadName給場(chǎng)景中的每個(gè)需要確定位置的空間實(shí)體/空間模型/機(jī)器人模型創(chuàng)建惟一標(biāo)示的ID,在用戶鼠標(biāo)選取空間中的點(diǎn)時(shí)利用ID來確定用戶所選取的對(duì)象,在獲取對(duì)象之后利用OpenGI的glUnProjeet函數(shù)獲取鼠標(biāo)點(diǎn)擊位置在空間中的“世界”坐標(biāo)系下的位置,完成鼠標(biāo)平面坐標(biāo)一空間坐標(biāo)的轉(zhuǎn)換,利用仿真機(jī)器人的運(yùn)動(dòng)方法使仿真機(jī)器人末端點(diǎn)運(yùn)動(dòng)到該空間坐標(biāo),從而確定機(jī)器人需要運(yùn)動(dòng)到的某個(gè)點(diǎn)的位置。
通過若干步的上述2種過程的重復(fù),完成這一系列點(diǎn)的設(shè)置,可以創(chuàng)建出路徑文件。路徑文件可以用來仿真也可以下傳到機(jī)器人控制柜。








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
用戶評(píng)論
共 0 條評(píng)論