 關于GD32構建軟硬件自主可控的嵌入式實時控制系統的介紹和應用
關于GD32構建軟硬件自主可控的嵌入式實時控制系統的介紹和應用
本文基于GD32微控制器和RT-Thread實時操作系統,構建了一種軟硬件自主可控的嵌入式實時控制系統。研究了RT-Thread操作系統在GD32芯片開發板上的移植方法和驅動程序改寫,并編寫多任務應用程序測試了系統的運行穩定可靠。為嵌入式控制系統的發展提供了一種技術實現途徑。
引 言
由微控制器和實時操作系統共同構成的嵌入式實時控制系統在工業生產、交通運輸、能源供給、國防裝備等眾多領域被廣泛使用,是實現自動化技術的核心中樞。目前,國內所采用的嵌入式實時控制系統大多基于國外的微控制器芯片和軟件產品,在“棱鏡門”和“Stuxnet病毒”事件后關鍵領域所采用的嵌入式系統安全問題已被國內用戶所重視,發展自主可控、安全可靠的嵌入式實時控制系統已成為必然趨勢。
伴隨微控制器芯片和實時操作系統軟件的不斷發展和日趨成熟,基于國產軟、硬件產品構建自主可控的嵌入式實時控制系統已經具備實現條件。本文采用具有ARM Cortex-M3內核的微控制器GD32F207芯片和RT-Thread實時操作系統建立了一套完全國產化的嵌入式實時控制系統,為國產自主可控嵌入式實時控制系統的建立及應用進行了技術經驗總結和有益探索。
01
嵌入式實時控制系統的構成
嵌入式系統與通用計算機系統在體系結構上具有相似性,都是由主控制器芯片和外圍功能芯片構成硬件電路基礎,再由可提供底層硬件操作功能的軟件作為操作系統,用戶最終通過操作系統對硬件進行訪問和控制;嵌入式系統通常針對某個特定控制任務設計,因而具有實時處理能力、可靠性的要求,通用計算機的處理適用范圍廣,因此更注重兼容性而實時處理能力較弱。
1.1 GD32F207微控制器與開發板
GD32F2系列微控制器芯片為基于ARM Cortex-M3內核架構設計的產品,本文中采用的GD32F207ZET6芯片主頻最高可達120MHz,具有128KB的SRAM和512KB的Flash存儲容量,并且提供UART、ADC、以太網和LCD控制器等眾多外設功能接口,可以很大程度減少所需的外圍功能電路配置。Colibri-F207ZE開發板是基于該芯片設計的一款“口袋實驗室”類型產品,如圖1所示,在板子上有與Arduino平臺引腳布局兼容的引出IO接口之外,還包括TFT顯示屏接口、2個用戶按鍵、3個LED指示燈、1個USB串口和板載GDLINK調試器功能。本文中將以此開發板作為硬件平臺構建嵌入式控制系統。

圖1 Colibri-F207ZE開發板
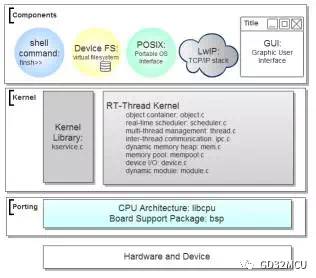
圖2 RT-Thread操作系統層次結構
1.2 RT-Thread實時操作系統
RT-Thread嵌入式實時操作系統的開發始于2006年,并且遵循GPLv2+的版權許可協議。在經過多年的能源、儀表、車輛等行業廣泛使用后,RT-Thread已經被驗證是一款穩定、可靠的嵌入式實時操作系統。從文獻[6]中對RT-Thread與國際主流嵌入式實時操作系統進行的比較中,也可看出其具有優越的性能。RT-Thread系統的結構層次框圖如圖2所示,其中內核層(Kernel)是RT-Thread的關鍵部分涉及時鐘管理、實時調度、任務切換等核心操作;組件層(Components)主要提供Shell交互、文件系統、協議棧等附加操作功能;在內核層與硬件之間是用于系統移植的軟件接口部分(Porting),其實現了操作系統對于硬件的各種具體操作功能。在本文中以最新發布的 RT-Thread 2.1.0版作為移植對象進行分析、代碼修改并最終實現與Colibri-F207ZE開發板共同構成嵌入式實時控制系統。
02
RT-Thread在GD32微控制器上的移植
RT-Thread操作系統已經在GitHub上做了代碼托管,因此可直接從GitHub上下載獲取到RT-Thread 2.1.0版的源代碼壓縮文件包[7]。本文中采用MDK 5.16a版本的ARM開發工具進行移植工作,并需要在MDK的Pack Installer中安裝GD32F2系列芯片的DFP支持包。在移植工作中完成了RT-Thread操作系統的串口通信和LED燈驅動功能,可實現RT-Thread與主機之間的Shell交互操作和對測試程序中運行任務的直接觀察。
2.1 RT-Thread目錄結構的轉換
打開下載得到的RT-Thread源代碼文件包可看到按代碼功能分類的目錄結構,各文件夾所包含的內容和用途分別為:
bsp文件夾:板級支持包,包含針對特定型號微控制器板卡和外部設備的驅動程序。
components:對應RT-Thread操作系統的組件層,包含RT-Thread核心功能之外的大部分附加操作功能以及硬件設備驅動模型。
documentation:RT-Thread編程風格說明,對開發人員和用戶掌握RT-Thread提供指引。
examples:針對RT-Thread操作系統的應用和測試程序示例。
include:RT-Thread操作系統使用的頭文件,可供外部應用程序調用。
libcpu:CPU支持包,包含對各種常見CPU的底層驅動程序,大部分為匯編語言開發。
src:對應RT-Thread操作系統的內核層,包含RT-Thread實時調度、時鐘管理、內存分配、線程管理等全部核心功能。
tools:Scons構建腳本文件,包含用于不同開發工具的各種腳本執行文件。
根據RT-Thread源代碼文件包中各個文件夾的用途,結合GD32芯片所提供的外設固件庫、CMSIS配置文件和Colibri-F207ZE開發板的板級支持包構建基于GD32F207芯片和RT-Thread操作系統的目錄結構,如圖3所示。其中App文件夾中包括RT-Thread的啟動文件startup.c和用戶開發的應用程序;GD32F207ZET6文件夾中包括硬件相關的兩個子文件夾,Colibri_BSP中是開發板的外設驅動程序,GD32F20x_StdPeriph_Driver中是GD32芯片所提供的外設固件庫,芯片驅動、配置和中斷處理文件;Obj文件夾中為MDK所建立的工程文件和存放編譯后得到的axf文件;RT-Thread210文件夾中包含RT-Thread操作系統的各軟件模塊,其為直接從源代碼文件包中相關內容復制而來。
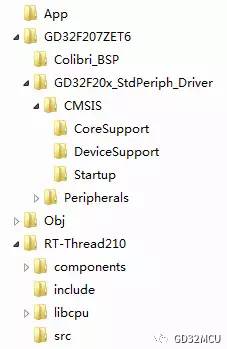
圖3 基于GD32芯片構建的RT-Thread系統目錄結構
2.2 項目工程的建立與驅動程序改寫
在完成上述目錄結構的構建后,需要使用MDK開發工具將RT-Thread源代碼和GD32芯片的相關文件有機結合起來,實現RT-Thread操作系統在Colibri-F207ZE開發板上的移植工作。在MDK工具內部各個文件按照邏輯關系進行分組管理,這里以GD32開頭的組和嵌入式系統硬件相關,以RT開頭的組和操作系統軟件相關,如圖4所示。這種分組結構可有效實現軟硬件隔離,便于日后硬件部分或軟件部分代碼的升級替換工作。
2.2.1 軟硬件配置與代碼修改
在RT-Thread和GD32的配置中采用宏定義方式實現對所需軟件功能模塊的條件編譯和芯片性能參數設置,以達到對嵌入式系統軟、硬件裁剪和配置的目的。因此,在移植過程中需要對這些宏定義進行有選擇的設置。
修改system_GD32f20x.c文件,該文件中主要實現GD32的系統時鐘和AHB、APB總線上掛接各部件的時鐘樹配置,本文中將系統時鐘設置為72MHz。
修改colibri_board.h文件,該文件主要用于設置GD32芯片內、外部RAM的容量,根據本文中所使用的GD32F207ZET6芯片,將內部RAM容量設置為128KB;開發板未擴展外部RAM,將對應的宏定義GD32_EXT_SRAM設置為0。
修改rtconfig.h文件,該文件主要用于RT-Thread操作系統的參數配置以及軟件功能模塊的裁剪。用戶可根據需要設置,保留的軟件功能模塊越多,則編譯后的HEX文件尺寸越大且需要的運行RAM越多。本文中將RT-Thread最大優先級RT_THREAD_PRIORITY_MAX設置為16;每秒節拍數RT_TICK_PER_SECOND設置為100;啟用了控制臺和Shell交互功能RT_USING_CONSOLE和RT_USING_FINSH以方便應用程序調試。
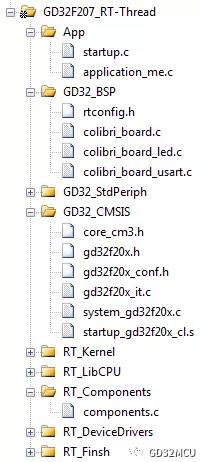
圖4 對GD32芯片和RT-Thread系統文件的分組管理
2.2.2 設備驅動程序的改寫
編寫驅動程序是操作系統移植過程中的重要一步,其用于實現軟件對硬件的最終操作。在RT-Thread中驅動程序屬于Porting層采用了統一的設備驅動模型框架,可以被應用程序通過標準接口函數訪問和調用,在文獻[6,8,9]中對RT-Thread設備驅動框架的構成進行了說明。由于GD32F2系列微控制器與STM32微控制器在系統結構上具有相似性,因此在本文中通過對RT-Thread源代碼文件包中/bsp/stm32f10x/drivers子文件夾內驅動程序進行改寫的方法實現Colibri-F207ZE開發板上串口通信和LED燈的驅動程序。對于GD32芯片上其它功能接口的驅動程序,都可根據需求而參考此種方法進行改寫。
以實現串口通信功能的驅動程序改寫為例,應用程序通過I/O設備模塊中的標準接口函數和設備驅動程序中的函數二者之間映射關系實現對底層I/O設備控制,如圖5所示。其中標準接口函數不需修改,由RT_DeviceDrivers分組中的serial.c文件實現;而串口驅動程序則由GD32_BSP分組中的colibri_board_usart.c文件實現,需要對相應的功能函數和配置進行修改。改寫的內容主要包括替換片上外設訪問層頭文件、實現串口通信功能的芯片管腳定義、rt_hw_usart_init()函數中的串口參數設置和通過rt_hw_serial_register()函數將串口設備注冊到RT-Thread設備驅動框架中,即實現標準接口函數與串口設備之間的關聯。需要注意的是GD32與STM32兩種芯片在各自外設固件庫中提供的結構體定義和函數功能是類似的但是名稱不一致,需要在移植過程中進行修改,表1列出了串口驅動程序colibri_board_usart.c文件中需要修改的結構體和函數名稱。得益于Cortex內核遵循的CMSIS接口標準和RT-Thread所采用的設備驅動框架機制,對設備驅動程序只需做上述少量改寫即可完成不同芯片間的移植工作。
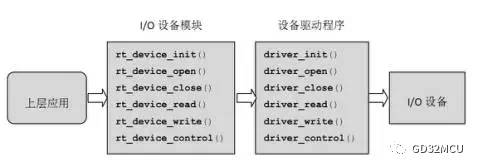
圖5 應用程序操作底層設備的接口函數映射
| 芯片 | STM32 | GD32 | 定義位置 |
| 結構體 | USART_TypeDef | USART_InitPara | gd32f20x_usart.h |
| GPIO_InitTypeDef | GPIO_InitPara | gd32f20x_gpio.h | |
| NVIC_InitTypeDef | NVIC_InitPara | gd32f20x_misc.h | |
| 函數 | USART_Cmd | USART_Enable | gd32f20x_usart.h |
| USART_ITConfig | USART_INT_Set | ||
| USART_GetITStatus | USART_GetIntBitState | ||
| USART_ClearITPendingBit | USART_ClearIntBitState | ||
| USART_GetFlagStatus | USART_GetBitState | ||
| RCC_APB2PeriphClockCmd | RCC_APB2PeriphClock_Enable | gd32f20x_rcc.h |
表1 串口驅動程序中需要修改的結構體和函數名稱
2.3 RT-Thread測試應用程序編寫
開發板在上電后GD32芯片復位,通過文件startup_gd32f20x_cl.s中復位地址處的加載指令調用RT-Thread系統main()函數(位于startup.c文件中),在完成開發板、RT-Thread系統內核、定時器、用戶任務和空閑任務等的初始化后,通過rt_system_scheduler_start()函數啟動RT-Thread調度器實現對各個用戶任務的實時調度。為驗證RT-Thread在Colibri-F207ZE開發板上的移植是否成功,使用rt_thread_init()函數建立兩個用戶任務分別控制兩個LED燈按照0.5秒和1秒的周期閃爍。
03
嵌入式實時控制系統的測試
在完成RT-Thread在Colibri-F207ZE開發板上的移植和測試程序編寫后,將經過MDK編譯得到的axf文件下載到開發板上運行。通過上位機的串口通信工具可以和RT-Thread提供的Shell進行交互操作,并使用相應指令觀察RT-Thread系統運行和RAM的使用情況,如圖6所示。可以看到共有4個任務在運行,其中LED_GREE和LED_RED是控制LED燈閃爍的用戶任務,tshell和tidle分別是系統的shell交互任務和空閑任務;在RT-Thread中注冊有一個設備,就是提供Shell功能的uart1串口。通過該測試程序,表明RT-Thread已經在Colibri-F207ZE開發板上穩定運行,實現了預期的移植效果。
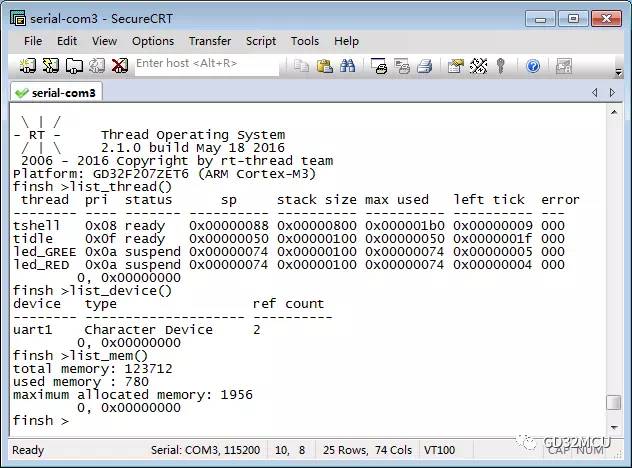
圖6 RT-Thread系統Shell交互界面
結 語
本文基于GD32微控制器和RT-Thread實時操作系統構建了一種嵌入式實時控制系統,其具有軟硬件自主可控、安全可靠的特點為工業生產、國防裝備等軍民應用的關鍵領域提供了有效解決方案。通過本文的研究和探索,在自主可控嵌入式實時控制系統的構建方面積累了技術檢驗,為后期配套應用開發奠定了堅實基礎。
-
微控制器
+關注
關注
48文章
7655瀏覽量
152141 -
嵌入式系統
+關注
關注
41文章
3625瀏覽量
129767 -
計算機
+關注
關注
19文章
7544瀏覽量
88668
發布評論請先 登錄
相關推薦
#新年新氣象,大家新年快樂!#emWin應用開發——基于GD32
基于飛騰騰瓏E2000 CPU的自主可控DCS系統成功投運
嵌入式系統的硬件架構
開啟全新AI時代 智能嵌入式系統快速發展——“第六屆國產嵌入式操作系統技術與產業發展論壇”圓滿結束
【「ARM MCU嵌入式開發 | 基于國產GD32F10x芯片」閱讀體驗】+書籍整體概況
【GD32 MCU 入門教程】GD32 MCU 常見外設介紹(14)RTC 模塊介紹
如何提升嵌入式編程能力?
嵌入式系統基礎

從事嵌入式方向,一定要軟硬件通吃?

再談嵌入式實時操作系統





 工商網監
工商網監
評論