") 機(jī)器人底盤(pán)種類(lèi)介紹
機(jī)器人底盤(pán)種類(lèi)介紹

要實(shí)現(xiàn)機(jī)器人的自主移動(dòng),定位導(dǎo)航技術(shù)是關(guān)鍵,由于定位導(dǎo)航技術(shù)在實(shí)現(xiàn)上具有很高的門(mén)檻,基于機(jī)器人底盤(pán)直接進(jìn)行上層開(kāi)發(fā)的機(jī)器人企業(yè)越來(lái)越多。它可幫助機(jī)器人企業(yè)降低研發(fā)成本,快速搶占市場(chǎng)先機(jī)。
機(jī)器人底盤(pán)集成了眾多不同的傳感器,包括激光雷達(dá)、視覺(jué)、超聲波、紅外傳感器等,以及輪子等必要的懸掛。而將這些硬件進(jìn)行集合的,則是相應(yīng)的算法及軟件。
穩(wěn)定性檢驗(yàn)機(jī)器人底盤(pán)好壞最為重要的標(biāo)準(zhǔn),其次還包括了能耗、承載能力及后期的維護(hù)成本等。
不同的機(jī)器人產(chǎn)品對(duì)底盤(pán)的要求也不相同,如掃地機(jī)器人需要低成本的激光導(dǎo)航方案,其他服務(wù)機(jī)器人需要兼具靈活性與安全性的激光雷達(dá)+視覺(jué)的導(dǎo)航方案,工業(yè)AGV則需要更具精準(zhǔn)性的導(dǎo)航方案。
根據(jù)機(jī)器人底盤(pán)種類(lèi)的不同,目前,市面的機(jī)器人底盤(pán)主要有履帶式及輪式機(jī)器人底盤(pán)之分。
履帶式機(jī)器人底盤(pán)
履帶式機(jī)器人底盤(pán)在特種機(jī)器人身上使用較多,可適用于野外、城市環(huán)境等,能在各類(lèi)復(fù)雜地面運(yùn)動(dòng),例如沙地、泥地等,但速度相對(duì)較低,且運(yùn)動(dòng)噪聲較大。
輪式機(jī)器人底盤(pán)
輪式機(jī)器人底盤(pán)是目前服務(wù)機(jī)器人企業(yè)使用較多的底盤(pán),主要有前輪轉(zhuǎn)向后輪差速驅(qū)動(dòng)、兩輪驅(qū)動(dòng)+萬(wàn)向輪、四輪驅(qū)動(dòng)之分。
1.前輪轉(zhuǎn)向+后輪驅(qū)動(dòng)
前輪轉(zhuǎn)向+后輪驅(qū)動(dòng)的輪式機(jī)器人底盤(pán)主要采用電缸、蝸輪蝸桿等形式實(shí)現(xiàn)前輪轉(zhuǎn)向,后輪只要一個(gè)電機(jī)再加上差速減速器,便可完成機(jī)器人的移動(dòng)要求。具有成本低、控制簡(jiǎn)單等優(yōu)缺點(diǎn),但缺點(diǎn)在于轉(zhuǎn)彎半徑較大,使用相對(duì)不那么靈活。
2.兩輪驅(qū)動(dòng)+萬(wàn)向輪
兩輪驅(qū)動(dòng)+萬(wàn)向輪可根據(jù)機(jī)器人對(duì)設(shè)計(jì)重心、轉(zhuǎn)彎半徑的要求,將萬(wàn)向輪和驅(qū)動(dòng)輪布置不同的形式,結(jié)構(gòu)及電機(jī)控制也相對(duì)簡(jiǎn)單,機(jī)器人靈活性較強(qiáng),且算法易控制。
3.四輪驅(qū)動(dòng)
四輪驅(qū)動(dòng)在直線行走上能力較強(qiáng),驅(qū)動(dòng)力也比較大,但成本過(guò)高,電機(jī)控制較為復(fù)雜,為防止機(jī)器人打滑,需要更精細(xì)的結(jié)構(gòu)設(shè)計(jì)。
從靈活性上來(lái)說(shuō),兩輪驅(qū)動(dòng)+萬(wàn)向輪的輪式機(jī)器人底盤(pán)更具優(yōu)勢(shì),思嵐科技的機(jī)器人底盤(pán)ZEUS就采用了這種結(jié)構(gòu)的設(shè)計(jì)。它能做到自主定位建圖、路徑規(guī)劃及自主避障等功能,可在各種障礙物之間穿梭自如。
ZEUS機(jī)器人底盤(pán)作為底盤(pán)界的老大,不僅能識(shí)別周?chē)h(huán)境,還能清楚了解自己所在位置,同時(shí)采用SharpEdge構(gòu)圖技術(shù),構(gòu)建厘米級(jí)高精度地圖。
除了搭載自主研發(fā)的雷達(dá)及定位導(dǎo)航系統(tǒng), ZEUS還配備了深度攝像頭、超聲波、防跌落等傳感器,保證機(jī)器人的安全運(yùn)行,防止機(jī)器人出現(xiàn)碰撞現(xiàn)象。
當(dāng)然,ZEUS不僅為機(jī)器人提供了最基本的行走能力,同時(shí)還支持虛擬墻和虛擬軌道、自主返回充電、第三方應(yīng)用拓展及樓層建圖導(dǎo)航,自動(dòng)電梯控制等多種功能。
在機(jī)器人行業(yè)日益火熱的現(xiàn)狀下,機(jī)器人底盤(pán)的出現(xiàn)無(wú)疑降低了其他企業(yè)進(jìn)入機(jī)器人行業(yè)的門(mén)檻,同時(shí),也為移動(dòng)機(jī)器人的規(guī)模化發(fā)展鋪平道路。
發(fā)布評(píng)論請(qǐng)先 登錄
10cm隔空充電!磁共振無(wú)線充電如何讓電力巡檢機(jī)器人“永不斷電”?
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
詳細(xì)介紹機(jī)場(chǎng)智能指路機(jī)器人的工作原理
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】視覺(jué)實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
名單公布!【書(shū)籍評(píng)測(cè)活動(dòng)NO.58】ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐
不同類(lèi)型機(jī)器人及其所需的滑環(huán)種類(lèi)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+兩本互為支持的書(shū)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
鴻蒙機(jī)器人與鴻蒙開(kāi)發(fā)板聯(lián)動(dòng)演示
七騰機(jī)器人:防爆輪式機(jī)器人-四輪八驅(qū)全新上線

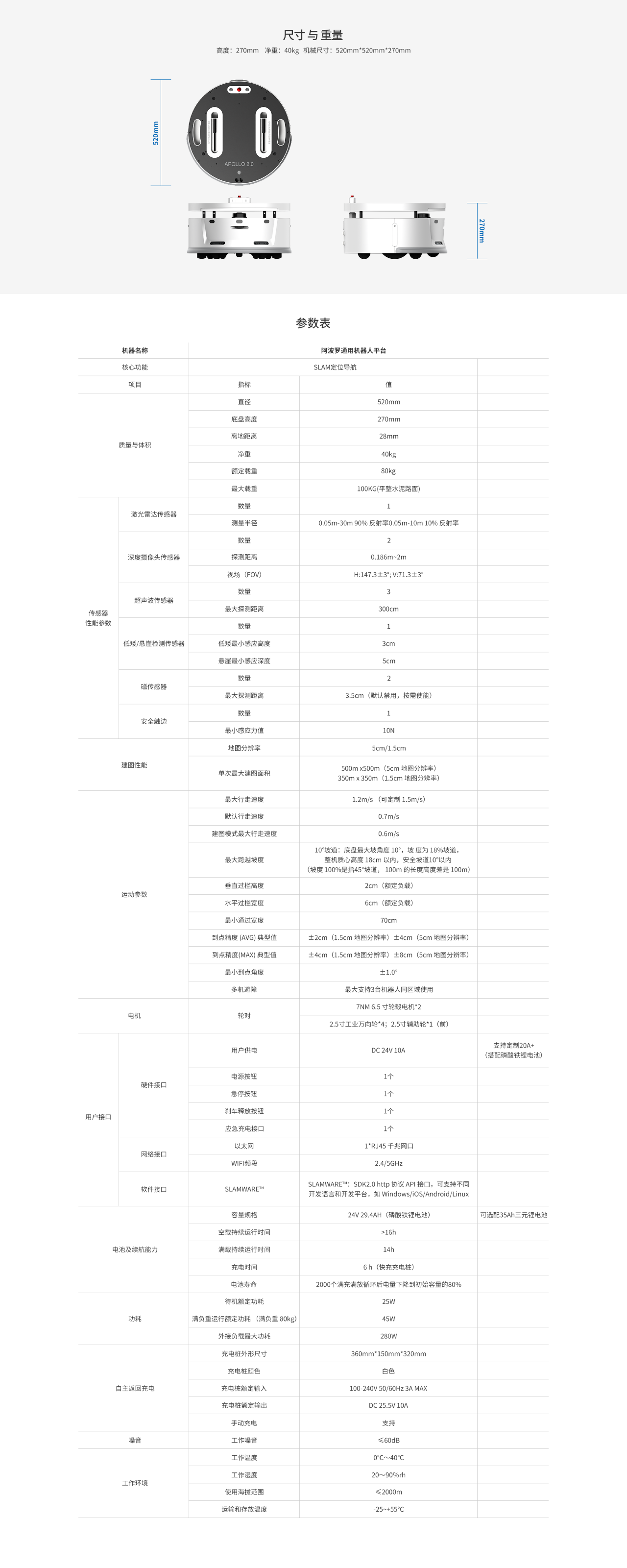
思嵐科技全場(chǎng)景機(jī)器人底盤(pán)Apollo2.0的特性





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論