") 關(guān)于汽車?yán)走_(dá)探頭的分析和發(fā)展介紹
關(guān)于汽車?yán)走_(dá)探頭的分析和發(fā)展介紹

自主駕駛當(dāng)前引領(lǐng)全球,此趨勢將來定會(huì)加速發(fā)展。這一領(lǐng)域的關(guān)鍵技術(shù)是汽車?yán)走_(dá)探頭,它是朝向更舒適駕駛、防撞,甚至是自動(dòng)駕駛邁出的重要一步。駕駛員輔助系統(tǒng)已經(jīng)很普遍,這類系統(tǒng)在許多方面都由雷達(dá)支持。
今天的24 GHz、77 GHz和79 GHz汽車?yán)走_(dá)探頭顯然需要能夠測量和分辨不同物體,同時(shí)在任何城市或鄉(xiāng)村環(huán)境都要能提供高距離分辨率、徑向速度分辨率和方位角分辨率。一個(gè)非常重要的特性是對來自其他汽車?yán)走_(dá)探頭的干擾有良好抗擾性。由于目前市場對雷達(dá)探頭的接受程度不高,這個(gè)話題一直不太受關(guān)注。然而,迅速擴(kuò)大和預(yù)期增長都在持續(xù)增加,高級(jí)駕駛員輔助系統(tǒng)(Advanced Driver Assistance Systems, ADAS) 市場預(yù)計(jì)每年增長高達(dá)10%。考慮到每年有7200萬輛新車注冊,按每輛車平均3個(gè)(或更多)汽車?yán)走_(dá)探頭計(jì)算,未來每年大約有2億多個(gè)新的汽車?yán)走_(dá)探頭行走在大街小巷。因此,24 GHz,以及76 GHz到81 GHz頻譜將被大量占用。汽車?yán)走_(dá)探頭需要應(yīng)對相互干擾,并且要提供信號(hào)分集和干擾抑制技術(shù)。涉及正在研發(fā)的自動(dòng)汽車的偶發(fā)小事故已見諸報(bào)端。2016年5月,在涉及部分實(shí)現(xiàn)自動(dòng)駕駛的汽車的第一起致命事故后,關(guān)于自動(dòng)駕駛汽車安全性和這類技術(shù)安全性的問題再次被提起。因此,在存在相互干擾的任何環(huán)境下都必須確保探測設(shè)備功能不變。
本文介紹目前最先進(jìn)的下一代汽車?yán)走_(dá)信號(hào)和探頭的理論背景。文中解釋了相互干擾的影響,并提出了在具有各類典型干擾的任意射頻環(huán)境中,測試和驗(yàn)證干擾抑制技術(shù)的測量可能性。這種方法可幫助研究和開發(fā)人員,設(shè)計(jì)出即使在惡劣射頻環(huán)境也能按技術(shù)指標(biāo)可靠工作的汽車?yán)走_(dá)探頭。
汽車?yán)走_(dá)和法規(guī)
如果幾個(gè)汽車?yán)走_(dá)探頭工作在頻段[1]中的相同部分,以及各自的工作頻率非常靠近時(shí),可能相互干擾(參閱圖1)。可能的情況是人為虛假(ghost) 目標(biāo)的建立或檢測概率的降低。虛假目標(biāo)在現(xiàn)實(shí)中不存在,但對于雷達(dá)探頭卻作為真實(shí)目標(biāo)出現(xiàn)。這可能由已發(fā)射信號(hào)的副本引起。該副本不是來自原始雷達(dá)發(fā)射機(jī),但是落入接收機(jī)帶寬中,并作為真實(shí)回波信號(hào)被處理。只有在兩個(gè)或多個(gè)雷達(dá)之間的定時(shí)、波形和頻率必須匹配,并且回波信號(hào)功率必須超過一定限值時(shí),才會(huì)發(fā)生這種情況。
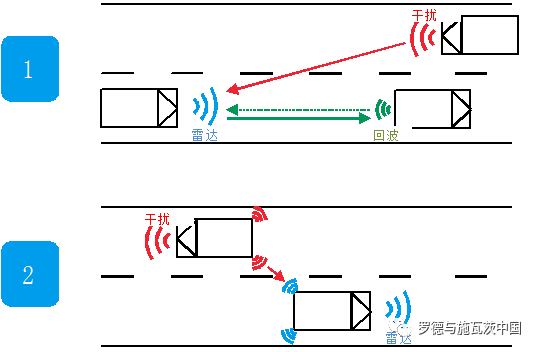
圖 1:干擾場景舉例
此外,落入接收機(jī)帶寬中具有一定功率電平的任意射頻信號(hào),會(huì)增加雷達(dá)的本底噪聲并降低對目標(biāo)的信噪比 (Signal To Noise, SNR)。這可能導(dǎo)致雷達(dá)截面積 (Radar Cross Section, RCS) 較小的目標(biāo)消失,因?yàn)檫@些回波的信噪比減小。只有經(jīng)FFT信號(hào)處理后在所有頻率上擴(kuò)散的信號(hào)必須落入接收機(jī)帶寬內(nèi)時(shí),才會(huì)發(fā)生這種情況。
汽車?yán)走_(dá)探頭的輸出功率由電子通信委員會(huì) (Electronic Communications Committee , ECC) 規(guī)定。基于題為“指定77-81GHz頻段用于汽車短程雷達(dá)”的ECC決定 (04) 03,歐洲郵政和電信管理會(huì)議 (European Conference of Postal and Telecommunications Administrations, CEPT) 指定將79GHz頻率范圍,在無干擾且不采用保護(hù)措施的場景下用于短程雷達(dá) (Short Range Radar, SRR) 設(shè)備。此外,定義了與峰值限值為55 dBm 有效全向輻射功率 (Equivalent Isotropic Radiated Power, EIRP)相關(guān)的-3dBm / MHz有效全向輻射功率的最大平均功率密度,并且由一個(gè)短程雷達(dá)設(shè)備運(yùn)行產(chǎn)生的車輛外部最大平均功率密度不得超過-9 dBm / MHz有效全向輻射功率。工作在這些頻段中的所有標(biāo)準(zhǔn)汽車?yán)走_(dá)探頭必須滿足這個(gè)決定。ETSI標(biāo)準(zhǔn)EN 301 091-1和EN 301 091-2 [7]已經(jīng)對77 GHz雷達(dá)的相關(guān)測試條件、功率發(fā)射和雜散輻射等幾個(gè)方面進(jìn)行了標(biāo)準(zhǔn)化,但沒有提及任何關(guān)于干擾抑制的內(nèi)容。對于規(guī)定了79GHz頻段的ETSI標(biāo)準(zhǔn)EN 302 264-1和EN 302 264-2 [8]也是如此。
例如,在海事領(lǐng)域,導(dǎo)航雷達(dá)必須遵守國際電工委員會(huì) (International Electrotechnical Commission, IEC) 標(biāo)準(zhǔn)IEC 62388 [2]。該標(biāo)準(zhǔn)規(guī)定了最基本的運(yùn)行和性能要求、測試方法,以及按照無線電通信設(shè)備/系統(tǒng)性能標(biāo)準(zhǔn)要求的測試結(jié)果。IEC標(biāo)準(zhǔn)中一個(gè)非常重要方面是干擾抑制規(guī)范。然而,對于汽車雷達(dá)技術(shù)規(guī)范,類似導(dǎo)航雷達(dá)幾十年來經(jīng)歷的,沒有定義干擾抑制或性能的標(biāo)準(zhǔn)以及測試方法。
汽車?yán)走_(dá)波形和干擾影響
如果干擾信號(hào)落入雷達(dá)接收機(jī)帶寬中,就此而言,它應(yīng)當(dāng)被檢測到并在信號(hào)處理過程中被抑制。每個(gè)制造商采用的波形、定時(shí)、帶寬、天線方向圖和信號(hào)處理方式通常略有不同。就干擾抑制而言這或許是個(gè)優(yōu)點(diǎn),但也導(dǎo)致雷達(dá)對干擾的響應(yīng)不同。
今天的汽車?yán)走_(dá)探頭中主要使用兩種不同類型的波形。盲點(diǎn)檢測 (Blind Spot Detection, BSD) 雷達(dá)經(jīng)常使用多進(jìn)制頻移鍵控 (Multi-Frequency Shift Keying, MFSK) 雷達(dá)信號(hào),并且主要工作在24GHz頻段。工作在77 GHz或79 GHz頻段的雷達(dá)經(jīng)常使用線性調(diào)頻連續(xù)波 (Linear Frequency Modulated Continuous Wave, LFMCW) 信號(hào)或線性調(diào)頻序列 (Chirp Sequence, CS) 信號(hào),后者是一種特殊形式的LFMCW信號(hào)。
使用LFMCW,雷達(dá)在一定時(shí)間內(nèi)(稱為相干處理間隔 TcpI)發(fā)射具有特定帶寬 fsweep的調(diào)頻信號(hào)(線性調(diào)頻),如圖2所示。
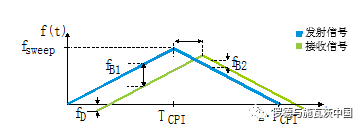
圖2:采用上行線性調(diào)頻和下行線性調(diào)頻的LFMCW雷達(dá)
雷達(dá)用瞬時(shí)發(fā)射頻率下變頻接收的信號(hào),并測量差頻fB,fB描述與原始發(fā)射波形的偏移。兩個(gè)雷達(dá)參數(shù),范圍R和徑向速度Vr,都與測量的差頻fB相關(guān)。為了無模糊地求解目標(biāo)Vr和R,必須進(jìn)行兩次差頻測量(如圖2所示),其中兩個(gè)差頻分別表示為fB1和fB2 。在多目標(biāo)情況,用不同差頻的兩組連續(xù)線性調(diào)頻信號(hào),不能無模糊地求解距離和徑向速度。這可以通過使用額外的具有不同斜率的線性調(diào)頻信號(hào)來解決。
為了實(shí)現(xiàn)一定的徑向速度分辨率,TcpI通常在20ms范圍內(nèi),并且單次處理間隔內(nèi)線性調(diào)頻數(shù)目大于2。fsweep決定了距離分辨率, fsweep在幾百M(fèi)Hz間變化,在不久的將來其變化范圍可達(dá)1GHz以上,在未來可能是4 GHz甚至5 GHz。
另一種波形稱為線性調(diào)頻序列(CS),它由幾個(gè)非常短的LFMCW線性調(diào)頻連續(xù)波組成,每個(gè)線性調(diào)頻持續(xù)時(shí)間為Tchirp ,采用塊長度TcpI 發(fā)射(參閱圖3)。由于單個(gè)線性調(diào)頻非常短,所以差頻fB主要受信號(hào)傳播時(shí)間影響,并且多普勒頻移fD可以忽略不計(jì)。
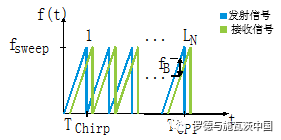
圖3:線性調(diào)頻序列
在經(jīng)過用瞬時(shí)載波頻率初始下變頻和對每個(gè)線性調(diào)頻實(shí)施傅立葉變換后,信號(hào)處理便開始了。由于高載波頻率和高線性調(diào)頻率,差頻主要由距離決定。計(jì)算目標(biāo)距離R時(shí),假定徑向速度Vr =u/s在單個(gè)線性調(diào)頻期間不測量徑向速度,而是在持續(xù)時(shí)間為TcpI的連續(xù)線性調(diào)頻塊上測量。沿時(shí)間軸執(zhí)行第二次傅立葉變換,得到多普勒頻移fD。 在獲得多普勒頻移之后,便可校正目標(biāo)距離。
雖然單個(gè)Tchirp通常在10μs到100μs范圍內(nèi),但是信號(hào)LN的數(shù)量應(yīng)當(dāng)高到使得整個(gè)相干處理間隔TcpI=LNTchirp再次在幾十毫秒的范圍內(nèi),以實(shí)現(xiàn)期望的徑向速度分辨率。
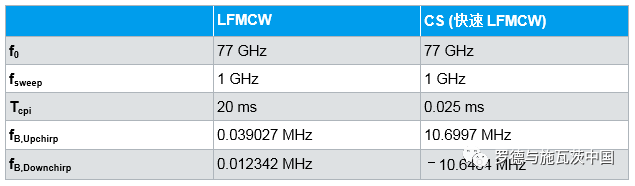
信號(hào)帶寬大,與之相比接收機(jī)帶寬非常小。由于事實(shí)上僅測量雷達(dá)設(shè)計(jì)的最大差頻,這是可以實(shí)現(xiàn)的。為了給出兩個(gè)示例,表1顯示了當(dāng)目標(biāo)徑向速度為50m / s、距離在40米范圍內(nèi)時(shí),采用兩種汽車?yán)走_(dá)波形的差頻。
這些計(jì)算依據(jù)LFMCW方程,并且顯示LFMCW的差頻在幾百kHz范圍內(nèi),但CS雷達(dá)(幾MHz)的差頻顯然高得多。這導(dǎo)致接收機(jī)帶寬更大,并且與使用LFMCW時(shí)所用的技術(shù)相比可能需要不同的干擾抑制技術(shù)。
表 1:使用LFMCW 和CS信號(hào)的 77 GHz 雷達(dá),以及目標(biāo)采用50m/s徑向速度且距離在40米范圍內(nèi)的預(yù)期差頻。
與LFMCW相比,CS的優(yōu)點(diǎn)是無模糊和提高了更新速率,因?yàn)閱蝹€(gè)相干處理間隔 (TcpI) 足以測量和分辨觀察范圍內(nèi)的所有目標(biāo)。在LFMCW中,至少需要3種不同的線性調(diào)頻信號(hào)。另一方面,在CS波形中,由于多次FFTs和接收機(jī)帶寬要根據(jù)預(yù)期的差頻而縮放,處理復(fù)雜度增加,這就是需要干擾抑制和干擾緩解技術(shù)的原因。
圖4描述了當(dāng)存在干擾信號(hào)(紅色線性調(diào)頻)時(shí)的下變頻和傅里葉變換過程。干擾線性調(diào)頻與物體的雷達(dá)回波一起下變頻。綠色表示某個(gè)范圍的恒定差頻,它會(huì)在無干擾環(huán)境中測量單個(gè)目標(biāo)時(shí)產(chǎn)生。隨著干擾信號(hào)的引入,產(chǎn)生與時(shí)間相關(guān)的差頻(紅色曲線),伴隨著期望的回波信號(hào)。因此,在傅里葉域中,頻譜不僅顯示單個(gè)差頻,而且顯示若干頻率。在最優(yōu)解中,回波信號(hào)(綠色條)的信噪比最大。當(dāng)存在干擾信號(hào)時(shí),本底噪聲上升,并且信噪比隨接收機(jī)帶寬fLP 的增大而減小,如圖所示。除了檢測概率降低外,回波信號(hào)的較低信噪比也會(huì)導(dǎo)致距離和多普勒頻移測量的精度降低。
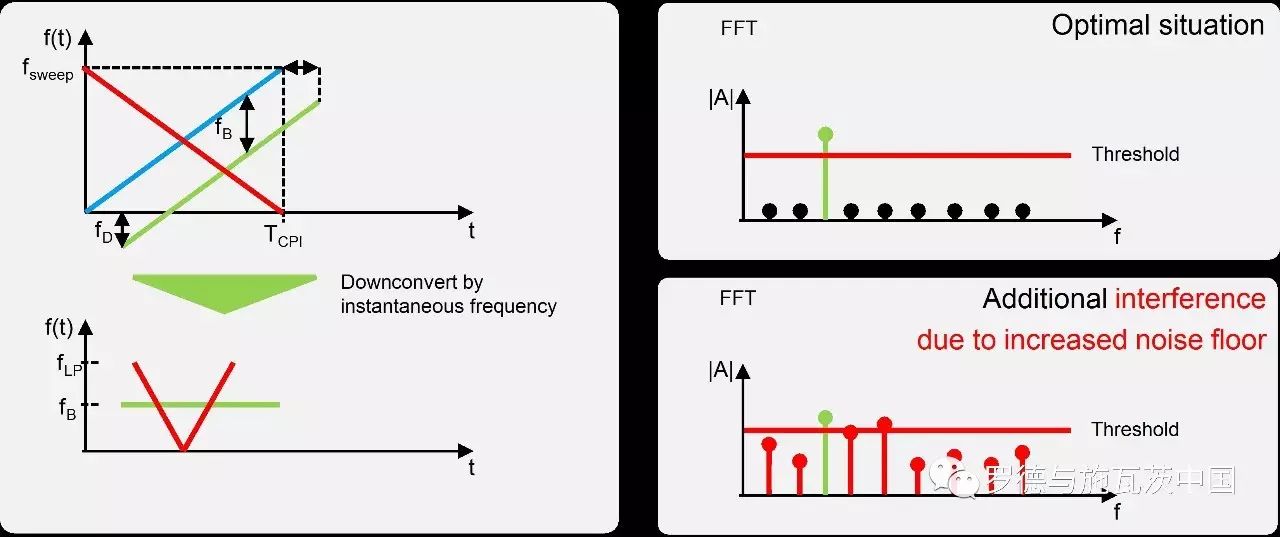
圖 4:干擾信號(hào)影響
接收機(jī)本底噪聲和物體對應(yīng)的信噪比取決于硬件、軟件和物體的雷達(dá)截面積。對于工作在77 GHz的汽車?yán)走_(dá),典型的本底噪聲電平約為-90 dBm。一種趨勢是將線性調(diào)頻序列波形與諸如頻移鍵控等其它方法組合,以便減少計(jì)算量。然而,截至今天,對于汽車?yán)走_(dá)探頭,還沒有標(biāo)準(zhǔn)給出規(guī)范性的干擾和干擾抑制的通用定義。
干擾抑制測試和測量
為了驗(yàn)證抗干擾方法的性能和測試?yán)走_(dá)探頭的干擾魯棒性,需要在能夠生成任意射頻信號(hào)的實(shí)驗(yàn)室中搭建測量環(huán)境。例如,這些信號(hào)甚至可以包括發(fā)射機(jī)位置、天線移動(dòng)和天線方向圖。
圖5顯示來自羅德與施瓦茨公司的脈沖序列發(fā)生器軟件生成的典型雷達(dá)干擾信號(hào),諸如線性調(diào)頻連續(xù)波(LFMCW)、頻移鍵控(Frequency Shift Keying, FSK)和線性調(diào)頻序列(CS)。應(yīng)當(dāng)提及的是,該軟件不限于生成這些信號(hào)或序列,它還可以為實(shí)驗(yàn)室建立復(fù)雜的射頻環(huán)境[3]。
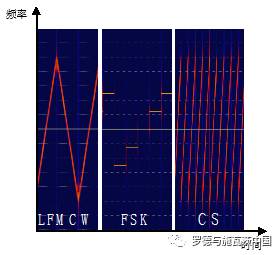
圖5:典型連續(xù)波雷達(dá)信號(hào)
雖然這些信號(hào)可以在基帶產(chǎn)生,但將這些信號(hào)上變頻到E-band是個(gè)挑戰(zhàn)。由于大多數(shù)汽車?yán)走_(dá)只使用調(diào)頻信號(hào),一種方法是使用先進(jìn)的矢量信號(hào)發(fā)生器結(jié)合倍頻器。這樣配置的優(yōu)點(diǎn)是測試裝置不太復(fù)雜并且可以較容易實(shí)現(xiàn)大信號(hào)帶寬,因?yàn)楸额l器也能縮放信號(hào)帶寬[5]。在基帶中設(shè)計(jì)波形時(shí),可以輕松考慮縮放因子。
圖6為汽車?yán)走_(dá)探頭的典型測試裝置,使用矢量信號(hào)發(fā)生器(如R&S SMW200A)結(jié)合倍頻器(如R&S SMZ90)。用脈沖序列發(fā)生器軟件產(chǎn)生任意射頻環(huán)境,其中信號(hào)通過本地網(wǎng)絡(luò)或通過U盤傳輸?shù)绞噶啃盘?hào)發(fā)生器。將R&S SMW200A生成的12.6 GHz到13.5 GHz射頻信號(hào)乘以6。E-band喇叭天線可以連接到倍頻器的輸出,然后經(jīng)空中朝被測設(shè)備(Device Under Test, DUT)發(fā)射E-band信號(hào)。在該裝置中,矢量信號(hào)發(fā)生器使用的帶寬也放大了6倍。為了生成具有5GHz信號(hào)帶寬的雷達(dá)線性調(diào)頻脈沖,需要833.3MHz的基帶帶寬(833.3MHz×6 = 5GHz)。在下圖所示的裝置中,使用2 GHz基帶帶寬,可以實(shí)現(xiàn)高達(dá)12 GHz(2 GHz x 6 = 12 GHz)的射頻信號(hào)帶寬。
圖6:用于汽車?yán)走_(dá)探頭的干擾測試裝置
干擾信號(hào)的頻譜如下圖所示。可以觀察信號(hào)的頻譜以及上行線性調(diào)頻和下行線性調(diào)頻組成的LFMCW信號(hào)波形。所有線性調(diào)頻信號(hào)的參數(shù)都使用信號(hào)分析儀直接分析,例如使用配備R&S FSW-K60瞬態(tài)分析軟件的R&S FSW85。線性調(diào)頻信號(hào)長度為1 ms,信號(hào)頻率的線性度在幾kHz范圍內(nèi),這與汽車?yán)走_(dá)信號(hào)相當(dāng)。
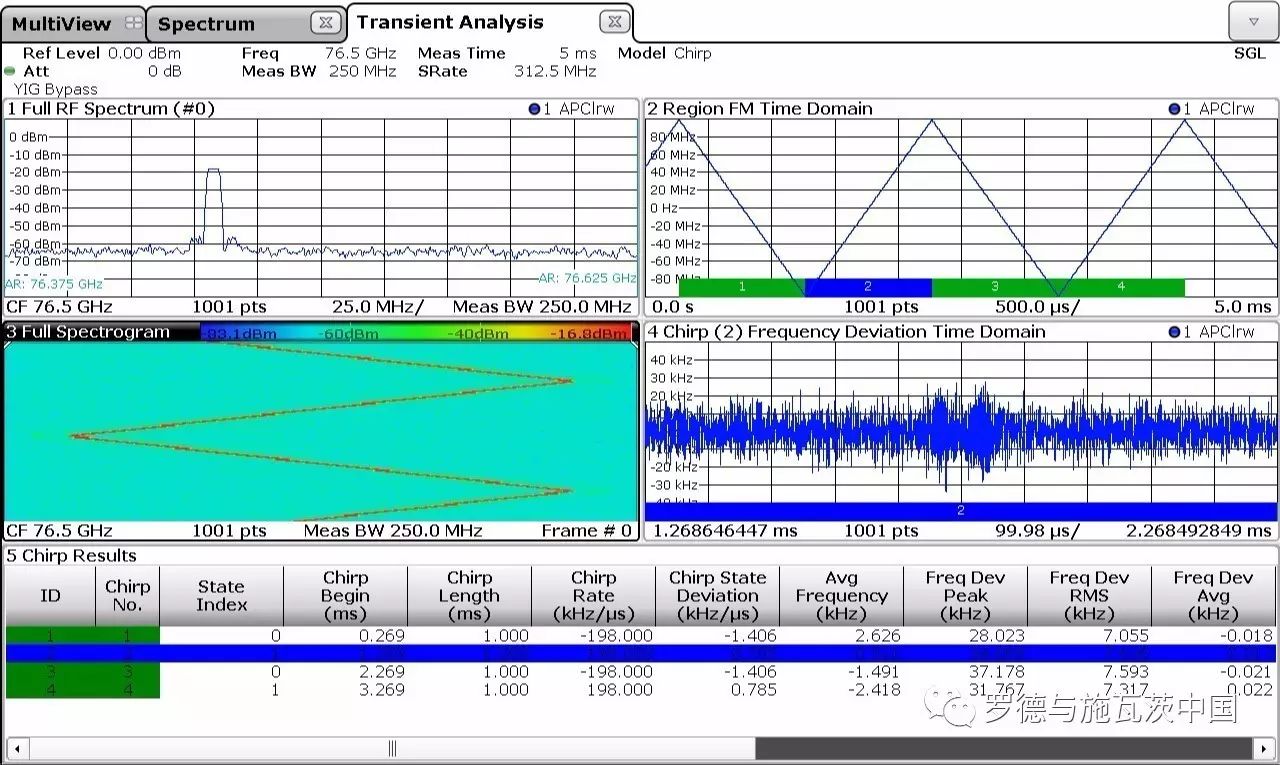
圖 7:用R&S SMW200A 結(jié)合R&S SMZ90倍頻器生成的雷達(dá)干擾信號(hào)
研究人員已經(jīng)研究在汽車?yán)走_(dá)中使用如OFDM這樣的通信信號(hào)[4],以及設(shè)計(jì)干擾抑制算法[6]。然而,在對價(jià)格敏感的探頭中實(shí)時(shí)處理這些超寬帶OFDM信號(hào)可能很復(fù)雜。這使得在不久的將來應(yīng)用OFDM信號(hào)前景不明。這也是為什么從毫米波范圍開始驗(yàn)證干擾抑制算法、波形和整個(gè)處理鏈?zhǔn)侨绱酥匾脑蛑弧?/p>
不僅是性價(jià)比,實(shí)時(shí)處理寬頻帶OFDM信號(hào)的挑戰(zhàn)性,在毫米波中生成幅度調(diào)制干擾信號(hào)也需要更復(fù)雜的裝置。圖8描述了一種方法,雙射頻通道矢量信號(hào)發(fā)生器分別生成中頻 (IF) 信號(hào)和本振 (LO) 信號(hào)。將本振信號(hào)頻率擴(kuò)大6倍,并將中頻信號(hào)搬移到76GHz至81GHz。具有內(nèi)部寬帶基帶源的矢量信號(hào)發(fā)生器,可在E-band中生成任意調(diào)制、帶寬高達(dá)2GHz的射頻信號(hào)。使用已校準(zhǔn)的內(nèi)部寬帶基帶硬件的矢量信號(hào)發(fā)生器(如R&S SMW200A)與使用多臺(tái)儀器的其他解決方案相比具有很大優(yōu)勢,因?yàn)樗恍枰?zhǔn),也不需要補(bǔ)償I / Q調(diào)制器的頻率響應(yīng)。

圖 8:使用混頻器的汽車?yán)走_(dá)探頭干擾測試裝置
測量結(jié)果
為了驗(yàn)證有附加雷達(dá)信號(hào)時(shí)產(chǎn)生的影響,使用最先進(jìn)的77GHz雷達(dá)探頭。這種探頭的優(yōu)點(diǎn)是在距離域中中頻和FFT原始數(shù)據(jù)的可用性,從而可以立即驗(yàn)證干擾信號(hào)對FFT頻譜的影響。如所解釋的,應(yīng)該看到基底噪聲的增加,這取決于有多少干擾信號(hào)功率被下變頻并落入接收機(jī)帶寬中。在這些測量中,探頭被配置為發(fā)射具有200 MHz信號(hào)帶寬的LFMCW信號(hào),如圖9所示,其中瞬態(tài)分析選件顯示了持續(xù)時(shí)間、信號(hào)帶寬、發(fā)射的線性調(diào)頻的線性度(頻率偏移在時(shí)域的變化)和射頻頻譜中的雜散干擾。
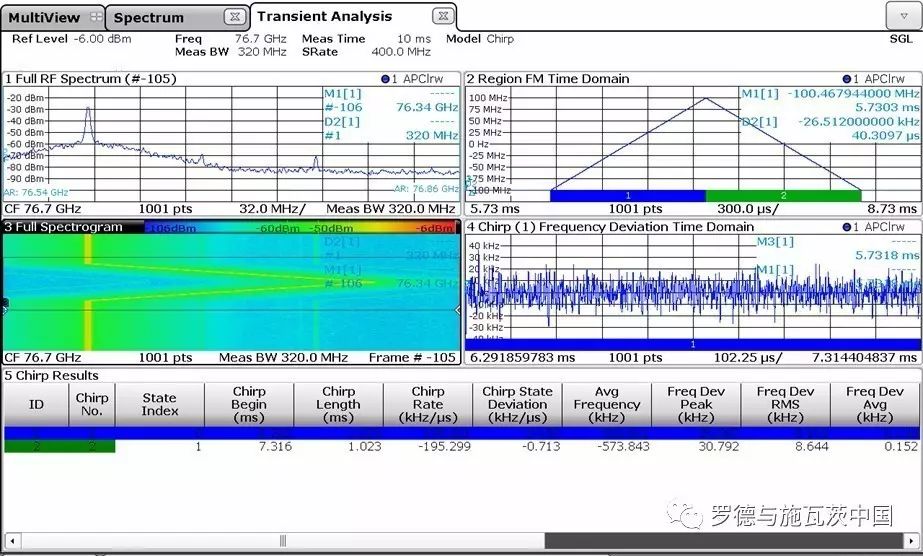
圖 9:用R&S FSW-K60瞬態(tài)分析選件分析雷達(dá)探頭
脈沖序列發(fā)生器軟件用于模擬波形,以及借助額外的干擾波形測試?yán)走_(dá)。采用實(shí)時(shí)頻譜儀的全息頻譜模式便可以檢驗(yàn)這兩個(gè)信號(hào)。圖10給出兩個(gè)射頻信號(hào),即由雷達(dá)探頭發(fā)射的線性調(diào)頻和由矢量信號(hào)發(fā)生器生成的干擾信號(hào)。當(dāng)雷達(dá)探頭發(fā)射上行線性調(diào)頻和下行線性調(diào)頻,接著是未調(diào)制的連續(xù)波信號(hào)時(shí),干擾信號(hào)僅發(fā)射上行線性調(diào)頻和下行線性調(diào)頻信號(hào)。干擾線性調(diào)頻信號(hào)的功率電平比發(fā)射的雷達(dá)信號(hào)小約5 dB,如全息頻譜中所示。
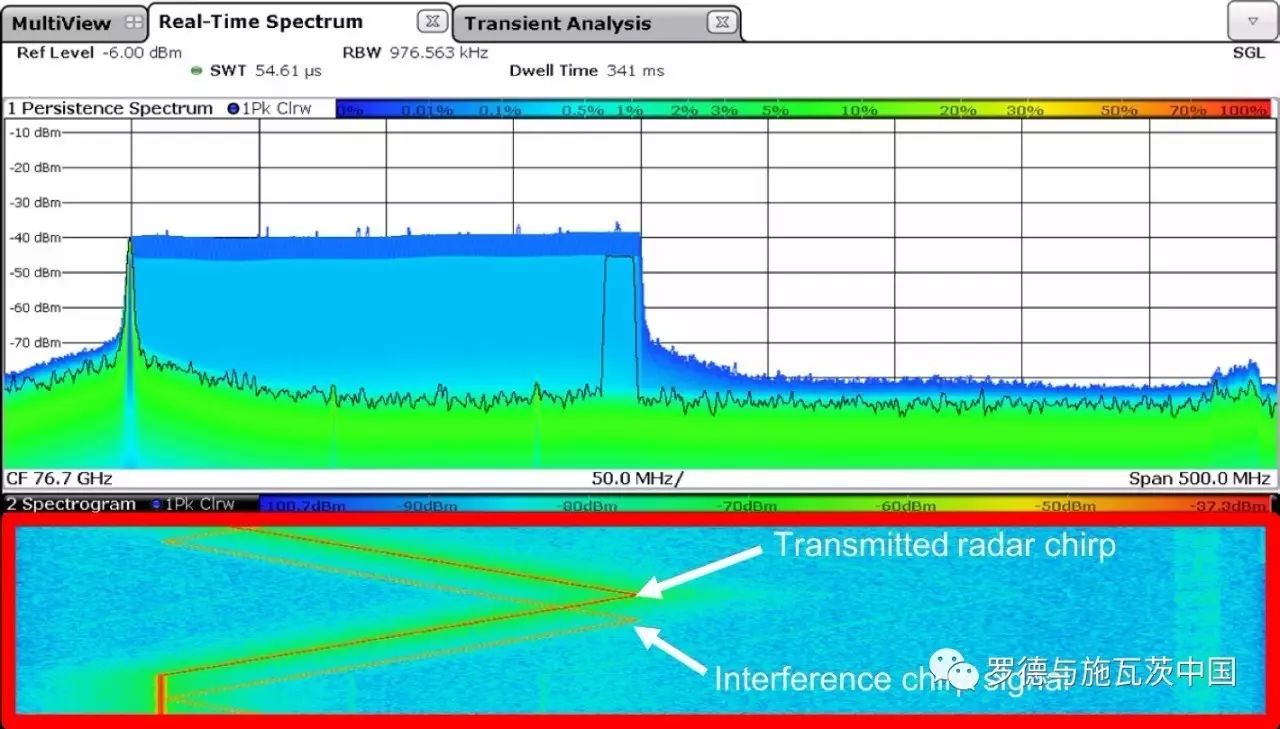
圖 10:實(shí)時(shí)頻譜中的結(jié)果: 有用信號(hào)(左側(cè)的單個(gè)線性調(diào)頻)和連續(xù)的線性調(diào)頻干擾
圖11給出了頻譜測量樣本,其中將有和沒有干擾信號(hào)情況下該范圍上的幅度電平繪出。當(dāng)測量進(jìn)入無干擾的自由空間時(shí),這個(gè)雷達(dá)探頭測量到功率電平在-115 dBm上下的頻譜,和在相鄰范圍內(nèi)的一些雷達(dá)回波信號(hào)。
當(dāng)存在干擾信號(hào)時(shí),取決于干擾信號(hào)自身情況,本底噪聲增加到約-102 dBm和-90 dBm。應(yīng)當(dāng)提及的是,該雷達(dá)探頭沒有采用任何干擾消除。此外,正如我們在上述測量中看到的,本底噪聲的增加明顯地取決于干擾信號(hào)電平和干擾波形本身。已經(jīng)證明,10dB到25dB的信噪比降低,可能在跟蹤期間非常容易地丟失目標(biāo),或者具有低雷達(dá)截面積(RCS)的目標(biāo),例如行人,不能被檢測到。
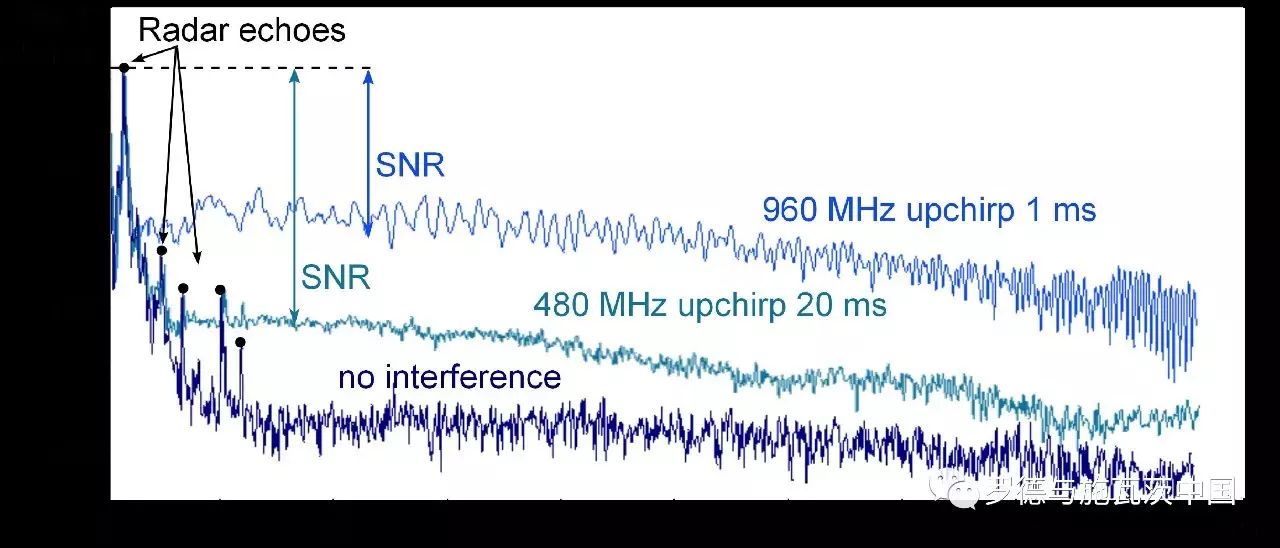
圖 11:被測雷達(dá)探頭測得的功率譜
總結(jié)
汽車?yán)走_(dá)支持追求額外的駕駛舒適性、安全性甚至自動(dòng)駕駛的趨勢。在街道上穿梭的汽車?yán)走_(dá)探頭數(shù)量正在迅速增加,并將在未來幾年進(jìn)一步增長。因此,在24 GHz、77 GHz和79 GHz頻帶中分配的頻譜要由不同類型的探頭和信號(hào)共享。作為保證安全性的關(guān)鍵元件,雷達(dá)探頭需要克服相互干擾,提供信號(hào)分集和干擾抑制技術(shù),以便測量、檢測、分辨和分類雷達(dá)回波信號(hào),即使在高密度占用的頻譜中。例如,現(xiàn)在有針對導(dǎo)航雷達(dá)的關(guān)于干擾測試和抑制的規(guī)范和標(biāo)準(zhǔn),但對于汽車?yán)走_(dá)還沒有要求。
為了滿足這些需求,本文介紹了最先進(jìn)的下一代汽車?yán)走_(dá)的理論背景和干擾對其造成的影響。對于驗(yàn)證任意射頻環(huán)境中的干擾抑制技術(shù),提出了測試和測量的可能性。使用最先進(jìn)的商用77 GHz雷達(dá)探頭驗(yàn)證了干擾的影響。這些測試裝置應(yīng)該可以幫助研究人員和開發(fā)人員,按照技術(shù)規(guī)范,即使在惡劣的射頻環(huán)境下也能確保他們雷達(dá)的功能。
-
發(fā)生器
+關(guān)注
關(guān)注
4文章
1405瀏覽量
62829 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3119瀏覽量
120063 -
調(diào)制器
+關(guān)注
關(guān)注
3文章
901瀏覽量
46546
發(fā)布評(píng)論請先 登錄

激光雷達(dá)技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用

溫度探頭的應(yīng)用案例分析
案例分享 | 光隔離探頭在新能源汽車電機(jī)控制器的雙脈沖測試應(yīng)用實(shí)例
示波器探頭的相關(guān)問答
汽車雷達(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場景
激光雷達(dá)技術(shù)的發(fā)展趨勢
示波器高壓探頭和低壓探頭區(qū)別
定華雷達(dá)儀表學(xué)堂:雷達(dá)料位計(jì)如何在強(qiáng)粉塵環(huán)境里測量
差分探頭和普通探頭的差異
示波器探頭分類及原理詳細(xì)介紹
使用近場探頭進(jìn)行EMC頻譜分析的方法與技巧
光隔離探頭與普通電壓探頭:差異與應(yīng)用

高壓探頭1000:1分壓的原理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論