") 關(guān)于MPS助力智能娛樂機器人的性能分析和介紹
關(guān)于MPS助力智能娛樂機器人的性能分析和介紹
機器人列隊那顛覆性而囂張的舞姿相信給全國各地的觀眾留下深刻的印象。
本次登陸春晚舞臺進行舞蹈表演的機器人的核心部件是伺服舵機系統(tǒng),這款產(chǎn)品據(jù)說它擁有16個舵機,所以模仿起人類的骨骼肢體動作來活靈活現(xiàn)。
臥槽,這是要屌炸天的節(jié)奏么?看這銷魂的踢腿,要不要來會兒瑜伽?
產(chǎn)品每一個連接處都需要一個舵機(舵機是每個關(guān)節(jié)部分的伺服電機系統(tǒng)),舵機電機是一個微型的伺服控制系統(tǒng),多是用于航模上,可以采用無刷或者有刷直流電機作為驅(qū)動電機。
如何給這款盛氣凌人的機器人提供MPS的解決方案,讓我們分析一下,如下圖。
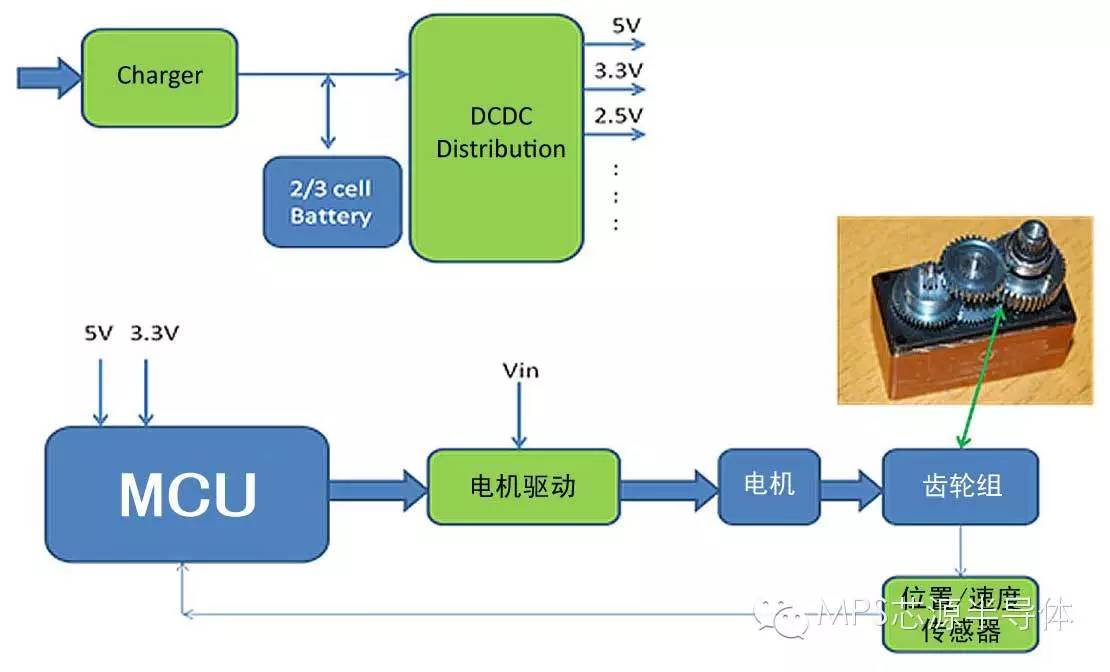
舵機的工作原理:
控制電路MCU發(fā)出控制脈沖,通過電機驅(qū)動芯片驅(qū)動電機,齒輪組將電機的轉(zhuǎn)子的速度成大倍數(shù)縮小,并將電機的輸出扭矩放大相應倍數(shù),然后輸出,位置/速度傳感器測量舵機軸轉(zhuǎn)動角度并反饋給控制電路,來控制舵機轉(zhuǎn)動到目標角度或保持在目標角度。
上圖中的綠色框圖的部分是我們MPS的菜,其中包括電機驅(qū)動,位置傳感器,充電器,DC/DC,音頻放大器。
1 電機驅(qū)動 器件編號: MP6515
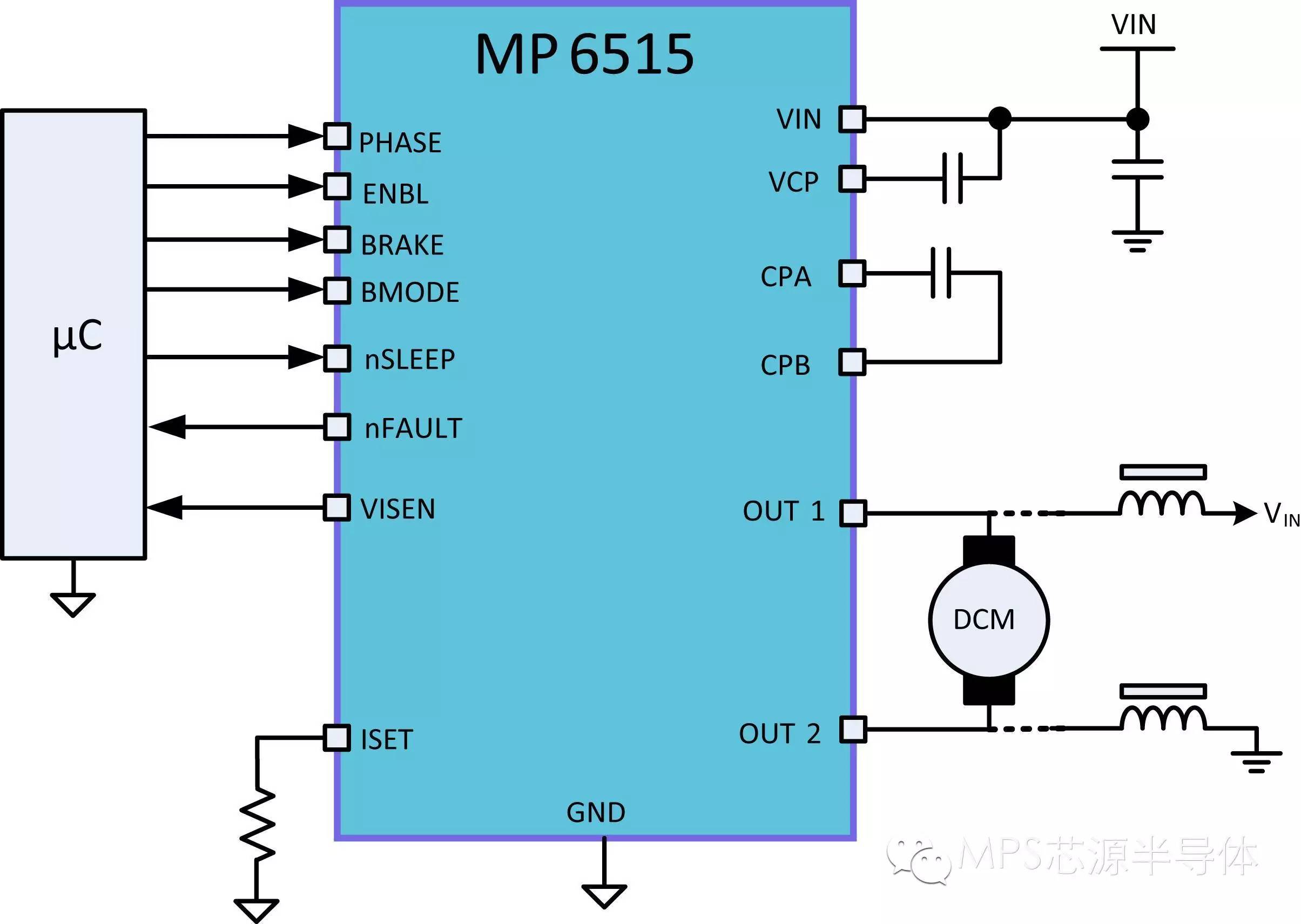
MP6515特性:
有刷直流電機驅(qū)動
5.4V至35V的電壓輸入范圍
最大2.8A的輸出電流
內(nèi)部集成全橋
逐周期的電流調(diào)節(jié)方式
不需要外接shunt電阻,內(nèi)部集成電流檢測電路
低Rdson(HS:200mΩ;LS:200mΩ)
過流保護
輸入過壓保護
過熱保護
輸入欠壓鎖定
故障指示輸出功能
封裝TSSOP16
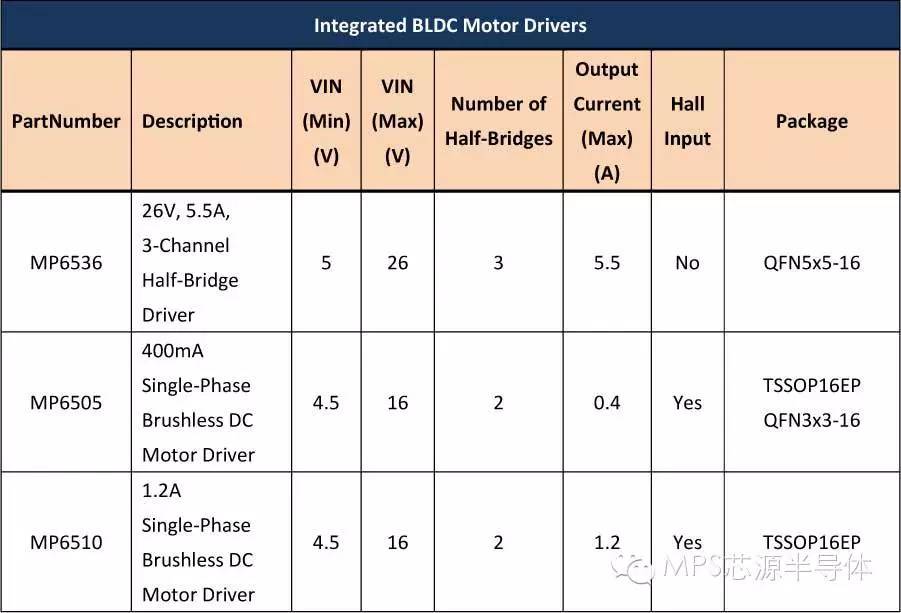
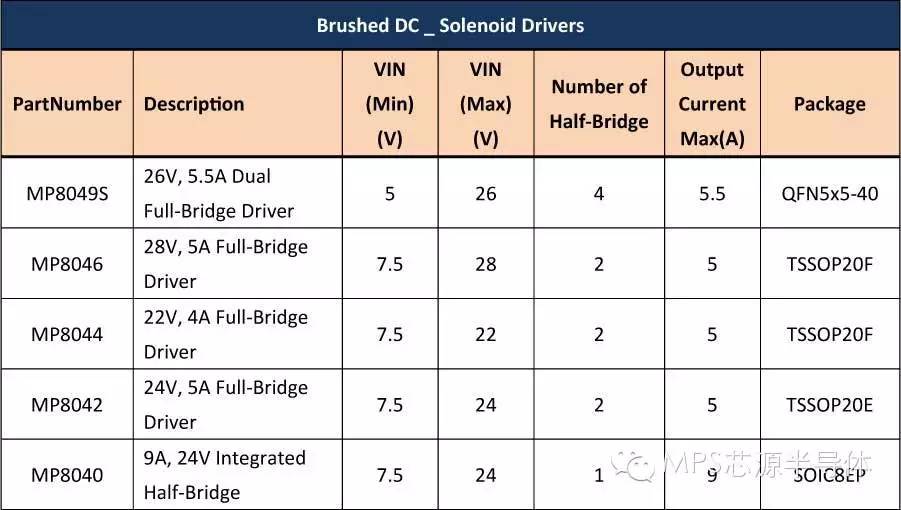
MPS還提供其他不同規(guī)格電機驅(qū)動產(chǎn)品供客戶選擇:
2 位置傳感器
傳統(tǒng)的電位器測量舵機轉(zhuǎn)動角度,具有可靠性差,壽命短,功耗大,精度差等缺點。
MPS提供新的解決方案。
器件編號: MA300
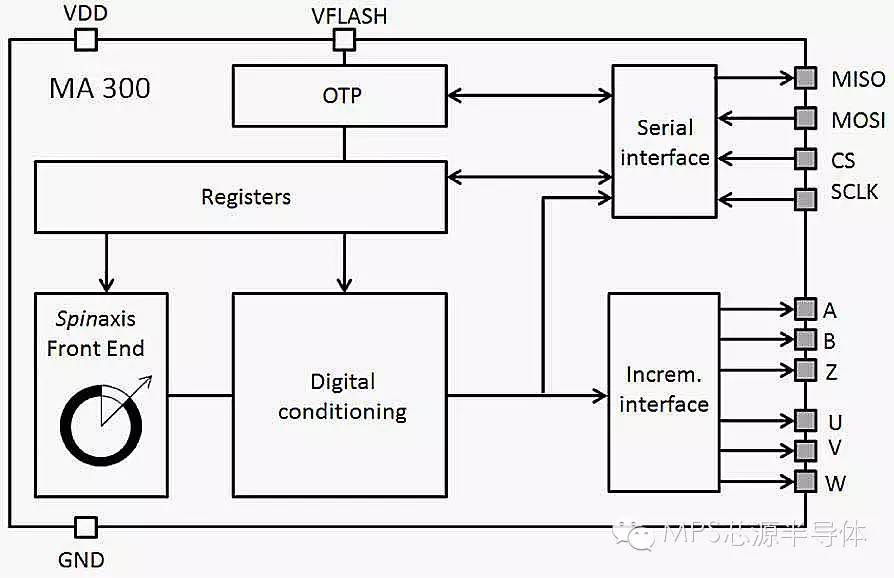
MA300特性:
3相直流無刷電機角度傳感器
兼容側(cè)軸和垂直軸安裝
500KHZ的采樣頻率
3us的超低延遲
中等功率消耗7mA
小封裝 QFN-16 3x3
SPI接口
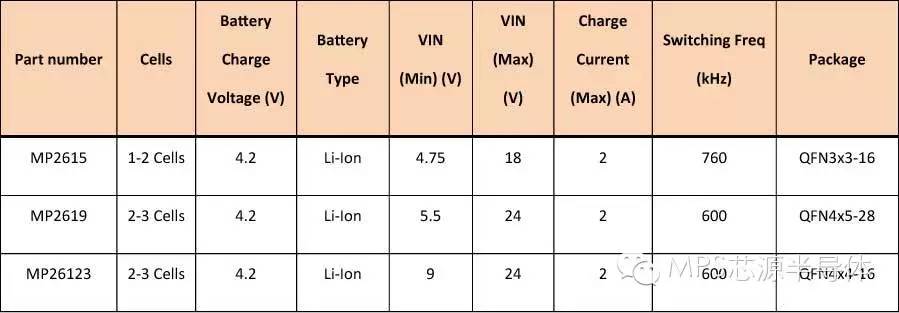
3充電器Charger
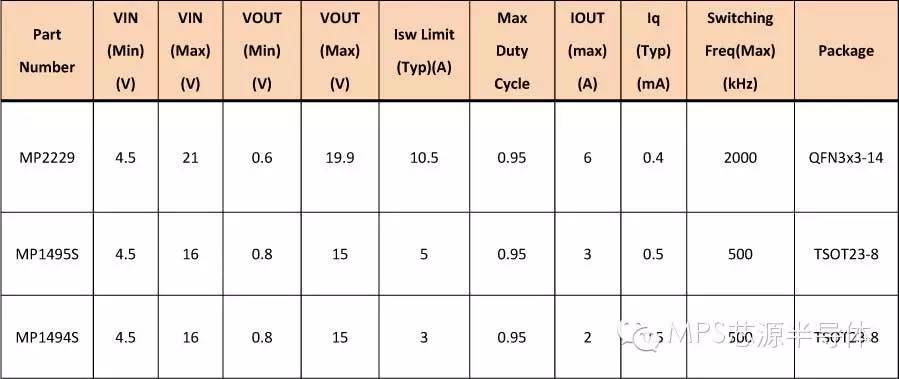
4DCDC降壓變換器
為系統(tǒng)內(nèi)部供電,MPS提供多種DCDC降壓轉(zhuǎn)換芯片,使系統(tǒng)內(nèi)部得到5V/3.3V/2.5V/1.2V等電平,滿足高效率,小封裝,低靜態(tài)電流,低紋波等要求。
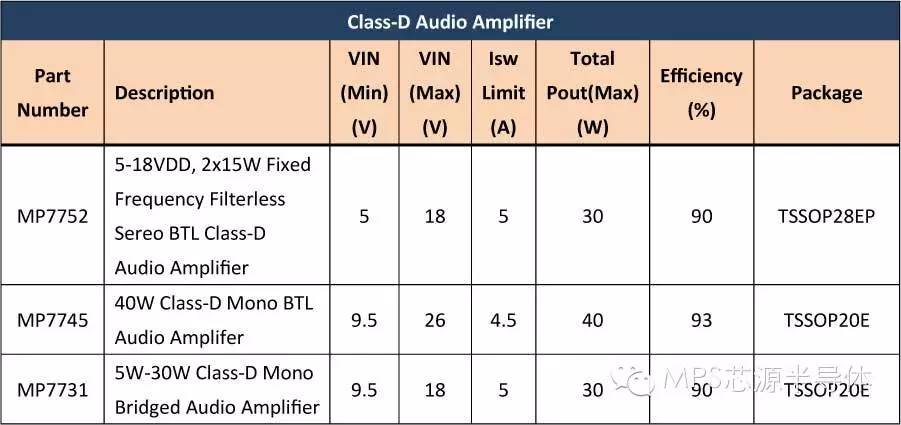
5音頻放大器IC
當然,目前的機器人還應具有人機對話溝通的功能,如下表是MPS所提供的音頻放大器IC。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52746瀏覽量
765001 -
放大器
+關(guān)注
關(guān)注
145文章
14121瀏覽量
216626 -
機器人
+關(guān)注
關(guān)注
213文章
29577瀏覽量
212023
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論