 關于GPT12正交編碼器輸入譯碼開發案例的分析和介紹
關于GPT12正交編碼器輸入譯碼開發案例的分析和介紹
案例內容概覽
1.1 功能開發需求
1.3 GPT12解碼原理
1.4 MCU引腳資源分配
1.5 GPT12時鐘源
1.6 GPT12的Port配置
1.7 GPT12的增量接口配置
1.8 代碼實現
1.9 問題與解決
1.10 附錄-增量編碼輸入示波器波形
(1)正轉
(2)正轉清零
(3)反轉
1.1 功能開發需求
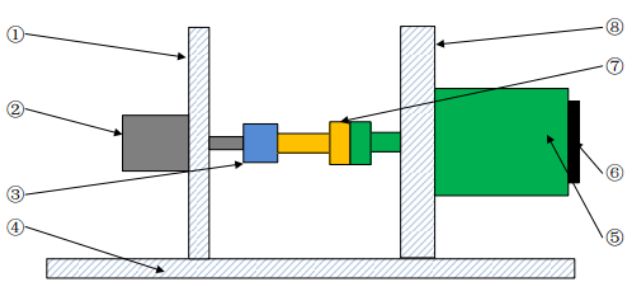
在某款汽車電子產品的電機轉子位置RPS傳感器的精度性能評價測試中,需采用高精度編碼器對電機轉子位置進行同軸同步高精度采集,以實現對標電機端RPS傳感器是否合格。此圖為性能評價測試工裝示意圖。
工裝圖注說明:
①編碼器工裝;②高精度編碼器;③剛性聯軸器;④工裝底座面板;
⑤電機本體;⑥電機位置RPS傳感器;⑦爪型聯軸器;⑧電機工裝側板。
開發需求:
電機的⑥處位置&角速度傳感器的精度需要根據同軸的外部②處的正交編碼器進行校準,因此我們需要將ECU捕獲到②和⑥的信號進行對比一致性,開發MCU程序實現:由GPT12直接捕獲正交編碼器A、B、Z三路信號直接結算的模塊和功能。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2564文章
52668瀏覽量
764333 -
電機
+關注
關注
143文章
9263瀏覽量
148532 -
正交編碼器
+關注
關注
0文章
16瀏覽量
10741
發布評論請先 登錄
相關推薦
熱點推薦
定時器是不是有編碼器輸入功能?
你好,我想請教一下定時器是不是有編碼器輸入功能,是高級定時器和通用定時器都有嗎,還是不一定,具體要看手冊,能幫我看一下STM32G473有幾
發表于 03-11 07:07
編碼器常見的故障問題及案例分析
編碼器作為自動化控制系統中的重要組件,負責將機械位移轉換為電信號,以供上位機、PLC或驅動器等設備讀取和處理。然而,在使用過程中,編碼器可能會遇到多種故障。以下是對編碼器常見故障及案例
DISCOAA編碼器性質特點
。它們廣泛應用于各種工業、機械和自動化系統中。根據工作原理和測量類型,編碼器可以分為多種類型,如絕對式編碼器和增量式編碼器,以及電磁式、光電式、電感式、電容式、激光式等不同工作原理的編碼器
DISCOAA編碼器類型功能
DISCOAA編碼器可能包括絕對編碼器和增量編碼器兩種類型,其主要功能是將輸入信號進行分析和處理,并將其轉換為數字信號 ?。
編碼器與譯碼器:功能、原理及應用解析
在數字電子技術的浩瀚星空中,編碼器和譯碼器如同兩顆璀璨的星辰,它們各自扮演著至關重要的角色,共同編織著信息傳輸與處理的精密網絡。今天,就讓我們一同深入探索這兩者的奧秘,揭開它們如何在現代電子系統中發
拉線編碼器關鍵參數詳解
在工業自動化和精密測量領域,拉線編碼器以其高精度、長壽命和靈活的安裝方式,成為了眾多應用場合的首選。然而,面對市場上琳瑯滿目的拉線編碼器產品,如何挑選一款符合自己需求的編碼器,成為了許多工程師和采購人員面臨的挑戰。本文將詳細
增量編碼器與絕對值編碼器的區別
增量編碼器與絕對值編碼器的區別:增量編碼器與絕對值編碼器在精度特點對比
增量編碼器的精度取決于脈沖的數量和測量的細分程度,通常情況下,其精度

二進制編碼器與絕對編碼器的區別
編碼器是工業自動化和機器人技術中不可或缺的組件,用于將機械位置或運動轉換為電信號。二進制編碼器和絕對編碼器是兩種常見的編碼器類型,它們各自有著獨特的特點和應用場景。 二進制
二進制編碼器應用場景 二進制編碼器與模擬編碼器比較
限性。 二進制編碼器概述 二進制編碼器是一種將輸入信號轉換為二進制代碼的設備。它通常用于數字系統中,將模擬信號或非二進制信號轉換為二進制形式,以便數字電路可以處理。二進制編碼器的主要特
二進制編碼器工作原理 如何選擇二進制編碼器
二進制編碼器是一種數字電路,它將輸入的二進制代碼轉換為對應的輸出信號。在數字系統中,編碼器用于將數據從一種形式轉換為另一種形式,以便于處理和傳輸。 二進制編碼器工作原理
變頻器與編碼器的連接方式
對電機位置的精確控制。連接編碼器信號線:根據編碼器的信號輸出方式,將其信號線連接到變頻器的相應端子上。對于增量式編碼器,需要將A相、B相和Z相信號線分別連接到變頻

磁電編碼器和光電編碼器的區別
的傳感器。在工業自動化、機器人、航空航天等領域,編碼器發揮著至關重要的作用。根據工作原理的不同,編碼器可以分為磁電編碼器和光電編碼器兩大類。
自編碼器的原理和類型
自編碼器(Autoencoder, AE)是一種無監督學習的神經網絡模型,它通過編碼器和解碼器的組合,實現了對輸入數據的壓縮和重構。自編碼器
帶Arduino的旋轉編碼器設計 旋轉編碼器的工作原理和特點
技術、精密測量、自動化設備以及計算機輸入設備等領域。作為一種集光機電技術于一體的速度位移傳感器,旋轉編碼器具有高精度、高分辨率、長壽命和穩定可靠等優點。





 工商網監
工商網監
評論