") 對于智能駕駛的解讀和應(yīng)用
對于智能駕駛的解讀和應(yīng)用

無人駕駛如同高爾球比賽一般
在高爾夫球運(yùn)動比賽中,隨著比賽各個(gè)階段的不同,球桿使用也需要根據(jù)比賽場地變化進(jìn)行更換;發(fā)球桿,沙坑桿,或者果嶺推桿等不同的球桿根據(jù)特定的環(huán)境幫助比賽者提供最佳的比賽表現(xiàn)。
一輛無人駕駛汽車需要用不同的處理器來進(jìn)行“驅(qū)動”,如同選擇使用不同球桿來打完高爾夫球場上的18個(gè)球洞一樣。除此之外,選手們在高爾夫球比賽中同樣需要發(fā)揮更多智慧和創(chuàng)造力,無人駕駛汽車上不同類型的傳感器可以生成不同類型的數(shù)據(jù):攝像頭生成像素,激光雷達(dá)生成點(diǎn)云,雷達(dá)生成模擬波形等等。不同傳感器接受的數(shù)據(jù)類型需要不同的處理方式,人們需要選擇適合每種數(shù)據(jù)類型的專用工具來開發(fā)無人汽車的大腦,而不是用一個(gè)游戲處理器應(yīng)對一切任務(wù)。
人工智能支撐無人駕駛汽車
智能駕駛領(lǐng)域中有一種說法:無人駕駛汽車中的人工智能所扮演的角色就是“計(jì)算機(jī)視覺”,一種特定類型的計(jì)算元素能夠用于無人駕駛汽車中的所有人工智能。其實(shí),這句描述并沒有完整表達(dá)人工智能的應(yīng)用在無人駕駛技術(shù)上所面臨的挑戰(zhàn),人工智能的特征遠(yuǎn)遠(yuǎn)不只是關(guān)系計(jì)算機(jī)視覺的處理,無人汽車駕駛技術(shù)中的人工智能應(yīng)用需要從自然語言處理到個(gè)性化處理,再到?jīng)Q策層面的整體需求去考慮。
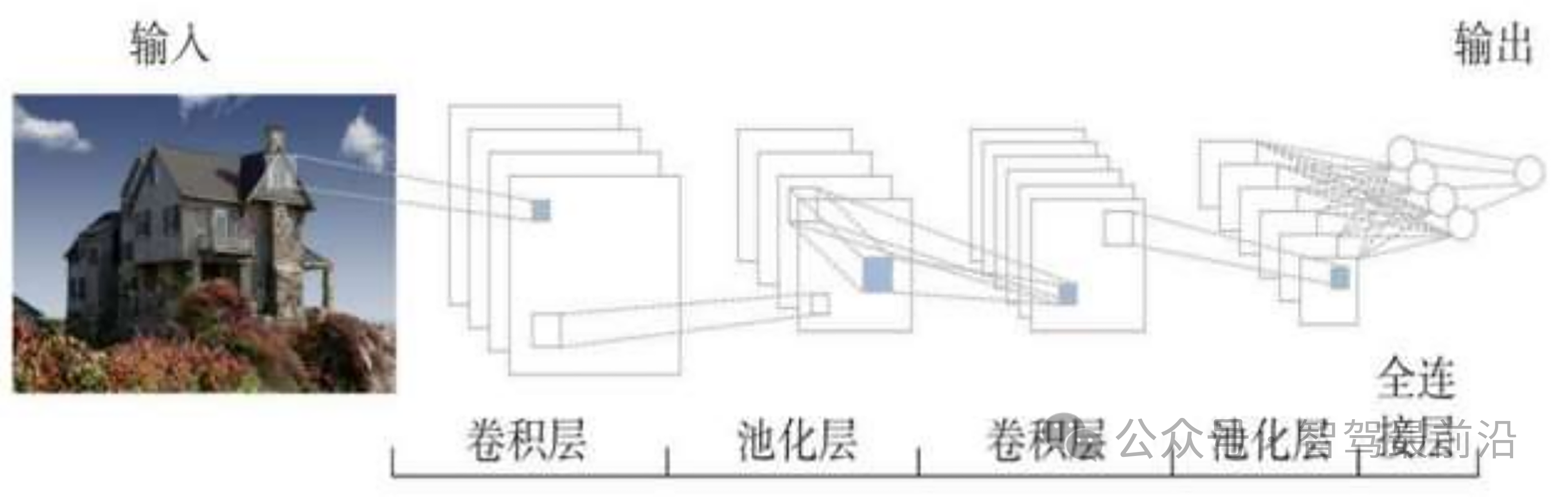
從人工智能應(yīng)用中的感知、認(rèn)知、行為特征方面看,感知部分難度最大,技術(shù)應(yīng)用也是最多。感知技術(shù)依賴于傳感器,比如攝像頭,由于其成本低,在產(chǎn)業(yè)界倍受青睞。以色列公司Mobileye在交通圖像識別領(lǐng)域做得非常好,它通過一個(gè)攝像頭可以完成交通標(biāo)線識別、交通信號燈識別、行人檢測,甚至可以區(qū)別前方是自行車、汽車還是卡車。人工智能技術(shù)在圖像識別領(lǐng)域的成功應(yīng)用莫過于深度學(xué)習(xí),近幾年研究人員通過卷積神經(jīng)網(wǎng)絡(luò)和其它深度學(xué)習(xí)模型對圖像樣本進(jìn)行訓(xùn)練,大大提高了識別準(zhǔn)確率。認(rèn)知與控制方面,主要使用人工智能領(lǐng)域中的傳統(tǒng)機(jī)器學(xué)習(xí)技術(shù),通過學(xué)習(xí)人類駕駛員的駕駛行為建立駕駛員模型,學(xué)習(xí)人的方式駕駛汽車。
英特爾中國研究院院長宋繼強(qiáng)認(rèn)為,人工智能包括深度學(xué)習(xí),對無人駕駛技術(shù)而言至關(guān)重要,但仍需其他層面相應(yīng)的技術(shù)予以配合。目前,英特爾已經(jīng)和寶馬、Mobileye 等汽車企業(yè)進(jìn)行深度合作,提供諸如車內(nèi)計(jì)算、云和機(jī)器學(xué)習(xí)的解決方案,甚至還包括高帶寬、低延遲的連接系統(tǒng)、強(qiáng)大的內(nèi)存和 FPGA技術(shù)、人機(jī)接口,以及安全技術(shù)等。融入了這些技術(shù)的寶馬下一代無人駕駛汽車,能夠更為完整的體現(xiàn)出未來智能汽車的發(fā)展趨勢。
-
英特爾
+關(guān)注
關(guān)注
61文章
10188瀏覽量
174268 -
人工智能
+關(guān)注
關(guān)注
1805文章
48898瀏覽量
247823 -
智能駕駛
+關(guān)注
關(guān)注
4文章
2794瀏覽量
49827
發(fā)布評論請先 登錄
從實(shí)驗(yàn)室到開放道路:自動駕駛算法的“攻防博弈”#V2X #智能駕駛 #自動駕駛 #VTHiL

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
從特斯拉看智能駕駛未來發(fā)展





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論