 mBot教育機器人套件演示
mBot教育機器人套件演示

mBot 是一款教育機器人套件,適合初學者獲得有關圖形編程,電子設備和機器人的實踐經驗。它是機器人學習的一體化解決方案,專為STEM教育而設計。
第1步:部分列表
機械零件
1 *金屬底板
2 * TT減速電機
2 *輪
2 *輪胎
1 *塑料萬向輪
1 *魔術膠帶20 * 30mm
6 *黃銅螺柱M4 * 25
14 *內六角螺釘M4 * 8
6 *螺母M4
4 * Nut M3
4 * Philip‘s Head Screw M3 * 25
2 *自攻螺釘M2.2 * 9.5
步驟2:電子模塊
1 *基于Arduino的控制板
1 * Me超聲波傳感器V3.0
1 * Me Line Follower V2.2
1 * Bluetooth
1 *電池座(4) AA
4 * RJ25電纜
1 * USB A-Male到B-Male電纜
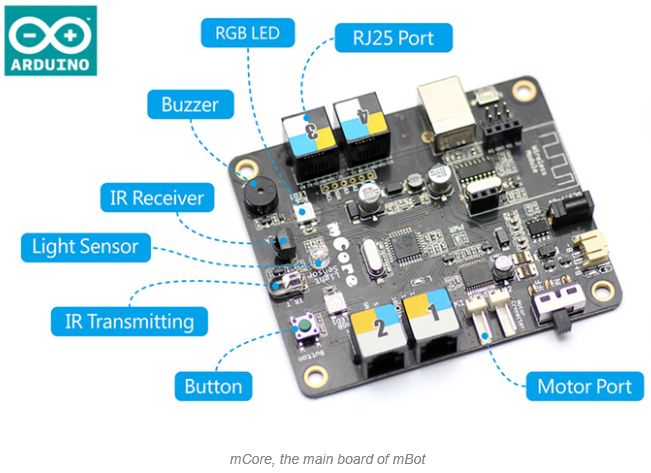
mCore主控制板
功能:
DC Power Jack
USB B型連接器
RJ25端口
RGB LED
IR接收器
紅外發射器
電機端口
光傳感器
步驟3:裝配
首先使用螺絲將電機固定在金屬底板上。然后在輪子上添加輪胎,并將兩個輪子固定在金屬底板的左右兩側。
然后在線跟隨器模塊上添加塑料萬向輪并將其固定在金屬底座上底板使用螺釘。
步驟4:
然后將超聲波傳感器模塊固定在金屬底板的微笑表面上,并添加四個黃銅螺柱,以便在金屬底板上方支撐mCore板。
之后,使用魔術膠帶連接電池支架和金屬底板。
步驟5:
最后,修復上面的mCore板四個黃銅螺柱然后用RJ25電纜連接端子2和超聲波傳感器模塊,另一個RJ25電纜用于連接端子3和線路跟隨器模塊。 (注意:藍牙模塊和Arduino基本控制板已經固定在mCore中了。)
組裝完成10分鐘后,完成一個完整的機器人車 - mBot。
步驟6:使用MBlock圖形編程軟件學習程序
mBlock是由MIT Media Lab開發的Scratch 2.0的免費修改版本。添加了一些基于原始Scratch的硬件相關模塊,mBlock使用戶可以輕松讀取傳感器,控制電機甚至整個機器人。
-
機器人
+關注
關注
213文章
29718瀏覽量
212759
發布評論請先 登錄
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
大象機器人攜手地瓜機器人打造全國產輕量級教育協作機械臂新標桿

大象機器人推出myCobot 280 RDK X5,攜手地瓜機器人共建智能教育機

機器人開發套件 Kria KR260
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
ST NPI 專區 | 新開發套件 【STEVAL-ROBKIT1】 機器人應用評估平臺






 工商網監
工商網監
評論