 PJRC Teensy 3.5 開發板與BLDC霍爾傳感器實現位置編碼
PJRC Teensy 3.5 開發板與BLDC霍爾傳感器實現位置編碼

概述
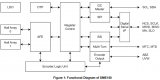
BLDC 中的三個霍爾效應傳感器輸出送入微控制器后,信號便可以像三通道編碼器那樣進行處理。輸出數據可以顯示出來,或者用來確定脈沖計數、旋轉方向和平均每分鐘轉數 (RPM)。RPM 求取的是平均值,以便使顯示的值平滑過渡。
PJRC Teensy 3.5 開發板
SparkFun 的 PJRC Teensy 3.5 開發板 (1568-1464-ND) 配有焊入式針座,并可產生足夠多的數字中斷,用于處理霍爾傳感器的三個信號輸入。由于具有大量的額外 I/O 通道,Teensy 3.5 有能力執行很多其他任務,并且可使用內置 SD 卡進行數據記錄。
使用試驗板測試傳感器輸出和 PJRC Teensy 3.5
使用一塊試驗板(438-1045-ND 或類似產品),將 Teensy 3.5 的 USB 連接器放置在右側,并將上方針座引腳插入分隔槽上面的第一行試驗板插孔中(圖 2)。這樣可以留出空間,以便將傳感器輸出連接到 Teensy I/O。
使用實芯跳線 (BKWK-3-ND) 進行試驗板上的所有連線。將 5 V、1 A 電源的正極 (+) 引線連接到試驗板的上方或下方正電源軌上,隨后將負極 (-) 電源引線連接到上方或下方負電源軌上。將霍爾傳感器連接器的正極(紅色)和負極(黑色)引線,分別連接到試驗板的正、負電源軌上,然后將連接器的三根傳感器引線,以任意順序連接到 Teensy 3.5 的第 2、3 和 4 號引腳。
傳感器輸出為有源低電平,這是指當觸發時,輸出連接到負電源軌;而沒有觸發時,需要將傳感器輸出上拉至正電源軌,以創建兩個定義的邏輯狀態。在試驗板中插入三個 4 KΩ – 8 KΩ 的電阻器,即可用作傳感器輸出的上拉電阻器(圖 2)。
使用 Micro B 轉標準 A 型 USB 電纜,將 Teensy 3.5 連接到計算機。
軟件
為便于編程,Teensy 3.5 與 Arduino 集成開發環境 (IDE) 相兼容。IDE 和 Teensyduino 插件可在線獲取。
下文中提供的編程示例代碼使用了三個硬件中斷,來監控霍爾傳感器輸出的任何變化(上升沿和下降沿)。一旦發生中斷,將讀取 Teensy 3.5 的歷時時鐘和三個輸入引腳中的兩個引腳。之后將比較傳感器的值,以確定旋轉方向,然后再進行其他計算來確定脈沖計數和平均 RPM。中斷之間的時間間隔計算方法是:比較當前時鐘值與上一次中斷中存儲的時鐘值。
在 void loop 中,有四個值可用于串行打印。可以通過注釋或取消注釋代碼行,來禁用或激活串行打印功能,然后將代碼下載到 Teensy 并啟動串行監視器,以查看實時數據。旋轉 BLDC 電機,在打印監視器中觀察值的變化情況。
總結
BLDC 霍爾傳感器現在配置為三通道、低分辨率編碼器,能夠提供精準數據,幫助進行導航和電機輪位置檢測,而不會妨礙其主要的電機控制功能。一些 BLDC 控制器只使用反電動勢來確定線圈和磁鐵的位置,使霍爾傳感器輸出僅用于導航和位置檢測。但無論如何,傳感器對于用戶而言,不只具有電機控制功能,還有其他更多價值。
-
微控制器
+關注
關注
48文章
7953瀏覽量
155099 -
霍爾傳感器
+關注
關注
28文章
761瀏覽量
64464
發布評論請先 登錄
BLDC無位置傳感器控制的關鍵技術問題剖析(可下載)
轉子位置傳感器之霍爾磁敏傳感器介紹(可下載)

高效學習 霍爾傳感器
霍爾傳感器的輸出電壓大小由誰決定
使用霍爾效應傳感器針對篡改和移動終點位置檢測實現限制檢測

3D霍爾效應位置傳感器的基本原理及其應用案例





 工商網監
工商網監
評論