") 如何制作簡單的射頻遙控車
如何制作簡單的射頻遙控車
步驟1`2:準備
步驟3:所需的材料
原型板x2
HT12E編碼器
HT12d解碼器
L293D電動機驅動器
7805降壓調節(jié)器
散熱器7805
470uf電容器x 2
0.1ufcapacitor x 2
1M電阻
1K電阻
50k電阻
12v直流電動機(RPM取決于您的選擇,我使用了100 RPM)
12v電源
dc電源插孔x 2(可選)
步驟4:電源
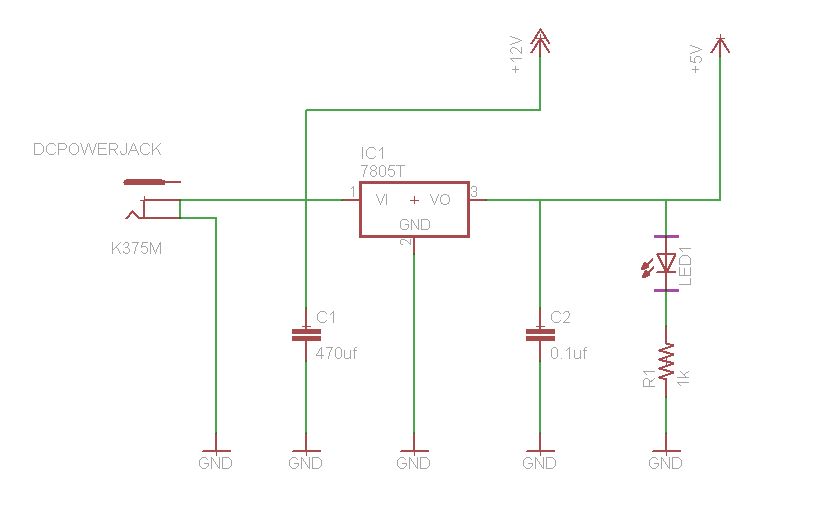
兩個rf發(fā)射器接收器電路需要單獨的電源
接收器電路需要使用12v電源供電,發(fā)送器電路可以使用9v電池供電
首先,我們將從電源電路開始。電源是最簡單的一種。電源電路由
IC 7805組成,該集成電路將12v電源調節(jié)至5v(如果無法獲得12v電源,則可以使用9v電源)
0.1uf和470uf電容器
注意:使用散熱器7805,因為我們將7v(12-5)降了這么多會產生熱量燃燒調節(jié)器,因此建議使用散熱器
7805 IC的引腳說明
引腳1-輸入電壓(5v-18v)[V in]
Pin 2-接地[gnd]
Pin 3-調節(jié)輸出(4.8v-5.2v]
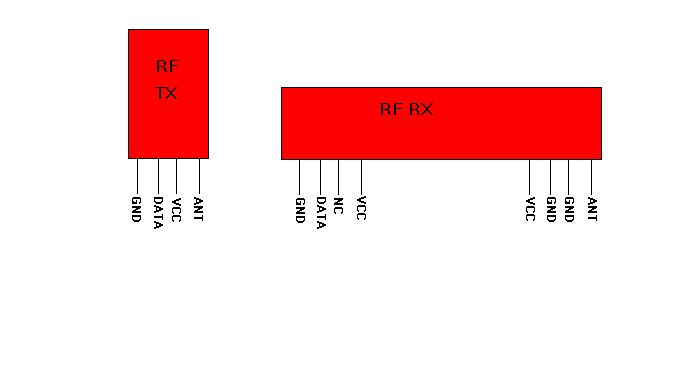
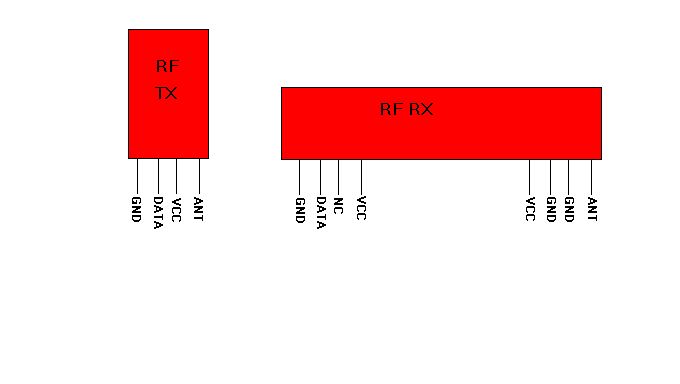
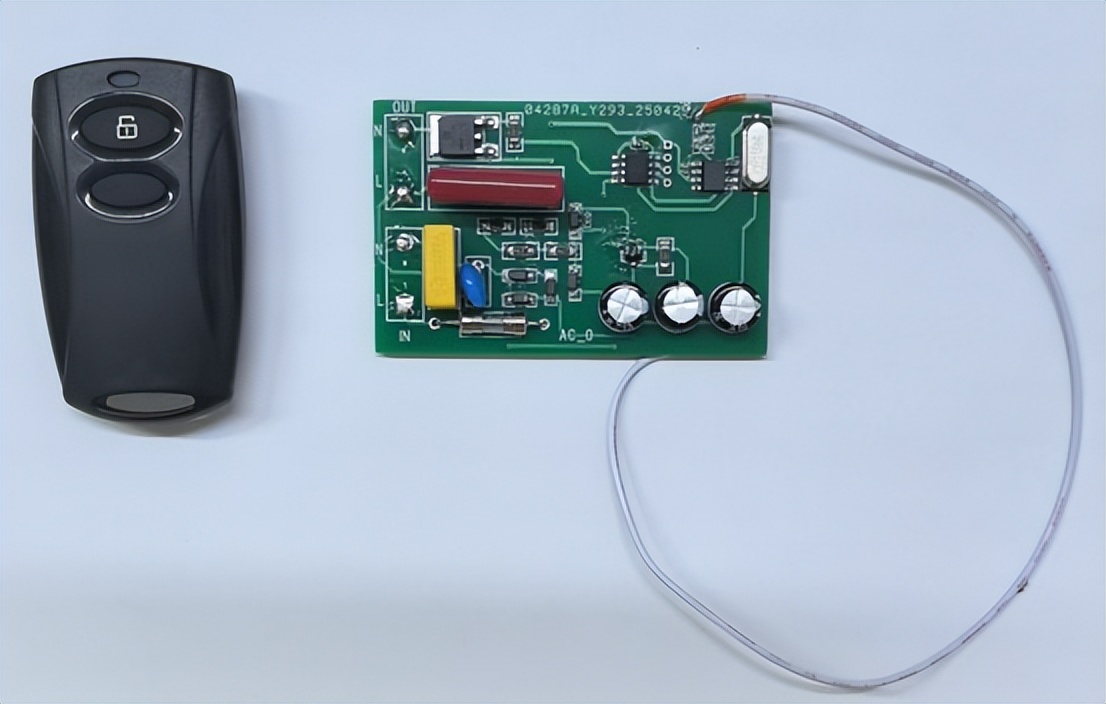
第5步:什么是RF模塊???
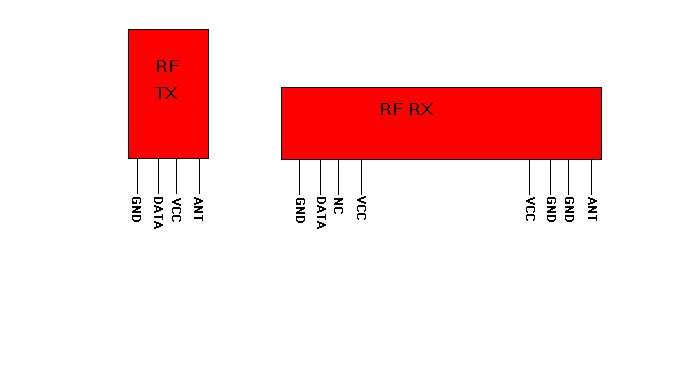


此RF模塊由射頻發(fā)射器和射頻接收器組成,發(fā)射器/接收器(Tx/Rx)對的工作頻率為434 MHz,射頻發(fā)射器接收串行數(shù)據(jù),并通過連接在引腳4上的天線通過射頻無線傳輸。發(fā)生的速率為1Kbps-10Kbps。由與發(fā)射器頻率相同的頻率的RF接收器接收。
RF模塊與一對編碼器和解碼器一起使用。編碼器用于對并行數(shù)據(jù)進行編碼,以用于傳輸饋送,同時接收器由解碼器解碼。 HT12E-HT12D
PIN描述
RF發(fā)送器
引腳1-接地[GND]
引腳2-串行數(shù)據(jù)輸入引腳[DATA]
引腳3-電源供應; 5V [Vcc]
引腳4-天線輸出引腳[ANT]
RF接收器
引腳1-接地[GND]
引腳2-串行數(shù)據(jù)輸出引腳[DATA]
引腳3-線性輸出引腳(未連接)[NC]
引腳4- 電源; 5v [Vcc]
Pin 5 -電源; 5v [Vcc]
Pin 6 -接地[GND]
Pin 7 -接地[GND]
Pin 8 -天線輸入引腳[ANT]
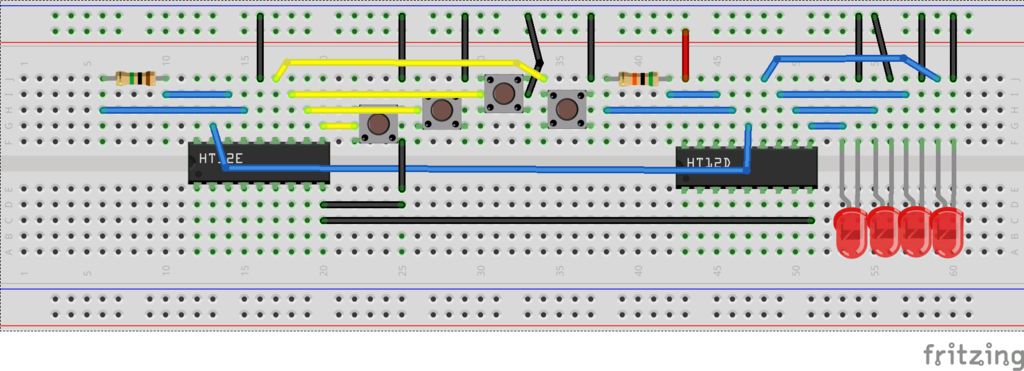
步驟6:發(fā)送器電路
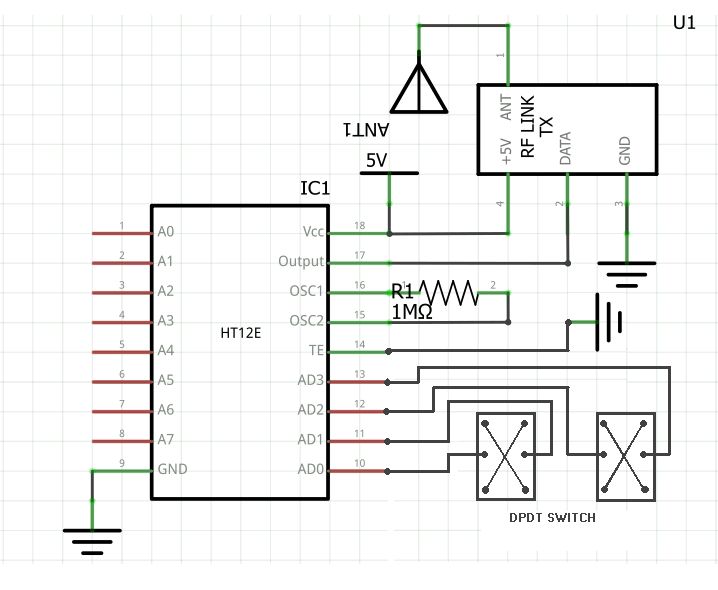
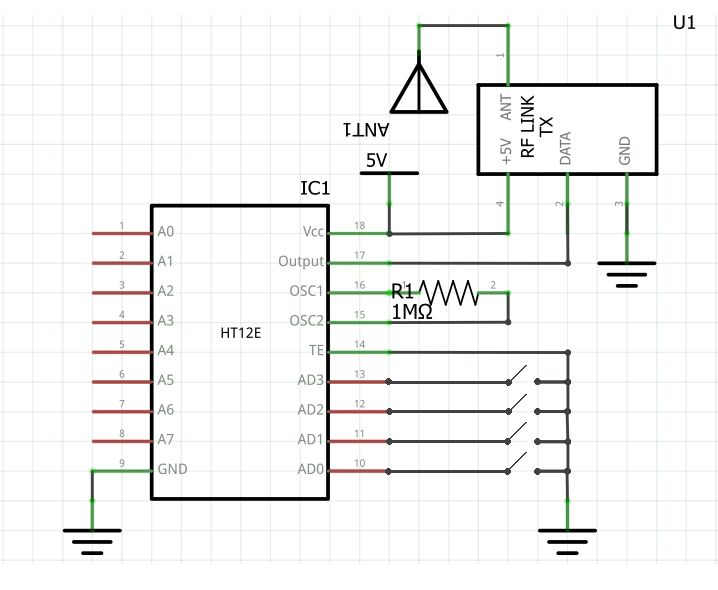
發(fā)射器電路由
HT12E編碼器
RF發(fā)射器模塊
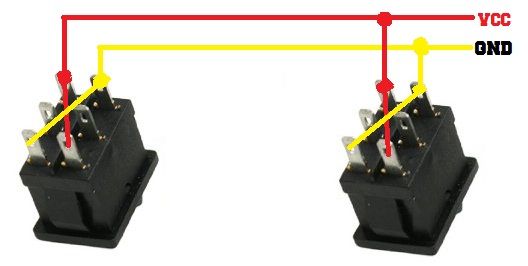
我有兩個DPDT開關
和1M電阻器
我有2個發(fā)送電路,一個帶DPDT開關,另一個帶按鈕
如圖6所示
HT12E PIN DESCRIPT ION
引腳(1-8)-輸出[A0,A1,A2,A3,A4,A5,A6,A7]的8位地址引腳
Pin 9 -接地[Gnd]
Pin(10,11,12,13)-4位輸入[AD0,AD1,AD2,AD3]的地址引腳
引腳14 -傳輸使能,低電平有效[TE]
Pin 15 -振蕩器輸入[Osc2]
引腳16 -振蕩器輸出[Osc1]
引腳17 -串行數(shù)據(jù)輸出[輸出]
引腳18 -電源電壓5V(2.4V-12V)[vcc]
A0-A7 -這些是8位地址引腳,用于輸出。
GND-此引腳也應連接到電源的負極。
TE -這是傳輸
Osc 1,2 -這些引腳是振蕩器的輸入和輸出引腳。此引腳彼此連接一個外部電阻。
輸出-這是一個輸出引腳。數(shù)據(jù)信號從該引腳發(fā)出。
Vcc -連接至正電源的Vcc引腳,用于為IC供電。
AD0-AD3 -這些是4位地址引腳。
步驟7:接收電路


接收器電路包括2個IC(HT12D解碼器,L293D電機驅動器),RF接收器模塊
電線按照接收器原理圖的電路(圖1)
接收器板上有2個LED,給接收器供電時一個點亮,而給發(fā)送器電路供電時另一個LED點亮
如果您的連接或RF TX RX模塊沒有問題,則在發(fā)射機處通電時,IC HT12D附近的LED應該點亮。
注意:如果電路有問題,則正極為黑色,負極為黑色,這將很容易調試電路
HT12D PIN說明
引腳(1-8)-8位地址引腳,用于輸出[A0,A1,A2,A3,A4,A5,A6,A7]
Pin 9 -接地[Gnd]
Pin(10,11,12,13)-輸入[AD0,AD1,AD2,AD3]的4位地址引腳
Pin 14 -串行數(shù)據(jù)輸入[Input]
Pin 15 -振蕩器輸入[Osc2]
Pin 16 -振蕩器輸入[Osc1]
Pin 17 -有效傳輸[VT]
Pin 18 -電源電壓5V(2.4V-12V)[vcc]
HT12D的引腳說明
VDD 和 VSS ::該引腳用于分別為IC,電源的正負極供電。
DIN:連接到RF接收器輸出。
A0 – A7 :這是地址輸入。這些引腳的狀態(tài)應與HT12E(用于發(fā)送器)中的地址引腳的狀態(tài)相匹配,以接收數(shù)據(jù)。這些引腳可以連接到VSS或懸空
D8 – D11:這是數(shù)據(jù)輸出引腳。這些引腳的狀態(tài)可以是VSS或VDD,具體取決于通過引腳DIN接收到的串行數(shù)據(jù)。
VT:代表有效傳輸。當D8 – D11數(shù)據(jù)輸出引腳上有有效數(shù)據(jù)時,此輸出引腳將為HIGH。
OSC1 和 OSC2: HT12D內部振蕩器的外部電阻。 OSC1是振蕩器輸入引腳,OSC2是振蕩器輸出引腳
L293D說明
L293D是電動機驅動器IC,它允許電動機繼續(xù)驅動雙向。 L293D是16針I(yè)C,每側有8個針腳,專用于控制電動機,該電動機可以在任何方向上同時控制一組兩個直流電動機。使用一個L293D,我們可以控制2個直流電動機,每個電動機有2個 INPUT 引腳,2個 OUTPUT 引腳和1個ENABLE引腳。 L293D由兩個H橋組成。 H橋是控制低額定電流電動機的最簡單電路。
引腳說明
引腳功能名稱
引腳1-啟用電機1的引腳[啟用1]
引腳2-電動機1的輸入引腳1 [輸入1]
引腳3-電動機1的輸出引腳1 [輸出1]
引腳4,5,12,13- -接地[GND]
引腳6-電機1的輸出引腳2 [輸出2]
引腳7- -電動機1的輸入引腳2 [輸入2]
引腳8-電動機的電源(9-12v)[Vcc]
引腳9-啟用電動機2的引腳[啟用2]
引腳10 -輸入引腳1用于電動機1 [輸入3]
引腳11 -用于電動機1 [輸出3]的輸出引腳2
Pin 14 -電動機1的輸出2 [Output4]
Pin 15 -電機1的輸入2 [輸入4]
引腳16 -供電電壓; 5V [Vcc1]
第8步:選擇電動機
選擇電動機非常重要,并且如果要制造較小的機器人,這完全取決于所制造的機器人(汽車)的類型
使用6v Bo電動機
如果您要制造更大的機器來承載更大的重量,請使用12v直流電動機
為您的電動機選擇轉速
RPM,代表每分鐘轉數(shù),是直流電動機的軸完成每分鐘完整旋轉周期的次數(shù)。完整的旋轉周期是指軸旋轉完整的360°。電機在一分鐘內完成的360°旋轉或旋轉是其RPM值
選擇rpm時要非常小心,不要選擇轉速更高的電機,因為這樣我很難控制它,并記住速度與扭矩成反比
步驟9:進行機箱
制造底盤非常簡單,只需要做兩件事
夾鉗
硬紙板,一塊木頭或任何用于制造底座的厚板和一些螺釘
拿起板,將夾子放在其上,標記要插入螺釘?shù)你@孔位置
在四個角處
擰緊夾具
將電動機插入夾具中,
將電路放置在機架上,將電動機連接到電路
為電路提供12v電源
有關詳細信息,請檢查照片
第10步:調試可選(如果有Pr電路障礙)
在這一部分中,我們將討論調試電路
首先不要生氣,只需保持冷靜
進行調試,我們將電路分為不同的
首先,我們將調試
L293D IC
將IC放在面包板上,將5v和Gnd接到IC,然后將12v接到引腳8。連接電機的使能引腳至5v。現(xiàn)在為一臺電動機的輸入供電,并用萬用表檢查輸出引腳。如果沒有顯示,則說明您的電動機驅動程序有問題
電源不足
電源電路中出現(xiàn)的大多數(shù)問題是由于短路引起的因此要檢查電路斷電并使用萬用表檢查負極和正極之間是否存在任何連接
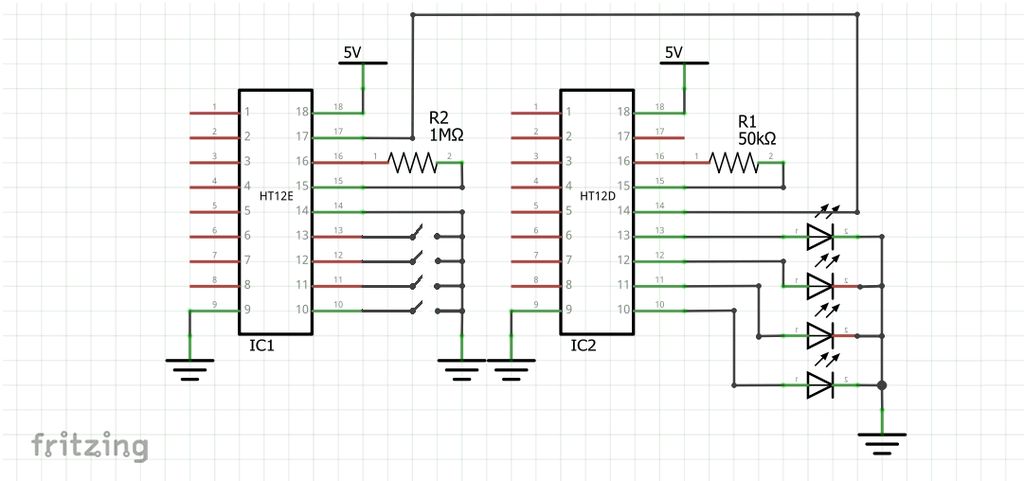
解碼器和編碼器
用于調試解碼器編碼器IC將HT12E的引腳7連接到HT12D的引腳14,將按鈕連接到HT12E的引腳10、11、12、13,并在解碼器的引腳10、11、12、13上連接4個LED(按照解碼器和編碼器調試電路[圖3])按下開關時,指示燈應點亮
如果您的機器人仍無法正常工作,則RF模塊可能存在問題,我們可以對其進行調試,因此請更換模塊。
-
射頻
+關注
關注
106文章
5729瀏覽量
169767 -
遙控車
+關注
關注
9文章
82瀏覽量
24341
發(fā)布評論請先 登錄
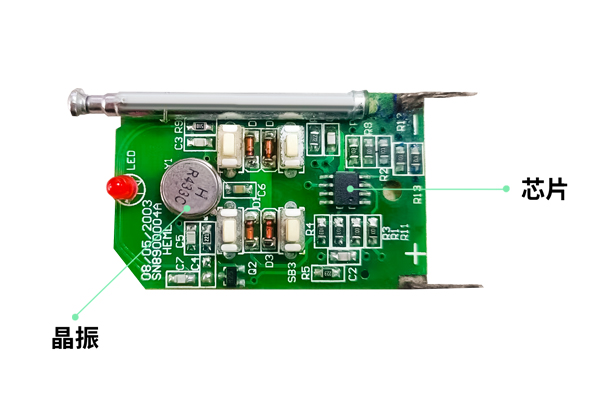
用射頻芯片開發(fā)的家電遙控器特點介紹
Sub-GHz射頻芯片,如何深度賦能工業(yè)遙控方案?

無線遙控車的電機抖動
基于雅特力AT32F421的遙控攀爬車電調應用方案

三相無線遙控開關怎么接線
一文講明——水泵遙控開關的作用和接線操作詳解

數(shù)字遙控器

簡單認識射頻同軸終端負載
RF遙控器廠家:射頻遙控器將成為未來的控制主流
如何選購適合的拷貝遙控器——增配遙控器教程來啦
開源項目!打造一款FPV頭部追蹤相機,讓你仿佛置身遙控車之中!
淺析射頻無線遙控器定制的意義——射頻肯定會取代紅外
2021款路虎攬勝運動版車遙控及一鍵起動功能失效

星閃挑戰(zhàn)UWB,指向遙控方案迎來新成員

遙控玩具車電機驅動應用中的雙H橋驅動芯片






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論