") 視障人士的Arduino輔助技術(shù)說(shuō)明
視障人士的Arduino輔助技術(shù)說(shuō)明

此裝置使用伺服器和蜂鳴器,它們對(duì)2個(gè)超聲波距離傳感器返回的讀取距離做出反應(yīng)。因此,如果您是盲人,并且以某種方式設(shè)法閱讀了這些內(nèi)容,并認(rèn)為這些圖片很酷,那么接下來(lái)要做的就是將很小的部分放在一起而看不到它們,很簡(jiǎn)單,然后您將不再傷了鼻子,腳尖踩在東西上,所以是完全值得的。在兩個(gè)肩膀上,您將擁有一個(gè)超聲波距離傳感器,該距離返回的距離是指伺服器(在同一肩膀上)按特定量(取決于距離)的距離,以及當(dāng)物品(距離傳感器看到的東西)也到達(dá)時(shí)的距離關(guān)閉蜂鳴器,在同一個(gè)肩膀上,安靜地發(fā)出嗶嗶聲,只是強(qiáng)調(diào)您的肩膀旁邊有一個(gè)物體。
步驟1:零件
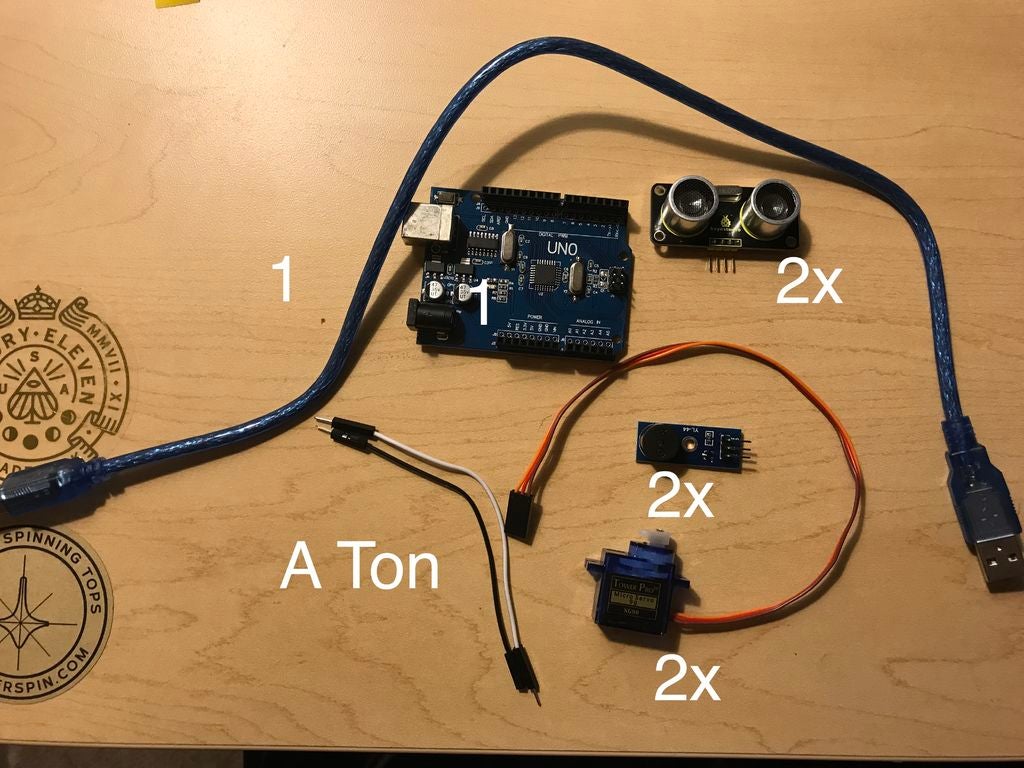
因此,該項(xiàng)目的零件數(shù)量相當(dāng)可觀,因?yàn)槲覀兊墓ぷ髁繉⑹且粋€(gè)肩膀所需傳感器/輸出設(shè)備的兩倍。
零件:
2 Servos(因?yàn)樗鼈冎挥糜谳p輕地壓在您的肩膀上,所以我使用了我能找到的最便宜的那些):http://www.ebay.com/itm/Align-T-Rex-Micro-Servo-Mo 。..
2個(gè)超聲波距離傳感器:http://www.ebay.com/itm/1pcs-Ultrasonic-Module-HC-。..
2個(gè)蜂鳴器(您可以使用任何蜂鳴器想要,例如壓電蜂鳴器或被動(dòng)蜂鳴器,但我將使用被動(dòng)蜂鳴器):http://www.ebay.com/itm/Passive- Buzzer-Alarm-Modul 。..
Arduino Uno(您可以使用想要/擁有的任何Arduino微控制器,但是我將使用Uno,因?yàn)樗萵ano/mini大,出于演示目的,它是更容易看到):http://www.ebay.com/itm/NEW-ATmega328-UNO-R3-Devel 。..
跳線(在此項(xiàng)目中,我們使用母對(duì)公,公對(duì)母男性,因此您只需要購(gòu)買所有三種類型的包裝,您肯定會(huì)最終使用它們):http://www.ebay.com/itm/120pcs-Dupont-Wire-Male-to.。.
面包板(僅用于將地面和5v電源分配給所有傳感器/輸出設(shè)備,我只是使用了很小的一個(gè)):http://www.ebay.com/itm/5pcs- Mini-25-Points-Breadb 。..
USB A/B(這是Arduino Uno的USB線,包含在上面的Arduino Uno鏈接中,但是如果您購(gòu)買的是另外一個(gè)還沒(méi)有包括它,這里是:http://www.ebay.com/itm/For-HP-CANON-DELL-Lexmark -。..)
現(xiàn)在,等待之后我們準(zhǔn)備了一年的零件開(kāi)始真正的構(gòu)建和編程。
第2步:連接電路
因此,與大多數(shù)項(xiàng)目一樣,您首先要在編寫硬件之前將其放在一起該軟件。首先,您要將蜂鳴器,伺服器和距離傳感器中的所有5v(+或Vcc)端口連接到面包板上(其中最左邊和一列將連接到Arduino Uno上的5v,然后連接一根電線)將連接到左側(cè)的第3列,因此您可以繼續(xù)將電線連接到5v端口)。現(xiàn)在,對(duì)地線(-s)進(jìn)行相同的操作,再次在兩列之間連接電纜。如果您的面包板比5x5大,則唯一需要做的更改就是不要使用多列(如果需要,可以這樣做,但沒(méi)有意義),所以不要使用連接電纜將5v排成一行到傳感器的地線和地線,以及從Arduino Uno的5v輸出和地線引出的輸出設(shè)備。
下一步,我們要將數(shù)字輸出/輸入引腳連接到正確的傳感器。由于距離傳感器比其他一個(gè)引腳的控制和輸入要稍微復(fù)雜一些。超聲波距離傳感器具有兩個(gè)不同的數(shù)字引腳,一個(gè)稱為Echo,另一個(gè)名為Trig。這些操作是Trig引腳輸出一個(gè)小脈沖,而Echo引腳接收它。基本上,一個(gè)充當(dāng)一點(diǎn)微型揚(yáng)聲器,另一個(gè)充當(dāng)麥克風(fēng),它使用聲音速度為每秒340.29米(或每秒1125英尺)的事實(shí)來(lái)計(jì)算距離,并將其插入公式distance =時(shí)間*聲速,其中時(shí)間=輸出超聲波與傳感器接收超聲波之間的時(shí)間。因此,既然我們了解了傳感器的工作原理,就可以使用它了。首先,將左側(cè)距離傳感器的Trig引腳連接到數(shù)字引腳12,將Echo引腳連接到d11。接下來(lái),將右側(cè)距離傳感器的Trig引腳連接到d10,將Echo引腳連接到d9。在代碼的后面,我們將把Echo引腳的引腳模式設(shè)置為輸入,將Trig引腳設(shè)置為輸出。
接下來(lái),我們將設(shè)置伺服器及其引腳,因?yàn)槊總€(gè)伺服器只能是一個(gè)針腳,只需控制伺服器要設(shè)置的角度即可。 Servos控制齒輪可以隨心所欲地連接您想要的東西,它們會(huì)將物體旋轉(zhuǎn)0至180度。因此,現(xiàn)在將左舵機(jī)連接到d5,將右舵機(jī)連接到d3。
現(xiàn)在,我們將設(shè)置最終組件,即蜂鳴器。壓電蜂鳴器的工作原理是包含一個(gè)壓電元件,該壓電元件會(huì)根據(jù)施加的電壓來(lái)回變形,從而產(chǎn)生可聽(tīng)見(jiàn)的聲音。因此,現(xiàn)在,將左蜂鳴器的引腳連接到d6,將右蜂鳴器的引腳連接到d4。
最后,將其插入計(jì)算機(jī)的USB端口或USB至插座適配器。
第3步:測(cè)試基本硬件
現(xiàn)在,我們已經(jīng)掛鉤了所有內(nèi)容,我們應(yīng)該在繼續(xù)編寫代碼之前對(duì)其進(jìn)行測(cè)試,想知道為什么要這樣做嗎?工作。因此,使用Arduino IDE將代碼上傳到文件中,您可以從以下鏈接下載該代碼:https://www.arduino.cc/en/Main/Software。在頂部的第二個(gè)矩形中單擊您的操作系統(tǒng),然后單擊“捐贈(zèng)”框下方的“僅下載”,或者如果您愿意,則捐贈(zèng)。..
在運(yùn)行該程序時(shí)應(yīng)該發(fā)生的事情是:
左伺服0度,然后90度,150。(每次移動(dòng)之間的1秒延遲)
右伺服0度,然后90,然后150。(同一件事)
右蜂鳴器頻率1000秒鐘,然后關(guān)閉。
左蜂鳴器頻率1000秒鐘,然后關(guān)閉。
然后打開(kāi)串行監(jiān)視器,然后右邊的距離傳感器的距離將被打印出來(lái)。
然后是左邊的距離傳感器。 (以厘米為單位,但是如果要進(jìn)行轉(zhuǎn)換,然后乘以.3937,或者可以更改代碼(第72和87行),則將轉(zhuǎn)換放在此處)
如果其中任何一項(xiàng)(或全部它們。..)不起作用,然后檢查相應(yīng)的(與傳感器/輸出設(shè)備相對(duì)應(yīng)的)數(shù)字引腳,并將其更改為正確的數(shù)字引腳,它也可能是Vcc的地,因此也請(qǐng)檢查這些引腳。如果不是那么好,那么您已經(jīng)完成了物理工作,現(xiàn)在就可以使用軟件。
第4步:編程
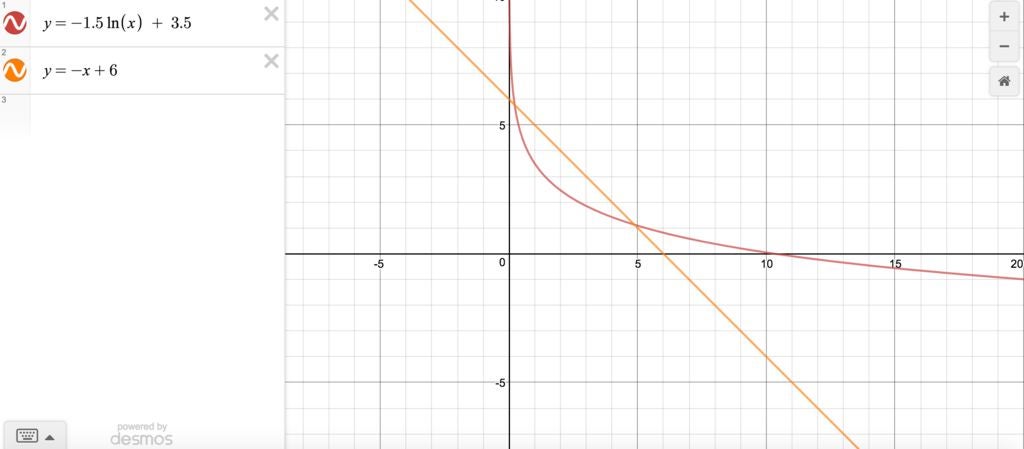
因此,現(xiàn)在我們準(zhǔn)備對(duì)此進(jìn)行編程。在文件中,我將詳細(xì)介紹注釋,因此在這里我不會(huì)多說(shuō)。通過(guò)查看我的注釋/代碼,可能不是很明顯的一件事是我定義的用于計(jì)算(根據(jù)從傳感器返回的距離)伺服器應(yīng)壓在肩膀上的功能。為此,我定義了一個(gè)分段函數(shù)(取決于x值,將決定y值的方程式將改變)。函數(shù)看起來(lái)像這樣:f(x)= {x 《5:-3/2(ln(x))+ 3.5,x》 = 5:-x +6。它定義了圖像中顯示的曲線。基本上,物體越靠近傳感器/人,指數(shù)就變得越來(lái)越硬(伺服系統(tǒng)施加的壓力),并且在6英尺遠(yuǎn)處完全停止推動(dòng)。
責(zé)任編輯:wv
-
傳感器
+關(guān)注
關(guān)注
2566文章
53008瀏覽量
767648 -
蜂鳴器
+關(guān)注
關(guān)注
12文章
895瀏覽量
46965 -
Arduino
+關(guān)注
關(guān)注
190文章
6498瀏覽量
192229
發(fā)布評(píng)論請(qǐng)先 登錄
避障也能預(yù)判?視覺(jué)黑科技讓掃地機(jī)器人開(kāi)啟“先知”模式
魔視智能亮相2025上海車展
港迪技術(shù)與海康威視達(dá)成戰(zhàn)略合作
震驚!樹(shù)莓派也開(kāi)始搞第三只眼技術(shù)?

Gemini Vision + Raspberry Pi 化身“數(shù)字導(dǎo)盲犬”?
RDK加持的導(dǎo)盲眼鏡:視障人士的“眼睛外掛”

工業(yè)應(yīng)用中輔助電源技術(shù)綜述

曠視亮相2024數(shù)字科技生態(tài)大會(huì)
海康威視數(shù)字孿生技術(shù)助力打造數(shù)字化工廠
技術(shù)指南 | 深視智能SS1系列顏色傳感器使用說(shuō)明書(shū)

使用NVIDIA Jetson打造機(jī)器人導(dǎo)盲犬
助盲環(huán)境感知裝置設(shè)計(jì)方案
技術(shù)指南 | 深視智能SD-C系列激光位移傳感器使用說(shuō)明書(shū)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論