") 怎樣從PC控制Arduino攝像頭機器人
怎樣從PC控制Arduino攝像頭機器人
步驟1 :布局
我已經(jīng)基于流行的DD1-1跟蹤平臺制造了這款機器人。您可以在Ebay或AliExpress上便宜地買到它。
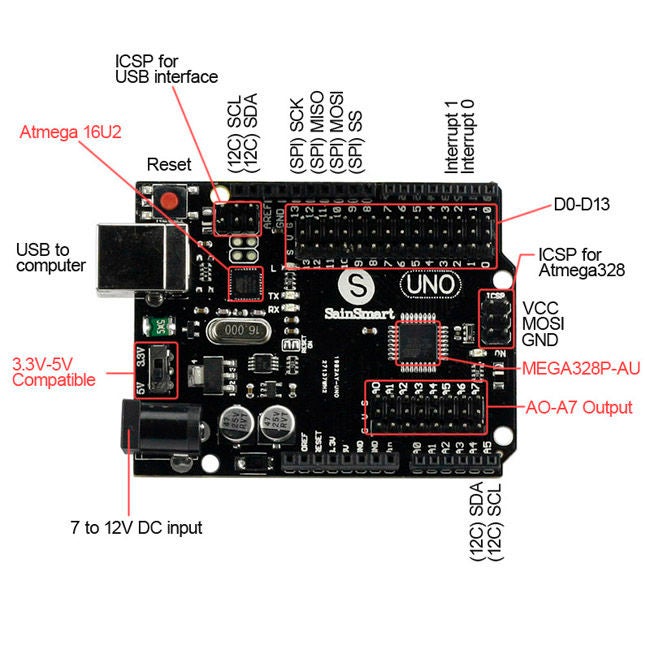
在板上,我放了一個簡單的IP攝像機(型號SRICAM IP001)和一個來自Sainsmart的Arduino Uno克隆。 》步驟2:電源
機箱是從兩塊薄的透明有機玻璃切割而成的。
《對于主電源,我使用鉛酸8伏/3.2 Ah電池。它比鎳鎘電池重,但便宜得多。
我還添加了一個1.6A的玻璃保險絲,因為IP攝像機是一個能源消耗者。電池充電器是一個簡單的300mA電池組,但您可以使用具有電流限制的10.8V電源。
我通過降壓LM2596電源模塊為相機提供5V電源。在我的原始設(shè)計中,我嘗試使用7805調(diào)節(jié)器,但是電池消耗非常快。
步驟3:軟件
為了進行交流,我在Visual Studio中編寫了一個程序,因此您需要使用.NET 4.0 Framework。
對于接收器上的控件,有HC-06,而在發(fā)送器上有便宜的藍牙加密狗(它在Windows 7上可以正常工作)。
我正在用一個簡單的分壓器監(jiān)控電壓有兩個10k電阻。兩端在+和–之間,中間連接到模擬輸入A0。
您可以在此處下載Arduino和.exe程序的代碼:
https://dl.dropboxusercontent.com/u/51764059/pardu 。..
更新1:
您可以在此處下載Visual Studio代碼:
https://dl.dropboxusercontent.com/u/51764059/Pardu 。..
(非常感謝tiktakx項目)并將其解壓縮。
如果您不知道如何編輯代碼,請先從Microsoft下載Visual Studio Express(免費版)。
然后在安裝后,轉(zhuǎn)到“打開”-》“項目”-》“ Parduino.sln”。在解決方案資源管理器中打開表單,然后雙擊要查看代碼的每個元素。
每次按一個鍵,藍牙都會向arduino發(fā)送一個字符。 F(向前),B(向后),L(左),R(向右),S(停止),G(向左),I(向右),H(向左),J(向右)。/p》
-
機器人
+關(guān)注
關(guān)注
213文章
29555瀏覽量
211905 -
攝像頭
+關(guān)注
關(guān)注
61文章
4959瀏覽量
97809 -
Arduino
+關(guān)注
關(guān)注
189文章
6493瀏覽量
190283
發(fā)布評論請先 登錄
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
社區(qū)安裝IPC攝像頭,跟安裝一般安防監(jiān)控攝像頭有什么區(qū)別?

米爾瑞芯微RK3576實測輕松搞定三屏八攝像頭
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊

攝像頭及紅外成像的基本工作原理







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論