") 研究人員提出了一個名為CommPlan的框架
研究人員提出了一個名為CommPlan的框架

在一項新的研究中,麻省理工學(xué)院計算機科學(xué)與人工智能實驗室的研究人員提出了一個名為CommPlan的框架,該框架為機器人提供了與人類遵循“良好禮節(jié)”原則的功能,并將其留給機器人做出使他們有效完成任務(wù)的決策。他們聲稱這是手工制定規(guī)則的一種出色方法,因為它使機器人能夠?qū)ζ錄Q策進行成本效益分析,而不必遵循特定于任務(wù)和上下文的策略。
CommPlan權(quán)衡一系列因素,包括一個人是否忙還是可能對給定的過去行為做出響應(yīng),利用一個專用模塊-Agent Markov模型-來代表該人的順序決策行為。它由模型規(guī)范過程和執(zhí)行時部分可觀察的馬爾可夫決策過程(POMDP)計劃程序組成,該計劃程序是作為機器人的決策模型而衍生的,CommPlan結(jié)合使用該模型來得出機器人的動作和通信策略。
使用CommPlan,開發(fā)人員首先使用數(shù)據(jù),領(lǐng)域?qū)I(yè)知識和學(xué)習(xí)算法指定五個模塊-任務(wù)模型,通信功能,通信成本模型,人員響應(yīng)模型和人員可選動作模型。通過對所有模塊的分析組合,得出決策模型,并且在任務(wù)執(zhí)行期間,機器人使用硬件傳感器,決策模型和POMDP求解器來計算其策略。最后,使用機器人的執(zhí)行器和通訊方式執(zhí)行策略。
為了評估CommPlan,研究人員進行了一項實驗,其中涉及帶有Robotiq抓手的Universal Robot 10和15名人類參與者,他們的任務(wù)是在廚房中做飯。機器人必須在0.3秒的規(guī)劃時間內(nèi)對一個較大的狀態(tài)空間進行推理,并確定(1)接下來應(yīng)裝滿四個杯子中的哪個杯子;(2)是否等待以確保安全或移動完成任務(wù),(3 )如果它選擇移動,其軌跡到達杯子,(4)是否使用其通信方式;(5)要傳達的通信消息。
該團隊報告說,該機器人成功地與人類合作完成了諸如組裝配料,包裹三明治和倒汁等任務(wù)。重要的是,與基線手工制定和無通信的靜默策略相比,它這樣做更加安全有效。
論文的共同作者和麻省理工學(xué)院的研究生沉力說:“許多手工制定的政策有點像是一個同事一直在困擾著你,而不是Slack,或者是一個微觀管理的老板反復(fù)問你取得了多少進展。” “如果您是緊急情況下的第一響應(yīng)者,那么與同事的過多溝通可能會分散您的主要任務(wù)。”
-
傳感器
+關(guān)注
關(guān)注
2565文章
52971瀏覽量
767197 -
機器人
+關(guān)注
關(guān)注
213文章
29726瀏覽量
212810 -
人工智能
+關(guān)注
關(guān)注
1806文章
49008瀏覽量
249305
發(fā)布評論請先 登錄
無刷直流電機雙閉環(huán)串級控制系統(tǒng)仿真研究
微雙重驅(qū)動的新型直線電機研究
研究人員開發(fā)出基于NVIDIA技術(shù)的AI模型用于檢測瘧疾
汽車座椅框架焊接技術(shù)進展與應(yīng)用研究
VirtualLab Fusion應(yīng)用:光波導(dǎo)系統(tǒng)的性能研究
蘋果研發(fā)ELEGNT框架,推動家用機器人動作自然化
大連理工提出基于Wasserstein距離(WD)的知識蒸餾方法
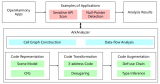
OpenHarmony程序分析框架論文入選ICSE 2025
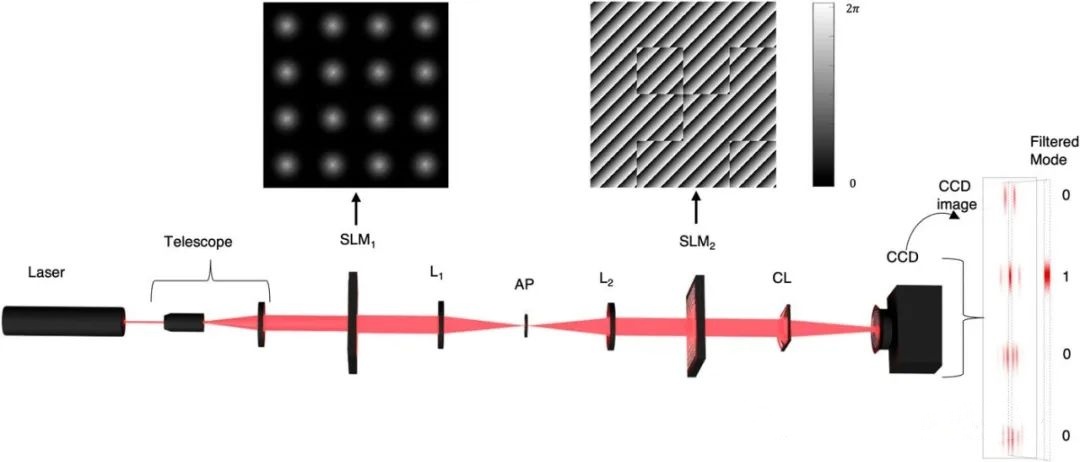
研究人員利用激光束開創(chuàng)量子計算新局面
一種面向飛行試驗的數(shù)據(jù)融合框架






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論