") 作為測試過程的頻率響應(yīng)方法及在液壓伺服系統(tǒng)中的應(yīng)用
作為測試過程的頻率響應(yīng)方法及在液壓伺服系統(tǒng)中的應(yīng)用

頻率響應(yīng)是指以正弦波作為命令輸入來繪制機(jī)器或過程輸出的動態(tài)響應(yīng)。測試設(shè)備可用于測試物理系統(tǒng),并且存在允許使用完全理論方法的分析技術(shù)和工具。在這里,我們將簡要介紹一下作為測試過程的頻率響應(yīng)方法,并總結(jié)系統(tǒng)設(shè)計師可以從這些過程和結(jié)果中獲得什么。
如果可以用正弦測試信號激勵設(shè)備并測量其輸出,則頻率響應(yīng)測試方法可以應(yīng)用于任何事物。在電液運(yùn)動控制中,制造商為伺服和比例閥發(fā)布的數(shù)據(jù)中最常遇到頻率響應(yīng)。實(shí)際上,我之所以主張使用伺服閥和比例閥(而不是其他類型的閥)的一個令人信服的原因是,因?yàn)樗欧y和比例閥存在太多的頻率響應(yīng)數(shù)據(jù),而其他設(shè)備幾乎沒有。有了這些信息,我們就可以在構(gòu)建系統(tǒng)之前更好地預(yù)測系統(tǒng)的性能。
頻率響應(yīng)測試非常簡單,觀察幾分鐘后即可輕松理解。這與在純學(xué)術(shù)環(huán)境中學(xué)習(xí)數(shù)月相反。這是一種用于測量元件(例如閥)動態(tài)響應(yīng)的方法。
另一種流行的動態(tài)測試程序是測量對階躍輸入的輸出響應(yīng)。頻率響應(yīng)和階躍響應(yīng)是相關(guān)的,因?yàn)樗鼈儊碜酝幌到y(tǒng)。但是,頻率響應(yīng)方法比階躍響應(yīng)更可靠,因?yàn)樵谑褂妙l率響應(yīng)分析儀時,在頻率響應(yīng)測試中固有地抑制了失真和噪聲。
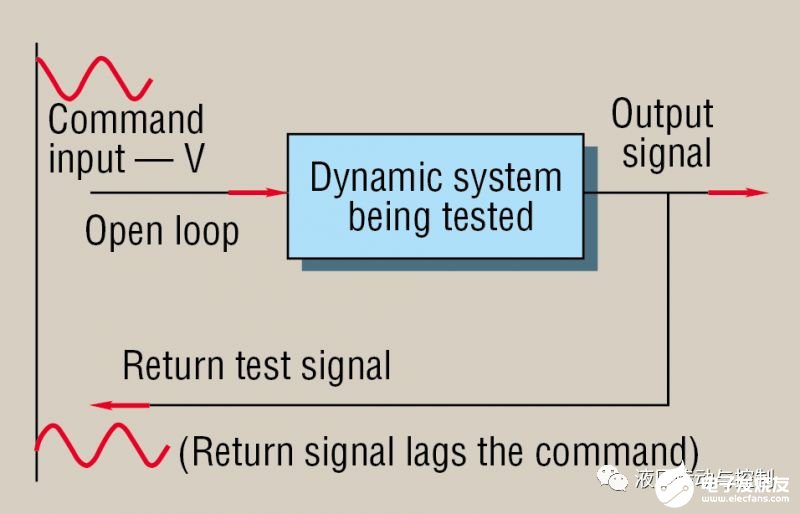
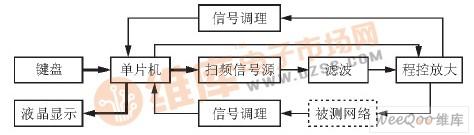
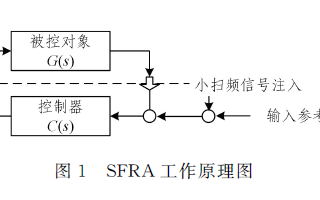
圖1.圖顯示了頻率響應(yīng)測試環(huán)路的框圖。頻率響應(yīng)可用作動態(tài)測試,因?yàn)楫?dāng)與頻率響應(yīng)分析儀結(jié)合使用時,它固有地抑制了失真和噪聲。
如圖1所示,該測試涉及對輸入施加受控幅度的正弦波形,從而使被測設(shè)備(例如閥)來回循環(huán)。同時,輸出也將以相同的頻率循環(huán)。但是,輸出和指令輸入的幅值不一定與指令輸入相同。就閥門而言,輸入(電流)和輸出(流量)甚至不在相同的度量單位中。此外,在大多數(shù)實(shí)際物理動態(tài)過程中,輸出將經(jīng)歷相位滯后。即,輸出必須一定落后于輸入。測試操作員記錄頻率,輸出幅值以及輸入和輸出之間的相位滯后量(以度為單位)。
接下來,增加頻率,同時將輸入正弦波保持在恒定的峰-峰值幅值。通常以度為單位繪制相位,并通過以下等式以分貝(dB)給出幅值:
A = 20 log | On÷Ol |
其中
A:閥頻率響應(yīng)的幅值
On:是任意頻率的輸出,并且
Ol:是最低頻率的輸出。因此,我們看到,對于最低的測試頻率,伺服閥的頻率響應(yīng)測試數(shù)據(jù)始終從0 dB開始。
在較高的測試頻率下,通常會出現(xiàn)較高的相位滯后,并且輸出幅值會發(fā)生變化。在任何類型的機(jī)器上,隨著頻率的增加,輸出幅值將無法跟上輸入幅值,這是正常現(xiàn)象。也就是說,總會有一些頻率的輸入命令振動得如此之快,以至于輸出根本無法跟上。因此,輸出幅值趨于隨頻率增加而減小,并且輸入與輸出之間的相位滯后趨于增大。
也有例外。當(dāng)被測系統(tǒng)中存在共振時,在某些狹窄的頻帶或范圍內(nèi),輸出幅值會隨頻率增加。當(dāng)存儲在彈簧或其他撓性構(gòu)件中的勢能與運(yùn)動質(zhì)量的動能交換時,就會發(fā)生共振。當(dāng)質(zhì)量的動能與內(nèi)部壓縮流體中存儲的勢能相互作用時,會在液壓系統(tǒng)中產(chǎn)生共振。
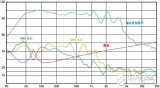
當(dāng)發(fā)生共振時,有時會隨著輸出振幅的增加而顯示出共振,從而增加頻率。圖2中所示的伺服閥頻率響應(yīng)數(shù)據(jù)就是這種情況。在30 Hz時,比0 dB參考值高出約0.8 dB。共振上升的存在表明閥有彈性的趨勢,如果使用階躍輸入進(jìn)行測試,則閥的輸出將趨向于在該頻率附近“響”。上升表明閥的設(shè)計者將其響應(yīng)調(diào)整為阻尼不足。大多數(shù)伺服閥已調(diào)整為無共振上升。但是,也有一些例外。阻尼不足的特性伴隨著共振上升。描述這種情況的一種方法是,“欠阻尼意味著存在過沖和共振上升”。
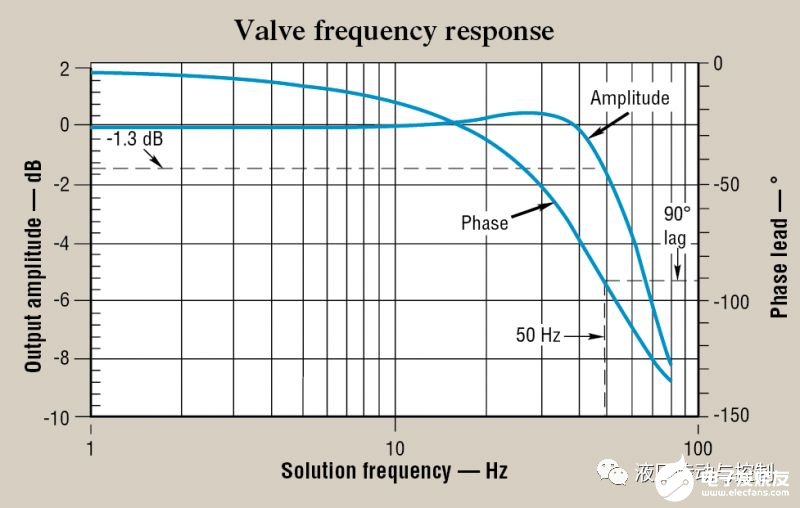
圖2.伺服閥頻率響應(yīng)數(shù)據(jù)顯示了當(dāng)質(zhì)量的動能與壓縮流體中存儲的勢能相互作用時,液壓系統(tǒng)中如何發(fā)生共振。振幅在30 Hz左右的升高表明存在共振,并且該閥設(shè)計為具有稍微欠阻尼的響應(yīng)。
圖2中的頻率響應(yīng)圖至少是許多伺服閥的典型特性,可以用來比較一個閥與另一個閥的響應(yīng)。任何閥的重要“基準(zhǔn)”頻率是相位滯后達(dá)到90°的頻率。請注意,在參考閥中,頻率約為50 Hz。顯然,如果有另一個閥門的90°相位滯后頻率高于50 Hz,則該閥門的響應(yīng)速度將比圖2中所示的更快。
將一個閥與另一個閥進(jìn)行比較時,應(yīng)始終使用90°相位滯后頻率。該頻率稱為閥頻率,閥頻率響應(yīng)或閥帶寬。所有術(shù)語或多或少都是同義詞。無論如何,該頻率有助于預(yù)測閥響應(yīng)與應(yīng)用系統(tǒng)所需性能之間的匹配程度。一些設(shè)計人員使用-3dB的頻率。但是,作為比較基準(zhǔn),這是不可靠的。在評估閥門與最終系統(tǒng)中其余部件的配合情況時,它也沒有價值。90°相位滯后頻率的最重要特征是,它使我們能夠?qū)㈤y頻率與液壓機(jī)械共振頻率進(jìn)行比較,液壓共振頻率是由于流體的可壓縮性(液壓電容或柔量)與執(zhí)行器負(fù)載質(zhì)量相互作用而產(chǎn)生的共振。
一些背景
在奈奎斯特(Nyquist)的開創(chuàng)性論文中,他將正弦分析的思想應(yīng)用到了動態(tài)系統(tǒng)中,但是在當(dāng)時非常受其它影響的情況下,他以非常神秘的數(shù)學(xué)術(shù)語將其應(yīng)用。九年后,Bode發(fā)表了同樣重要的論文。他教我們,通過以分貝表示正弦頻率響應(yīng)的幅值,將一個設(shè)備(例如閥)的幅值和相位響應(yīng)與另一設(shè)備(例如負(fù)載和執(zhí)行器子系統(tǒng))的幅值和相位響應(yīng)相加就變得很簡單。在那時,當(dāng)選擇計算輔助成為計算規(guī)則時,確實(shí)如此受歡迎。盡管計算機(jī)發(fā)生了革命性的變化,并且計算機(jī)執(zhí)行復(fù)雜的計算非常容易,但是眾所周知的Bode圖仍然是系統(tǒng)設(shè)計人員最喜歡的工具。
Bode和Nyquist(都是貝爾實(shí)驗(yàn)室的研究工程師)對確定為什么某些音頻放大器會突然振蕩而另一些音頻放大器不會突然振蕩的想法很感興趣。如今,運(yùn)動控制和反饋控制系統(tǒng)的設(shè)計人員仍在為機(jī)器的振動問題而苦苦掙扎。如果繼續(xù)下去,這種振蕩可能是自毀的。頻率響應(yīng)方法使我們能夠合理估計將產(chǎn)生穩(wěn)定的,無振蕩的伺服機(jī)構(gòu)的電子調(diào)諧極限。
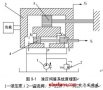
博德的方法要求我們測試和研究開環(huán)系統(tǒng),然后使用分析技術(shù)詢問“假如是”閉環(huán)會如何。例如,可以在開環(huán)配置中測試完整的位置伺服機(jī)構(gòu)(圖3),以找到使系統(tǒng)不穩(wěn)定的必要條件。請注意,我們不是使用正弦測試數(shù)據(jù)(頻率響應(yīng)特性)來確定系統(tǒng)在正弦輸入下的性能,而是在系統(tǒng)振蕩之前可以獲得多少伺服環(huán)路增益。這就是頻率響應(yīng)方法的精妙之處。
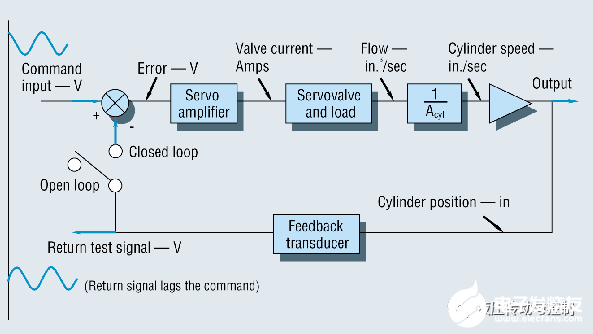
圖3.左側(cè)的開關(guān)允許在開環(huán)配置下測試該閉環(huán)電液系統(tǒng),以確定引起不穩(wěn)定的頻率響應(yīng)特性。然后,該系統(tǒng)可以以減少到引起振蕩的增益的一半左右的增益進(jìn)行操作。
為了說明這一點(diǎn),請考慮圖3的系統(tǒng)。它將首先在開環(huán)位置使用反饋開關(guān)進(jìn)行測試。隨著頻率的增加,我們尋找在指令輸入和開環(huán)反饋信號之間造成180°相位滯后的任何頻率。(在水力機(jī)械系統(tǒng)中,基本上可以確定存在此頻率。)在該頻率下,如果輸出(開環(huán)反饋信號)的幅值等于或大于輸入命令幅值,則可以閉合反饋開關(guān)。然后,通過負(fù)反饋過程,該180°相位移將經(jīng)另一個180°相位。結(jié)果是可以消除正弦指令輸入激勵,并且閉環(huán)系統(tǒng)將處于持續(xù)振蕩狀態(tài)。這是一個不穩(wěn)定的系統(tǒng),如果無法停止振蕩,則是不切實(shí)際的。減小伺服環(huán)路增益是停止振蕩的正常過程。這是通過更改伺服放大器的增益設(shè)置來實(shí)現(xiàn)的。
上一段以非數(shù)學(xué)的形式提出了伺服回路穩(wěn)定性的經(jīng)典標(biāo)準(zhǔn)。通過更改對180°相位頻率的搜索,可以簡化一點(diǎn)。考慮以下情況:假設(shè)在搜索中找到了臨界的180°相位頻率,但是開環(huán)反饋信號的幅值小于命令輸入幅值。該頻率下的開環(huán)增益小于1,在分貝標(biāo)度上小于零。
現(xiàn)在我們問自己:“如何增加增益,使反饋信號幅值等于指令信號幅值(伺服環(huán)路增益為零dB)?”我們只需要增加伺服放大器的增益,系統(tǒng)就會陷入振蕩。因此,只要有180°的相位頻率,只要增加伺服放大器的增益即可實(shí)現(xiàn)持續(xù)振蕩。每個電液系統(tǒng)都存在一個180°的相位頻率,因此我們始終可以將這種系統(tǒng)調(diào)整到不穩(wěn)定的程度。
當(dāng)然,我們不希望系統(tǒng)振蕩。調(diào)整到不穩(wěn)定點(diǎn)的目的是找到將產(chǎn)生不穩(wěn)定的最終增益。然后將增益減小到引起穩(wěn)定振蕩的值的一半左右,并留在那里。增益降低50%大約等于5 dB的增益裕度。即,將增益設(shè)置為低于不穩(wěn)定點(diǎn)5 dB。對于許多電動液壓運(yùn)動控制系統(tǒng)而言,這已足夠。在設(shè)計過程中使用頻率響應(yīng)方法,我們可以預(yù)測不穩(wěn)定性的增益。因此,我們可以從不穩(wěn)定性中估計出伺服系統(tǒng)中預(yù)期的誤差。
共振頻率和閥頻率
流體力學(xué)共振頻率(HMRF)與流體體積和負(fù)載質(zhì)量成反比:受壓流體體積越大,負(fù)載質(zhì)量越大,HMRF越低。HMRF越低,實(shí)現(xiàn)伺服系統(tǒng)的快速響應(yīng)控制就越困難。相反,系統(tǒng)變得緩慢而富有彈性。確實(shí),有些人將流體的可壓縮性等同于彈簧。這個比喻有一定的價值。
當(dāng)HMRF太低時,這種彈性可能是系統(tǒng)的瓶頸。我見過HMRF低至0.5 Hz,高至700Hz以及介于兩者之間的所有值的系統(tǒng)。HMRF低是大負(fù)載質(zhì)量連接到小油缸的特征。增加油缸面積始終具有提高HMRF的作用。當(dāng)HMRF小于閥的頻率時,它將成為系統(tǒng)的瓶頸。閥頻率fv是根據(jù)閥門制造商發(fā)布的頻率響應(yīng)測試數(shù)據(jù)產(chǎn)生90°相位滯后的頻率。
現(xiàn)在,我們有了將一種頻率與另一種頻率進(jìn)行比較的直接基礎(chǔ),這使我們能夠得出重要的結(jié)論。的確,當(dāng)小于閥頻率時,HMRF會限制系統(tǒng)響應(yīng)。但是,當(dāng)閥的頻率小于HMRF時,閥將成為限制裝置。規(guī)則很簡單:動態(tài)瓶頸是fv和fn中的較小者。
通常,當(dāng)系統(tǒng)的HMRF小于其閥頻率時,很難設(shè)計出具有清晰響應(yīng)的系統(tǒng)。不幸的是,系統(tǒng)的HMRF通常低于其閥頻率。因此,這意味著HMRF通常是主要的,這代表了最具挑戰(zhàn)性的設(shè)計方案。換句話說,最壞的情況是最常見的情況。
此外,當(dāng)閥頻率約為HMRF的兩倍時,提高閥頻率對系統(tǒng)性能的影響可忽略不計,因?yàn)樾阅軐缀跬耆艿紿MRF的影響。應(yīng)該清楚的是,閉環(huán)帶寬必須始終小于fv和fn中的較小者。唯一剩下的問題是:少多少?
閉環(huán)帶寬的限制
最大閉環(huán)帶寬(頻率響應(yīng))必須小于一個稱為分離比的值,該值始終小于1。用數(shù)學(xué)術(shù)語來說:
fmax 《 ps ×(lesser of fv or fn)(fv 或fn中的較小者),
其中
fmax 是最大系統(tǒng)關(guān)閉帶寬
ps 是分離率,并且
fv 和 fn是閥和油缸負(fù)載共振頻率,單位為Hz。
當(dāng)HMRF占主導(dǎo)地位(《fv)時,分離比完全由液壓機(jī)械系統(tǒng)的阻尼比控制:
ps =2Zn
其中
Zn是阻尼比,是振動減弱趨勢的度量。
造成阻尼的因素有兩個:從執(zhí)行器一側(cè)到另一側(cè)的內(nèi)部泄漏(無論是從執(zhí)行器內(nèi)部還是從控制閥內(nèi)部泄漏)和摩擦(是否來自執(zhí)行器或其負(fù)載)。由于制造商努力減少內(nèi)部泄漏和摩擦,因此大多數(shù)液壓機(jī)械系統(tǒng)的阻尼度可能會非常低,這不足為奇。實(shí)際上,當(dāng)負(fù)載可以以可忽略的摩擦力移動時(如由循環(huán)線性球軸承支撐時),阻尼比可能低至0.03或0.05。誠然,系統(tǒng)摩擦和阻尼比是要在系統(tǒng)中評估的最難以捉摸的量。但是,它們與頻率一起絕對控制著系統(tǒng)的性能極限。
計算示例
考慮一個示例來演示此討論。假設(shè)已計算出系統(tǒng)的油缸機(jī)械共振頻率,發(fā)現(xiàn)其為18 Hz。進(jìn)一步假設(shè)其伺服閥的90°相位滯后頻率為65 Hz,并且由于摩擦和內(nèi)部閥門泄漏,我們估計液壓機(jī)械阻尼比約為0.05。我們可以計算出最大可能的閉環(huán)系統(tǒng)帶寬:
fmax 《 ps x( fv 或 fn的小者)
fmax 《2 x 0.05 x 18
fmax 《1.8 Hz
最大閉環(huán)帶寬fmax 只有1.8 Hz,僅為HMRF的十分之一!在啟動時,我們通過增加伺服放大器增益來增加系統(tǒng)帶寬。如果我們增加增益直到帶寬達(dá)到1.8 Hz,然后再嘗試進(jìn)一步增加,則伺服回路將陷入持續(xù)的振蕩狀態(tài),從而變得毫無價值。必須降低增益以重新建立穩(wěn)定性。
系統(tǒng)帶寬之所以重要,是因?yàn)樗c定位精度(或更準(zhǔn)確地說,是定位誤差和跟隨誤差)之間存在直接的反比關(guān)系。已經(jīng)表明:
?xp = (?IT × Gsp)/(2’ fsys)
其中
?xp 是預(yù)期的穩(wěn)態(tài)定位誤差(in。)
?IT 是由八種已知的外部干擾引起的總預(yù)期閥電流變化(安培),
Gsp是最高預(yù)期速度和負(fù)載下的速度增益[(in.x A)/秒],并且
fsys是實(shí)際的閉環(huán)系統(tǒng)帶寬(Hz)。
輸出位置永遠(yuǎn)不會是我們想要的位置-只能關(guān)閉。電液位置伺服機(jī)構(gòu)中存在八種導(dǎo)致定位不完善的已知干擾:
? 閥溫度變化
? 供油壓力變化
? 回油箱油口壓力變化
? 分離摩擦
? 負(fù)載變化
? 閥滯環(huán)
? 閥閾值,以及
? 閥死區(qū)。
所有這些必須分解為等效的閥電流,然后加在一起得出總的預(yù)期閥電流,即IT增量。總的來說,評估給定系統(tǒng)的這八個“錯誤貢獻(xiàn)者”不僅僅是一個瑣碎的過程。但是,經(jīng)驗(yàn)告訴我們,對于具有“典型”伺服閥性能的零遮蓋閥,?IT 約為閥額定電流的2%或3%。如果閥是成比例的并且具有實(shí)質(zhì)性的遮蓋,則我們通常僅使用遮蓋而忽略其他七個貢獻(xiàn)者。
從技術(shù)上講,對于最壞的負(fù)載條件,必須使用所選控制閥的特性來計算速度增益。如果設(shè)計人員采用良好的工程實(shí)踐來選擇控制閥(如果選擇該閥以在最壞的負(fù)載和速度組合下提供最大的功率傳遞),那么速度增益Gsp將等于目標(biāo)設(shè)計執(zhí)行器速度除以約為閥額定電流的2/3。有了這些信息,我們現(xiàn)在可以估計預(yù)期的系統(tǒng)“準(zhǔn)確性”。
假設(shè)我們正在設(shè)計的系統(tǒng)在最壞情況下必須使用基本上為零遮蓋的伺服閥以21in./sec的速度推動負(fù)載。可以首先計算該頁面左上部分的分子:
?IT × Gsp = (0.02 × IR x 21) ÷ (0.67× IR),
其中
IR是閥的額定電流,可以從公式中抵消。
現(xiàn)在
?IT Gsp=(0.02×21)×0.67
?IT Gsp = 0.63英寸/秒
如果我們假設(shè)伺服回路已經(jīng)在不穩(wěn)定性發(fā)生之前調(diào)整到允許的最大值,則fsys設(shè)置為fmax,因此可以估算誤差:
?xp = ?IT Gsp÷2 ’ fsys
但是由于分子已經(jīng)被求值:
?xp = 0.63÷(2′×1.8),
?xp=±0.055 in
這樣,我們可以預(yù)期該系統(tǒng)的長期定位能力約為0.055 in。
責(zé)任編輯:gt
-
頻率
+關(guān)注
關(guān)注
4文章
1560瀏覽量
60180 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
584瀏覽量
40029
發(fā)布評論請先 登錄
連續(xù)時間LTI系統(tǒng)的頻率響應(yīng).ppt
液壓伺服系統(tǒng)的工作特性及原理
分析穩(wěn)定系統(tǒng)中的慣性MEMS的頻率響應(yīng)
頻率響應(yīng)是什么意思_頻率響應(yīng)特性
伺服系統(tǒng)的發(fā)展及其在機(jī)電設(shè)備中的應(yīng)用
音響頻率響應(yīng)多少好_頻率響應(yīng)大好還是小好
液壓伺服系統(tǒng)的組成_液壓伺服系統(tǒng)的優(yōu)缺點(diǎn)
由單片機(jī)和DDS設(shè)計的頻率響應(yīng)測試儀
液壓伺服系統(tǒng)有幾種類型_液壓伺服系統(tǒng)的應(yīng)用
針對C2000系列處理器的軟件頻率響應(yīng)分析器工具





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論