") 傳感器測量怎么做才能穩(wěn)定呢?
傳感器測量怎么做才能穩(wěn)定呢?
今天遇到一個網(wǎng)友問一個問題,他有一個傳感器測量一個物理量,需要判斷其變化趨勢,我給了一些建議,這里將這個建議展開做些深入分析,并分享給大家。
本文想借此表達一下個人的一個觀點,做開發(fā)如果遇到無法解決的難題,可以試著從數(shù)學(xué)的角度出發(fā),看能否找到答案。
是個啥坑?一個項目中用到一個傳感器測量一物理量,這里假定測量溫度吧。需要判斷其變化趨勢,利用這個變化趨勢去做一些應(yīng)用。
那么要怎么判斷一個物理量的變化趨勢呢?我們能自然能想到去求取該隨機序列的變化率。這里涉及到一些數(shù)序定義。隨機序列有很多可能的來源,最為常見是模數(shù)采樣。
這樣將S(t)信號轉(zhuǎn)換為離散信號序列S(n),那么對于當前時刻其斜率怎么求取呢?(這里忽略中間的過度態(tài),僅將其看為線段相連,當然現(xiàn)實應(yīng)用中如果有更高要求,可以做曲線擬合)
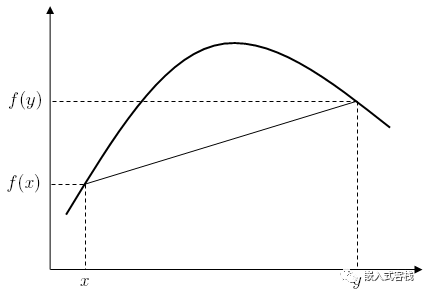
但是如果只判斷,斜率極容易誤判,比如下面這樣的情況:
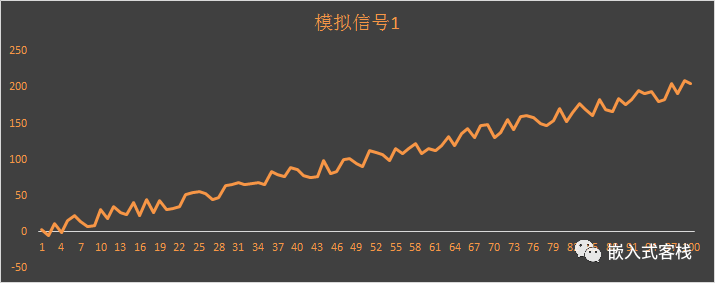
其斜率一會兒正,一會兒負,但是其總體趨勢又是在增加的,所以只考察斜率顯然不可取,獲取需要在代碼在加各種復(fù)雜的條件或者限值去判斷。即使加這么多條件系統(tǒng)仍然可能表現(xiàn)的非常不健壯。
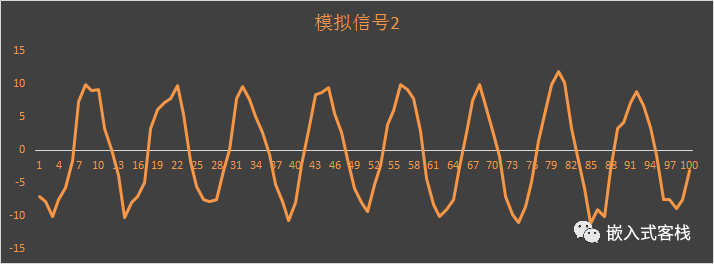
對于模擬信號2而言,趨勢又在不斷變化。那么怎么做才能穩(wěn)定呢?先賣個關(guān)子?
函數(shù)的凹凸性凹函數(shù)凹函數(shù)是一個定義在某個向量空間的凸集C(區(qū)間)上的實值函數(shù)f。設(shè)f為定義在區(qū)間I上的函數(shù),若對I上的任意兩點x1《x2和任意的實數(shù)t屬于(0,1),總有,
則稱函數(shù)f為l上凹函數(shù),有的書上也稱為下凸函數(shù)。
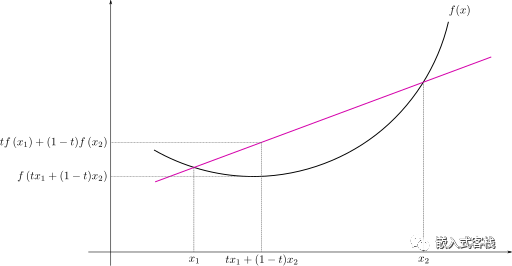
如果把上述條件中的“≥”改成“》”,則叫做嚴格上凹函數(shù),或叫做嚴格下凸函數(shù)。
上面是一維函數(shù)情況,這里來個2維函數(shù)的圖,剛方便理解
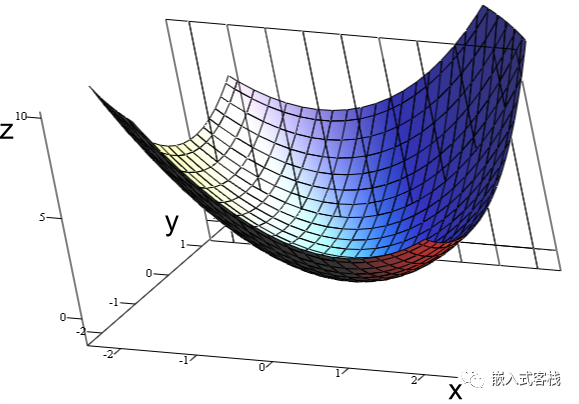
凸函數(shù)設(shè)f為定義在區(qū)間I上的函數(shù),若對I上的任意兩點x1《x2和任意的實數(shù)t屬于(0,1),上面不等式變成大于等于,則在該區(qū)間為凸函數(shù)。
可見,凹凸是相對的,如f(x)在某區(qū)間為凹,則-f(x)則在該區(qū)間為凸。
性質(zhì)若一個函數(shù)在某區(qū)間二階可導(dǎo)且大于0,則函數(shù)在該區(qū)間為凹函數(shù)
若一個函數(shù)在某區(qū)間二階可導(dǎo)且小于0,則函數(shù)在該區(qū)間為凸函數(shù)
證明,這里就不推導(dǎo)了,可以利用拉格朗日中值定理可以推導(dǎo)出上面這個性質(zhì)。
來看一下會動的圖,加深一下理解:
函數(shù)從到切線為藍色,曲線向上凹,綠色表示曲線是向下凹的,紅色表示曲線的拐點。
sin(2x)的一階導(dǎo)數(shù)為:
sin(2x)的二階導(dǎo)數(shù)為:
回到坑里通過上面裝逼,是否可以利用離散序列的求導(dǎo)數(shù)來判斷傳感器的變化趨勢。啥?導(dǎo)數(shù)?又要開始表演了?
前面說了一階導(dǎo)數(shù)是這樣的:
那么二階導(dǎo)數(shù)是哪樣捏?
化簡一下:
其中S[n]表示當前測量點,S[n-1]表示前一個測量點,S[n-2]表示前第2個測量點。應(yīng)為+S[n-2]
上代碼#include 《stdio.h》
#include 《math.h》
#include 《string.h》
typedef struct _T_2ND_DRV
float xn1;
float xn2;
}t_2ND_DRV;
typedef struct _T_1ST_DRV
float xn1;
}t_1ST_DRV;
void init_second_derivative(t_2ND_DRV *pSndDrv)
pSndDrv-》xn1 = 0;
pSndDrv-》xn2 = 0;
float second_derivative(t_2ND_DRV *pSndDrv, float xn,float T)
float result=0.0f;
if(T《=0)
return 0x7FBFFFFF; /*非法數(shù)據(jù)*/
result = (xn-2*pSndDrv-》xn1+pSndDrv-》xn2)/T/T;
pSndDrv-》xn2 = pSndDrv-》xn1;
pSndDrv-》xn1 = xn;
return result;
void init_fisrt_derivative(t_1ST_DRV *p1stDrv)
p1stDrv-》xn1 = 0;
float fisrt_derivative(t_1ST_DRV *p1stDrv, float xn,float T)
float result=0.0f;
if(T《=0)
return 0x7FBFFFFF; /*非法數(shù)據(jù)*/
result = (xn-p1stDrv-》xn1)/T;
p1stDrv-》xn1 = xn;
return result;
#define PI 3.1415f
#define SAMPLE_RATE 500.0f
#define SAMPLE_T (1/SAMPLE_RATE)
#define SAMPLE_SIZE (100)
int main()
float sim1[SAMPLE_SIZE];
float sim2[SAMPLE_SIZE];
float out1[SAMPLE_SIZE];
float out2[SAMPLE_SIZE];
t_2ND_DRV sndDrv;
t_1ST_DRV frtDrv;
init_fisrt_derivative(&frtDrv);
init_second_derivative(&sndDrv);
FILE *pFile=fopen(“。/simulationSin.csv”,“wt+”);
if(pFile==NULL)
printf(“simulationSin.csv opened failed”);
return -1
for(int i=0;i《SAMPLE_SIZE;i++)
sim1[i]=10*sin(2*PI*10*i/500);
for(int i=0;i《SAMPLE_SIZE;i++)
out1[i]=fisrt_derivative(&frtDrv,sim1[i],SAMPLE_T);
out2[i]=second_derivative(&sndDrv,sim1[i],SAMPLE_T);
fprintf(pFile,“%f,%f,%f
sim1[i],out1[i],out2[i])
fclose(pFile);
return 0;
忽略前兩個點,利用excel生成曲線:
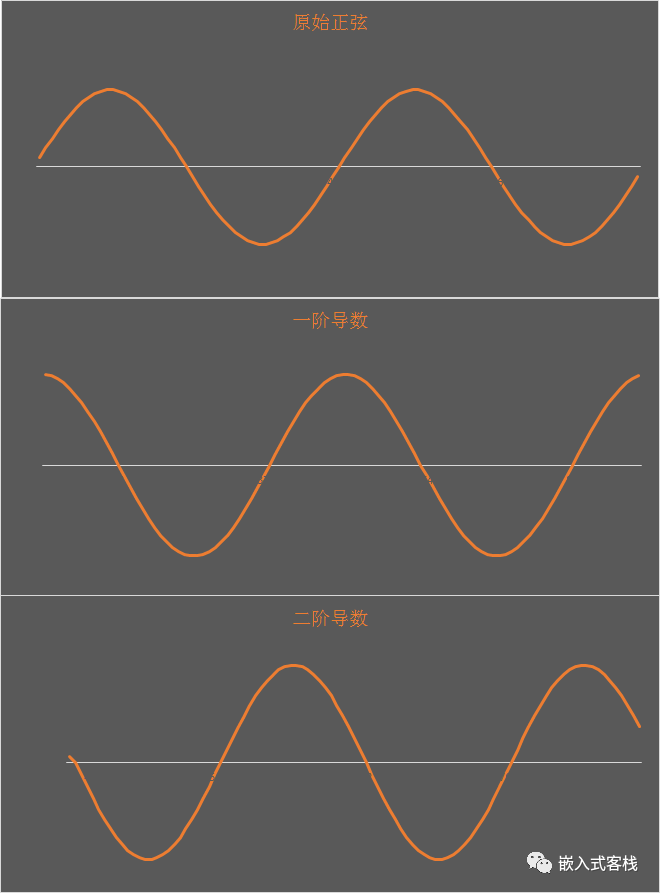
從圖中可看出:
一階導(dǎo)數(shù)為正時,函數(shù)遞增趨勢;
一階導(dǎo)數(shù)為負時,函數(shù)遞減趨勢;
二階導(dǎo)數(shù)為0時,出現(xiàn)拐點,趨勢改變;此時如果左右兩側(cè)的一階導(dǎo)符號相反,則出現(xiàn)極值。
二階導(dǎo)數(shù)為負時,其一階導(dǎo)數(shù)也即原函數(shù)斜率規(guī)律單調(diào)減,二階導(dǎo)數(shù)為正時,其一階導(dǎo)數(shù)也即原函數(shù)斜率規(guī)律單調(diào)增。
再進一步:
一階導(dǎo)數(shù)與二階導(dǎo)數(shù)結(jié)合起來看,就可以看出測量值變化趨勢的趨勢,比如在前1/4周期,此區(qū)間變換趨勢為增,也即一階導(dǎo)數(shù)為正,而其二階導(dǎo)數(shù)為負,也可以看出遞增的趨勢是逐漸減小到0的。
代碼優(yōu)化如果只是做定性判斷,上述函數(shù),完全沒必要與采樣周期做除法,只需要考察其增量即可,代碼可優(yōu)化如下:
typedef struct _T_2ND_DRV
float xn1;
float xn2;
}t_2ND_DRV;
typedef struct _T_1ST_DRV
float xn1;
}t_1ST_DRV;
void init_second_derivative(t_2ND_DRV *pSndDrv)
pSndDrv-》xn1 = 0;
pSndDrv-》xn2 = 0;
float second_derivative(t_2ND_DRV *pSndDrv, float xn)
float result=0.0f;
result = xn-2*pSndDrv-》xn1+pSndDrv-》xn2;
pSndDrv-》xn2 = pSndDrv-》xn1;
pSndDrv-》xn1 = xn;
return result;
void init_fisrt_derivative(t_1ST_DRV *p1stDrv)
p1stDrv-》xn1 = 0;
float fisrt_derivative(t_1ST_DRV *p1stDrv, float xn)
float result=0.0f;
result = xn-p1stDrv-》xn1;
p1stDrv-》xn1 = xn;
return result;
意外收獲這里意外引入一個可能很多人沒注意的知識點NaN,在計算中,NaN代表非數(shù)字,是數(shù)字數(shù)據(jù)類型的成員,可以將其解釋為不確定的或無法表示的值,尤其是在浮點運算中。1985年,IEEE 754浮點標準引入了NaN的系統(tǒng)使用,并表示了其他無限量(如無窮大)。
前述函數(shù)返回0x7FBFFFFF,也就是表示無窮大。
不同的操作系統(tǒng)和編程語言可能具有NaN的不同字符串表示形式:
nan
NaN
NaN%
NAN
NaNQ
NaNS
qNaN
sNaN
1.#SNAN
1.#QNAN
-1.#IND
實際上,由于編碼的NaN具有符號,因此通常也可以在NaN的字符串表示中找到它們,例如:
-NaN
NaN12345
-sNaN12300
-NaN(s1234)
工程應(yīng)用這里給出我的建議方案:
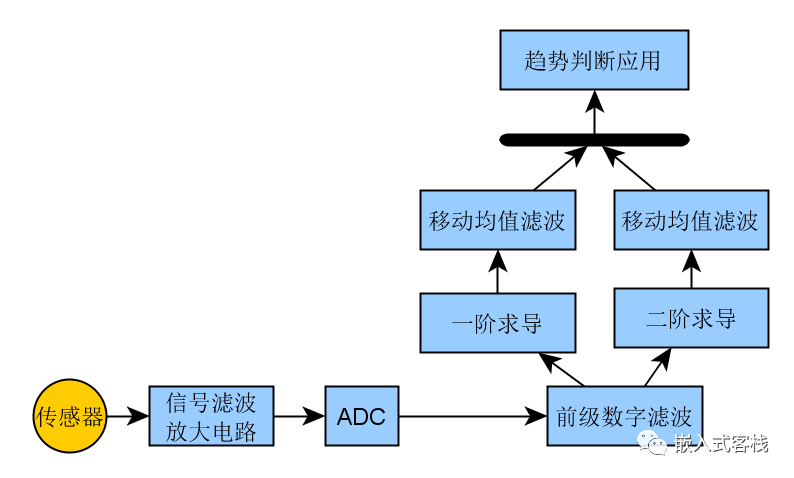
將傳感器信號經(jīng)由電路處理,模數(shù)采樣,在進入前級數(shù)字濾波器,濾除不必要的噪聲,在進行一階/二階求導(dǎo)。對于一階和二階求導(dǎo)再做一級移動平均濾波,最后在按照上面描述進行判別變化趨勢,則個人認為基本就比較健壯了。實際移動均值濾波長度不宜選擇過長,否則響應(yīng)就比較滯后了。不能對傳感器的變化趨勢做出實時的判別。加了后級均值濾波器,則會消除由于波形忽上忽下的隨機噪聲干擾影響,使得系統(tǒng)判別更為健壯,實際濾波器長度需根據(jù)不同的場合進行調(diào)試優(yōu)化。或者也可以選擇別的IIR/FIR濾波器形式實現(xiàn)。
總結(jié)一下做為嵌入式er編程,有時候有必要去看看數(shù)學(xué)書,了解一下數(shù)學(xué)原理的背后故事,可能會給你帶來意想不到的作用哦。
責任編輯:pj
-
傳感器
+關(guān)注
關(guān)注
2564文章
52700瀏覽量
764563 -
嵌入式
+關(guān)注
關(guān)注
5143文章
19569瀏覽量
315653 -
數(shù)字濾波器
+關(guān)注
關(guān)注
4文章
273瀏覽量
47529
發(fā)布評論請先 登錄
激光位移傳感器的測量范圍選擇
利用ldc1314測量金屬距離,偶然發(fā)現(xiàn)溫度對傳感器的影響很大,怎么處理?
傳感器的響應(yīng)時間對測量結(jié)果有何影響?

氣壓傳感器如何提高測量精度
AIC3254要怎么做才能夠做到反饋抑制呢?
點光譜共焦傳感器測量透明材質(zhì)應(yīng)用

液位傳感器怎么安裝和使用呢
什么原因?qū)е聣毫?b class='flag-5'>傳感器漂移?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論