 外圍設備連接到機械手方面的核心作用
外圍設備連接到機械手方面的核心作用

KUKA機器人INTERBUS相關文件的作用:
?用戶權限:專家模式。為了編輯機器人程序以外的文件
?選擇文件和編輯
?或者:通過按組合鍵切換到Windows
配置和驅動程序文件:
ISA和PCI卡:
?C: INIT IOSYS.INI:I / O系統的配置文件。
PCI卡:
?C: INIT IBSPCI1.INI:Interbus驅動程序的參數化文件
?C: DRIVERS IBPCIDRV.O:所有Interbus PCI卡的驅動程序
IOSYS.INI
由于其在將外圍設備連接到機械手方面的核心作用,因此I / O系統的此配置文件始終安裝在主分區上。
IBSPCI1.INI
文件IBSPCI1.INI位于控制器的Init目錄中。它包含Interbus PCI卡的參數化數據。
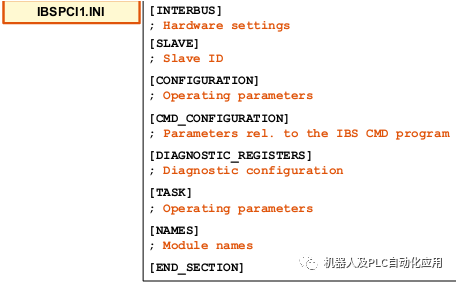
INTERBUS]這主要是用來通知驅動程序在控制器板上進行的硬件設置。
[SLAVE]該部分影響Interbus控制器板從屬部分的行為。
[CONFIGURATION]在此設置Interbus控制器板常規操作方法的各種參數。
[CMD_CONFIGURATION]此處,將Interbus卡設置為使用程序IBS CMD的任務。
[DIAGNOSTIC_REGISTERS]這些參數可以通過I / O系統的過程數據映像(無CMD配置)訪問卡的內部診斷寄存器。
[TASK]此部分可用于控制驅動程序的獨立性。
[NAMES]通過在此處為Interbus網段和模塊分配名稱,可以使您的系統更加用戶友好,例如,發生錯誤時,此處存儲的文本將顯示在GUI的消息窗口中。
硬件參數部分:
必須正確設置本節中的參數,才能使Interbus連接正常運行。插圖中指定的值對應于默認設置,該設置在系統出廠時由KUKA預裝時有效。一些參數控制了底層控制計算機的硬件接口的保留,而其他系統組件可能不會同時使用這些保留。
BOARDNUMBER = 1(必需)
板號用于為IBS卡分配明確的標識符。
控制器用來將自身標識為更高級別的Interbus主站的從站ID。
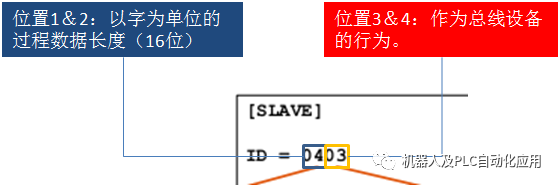
數值必須以十六進制形式輸入。例如:16個字的輸入和輸出:ID = 1003
ID = LLTT(可選,對于PCP流量是必需的)
ID的指定值由兩部分組成,它們被解釋為十六進制數。前兩個位置以字s表示過程數據長度,控制板用來與高層Interbus交換過程數據。
LL = { 01, 。.., 10 }
最后兩個位置描述了卡如何充當總線設備,以及卡支持PCP通信的數據寬度。
TT:
03:帶數字量輸入和輸出的系統耦合器
E8:帶有2個PCP字的系統耦合器
E9:帶有4個PCP字的系統耦合器
EB:帶有一個PCP字的系統耦合器
如果存在此參數,則此信息將始終覆蓋Interbus卡上的DIP開關的設置。從站ID只能設置一次。為了將從站ID重新分配給控制器板,必須中斷從站連接的電源。
IBSPCI1.INI文件解讀:
SLAVERING 從動
= 1(默認)=》初始化從站并生成錯誤消息。
= 0 =》從設備未初始化,并且不會生成任何錯誤消息。
SWAP_SLAVE_BYTES
選項SWAP_SLAVE_BYTES可用于指定驅動程序自動交換(從設備的)字節。
CONTINUE_BY_ERR
如果此標志設置為0,則在從屬環發生故障時,將禁用驅動器的讀寫功能。直到消除了從屬環中的故障后,才能再次啟用讀取和寫入功能。
MASTER_TO_SLAVE_OK
INI文件中的該條目可用于在高層環網中提供位,以指示控制器中的Interbus驅動程序仍處于“正在運行”狀態。只要驅動程序處于“ 正在運行”狀態,如果發生故障或尚未開始,則將其重置。這樣就無法再從控制器設置或重置該位。IN I文件中的條目解釋如下:
0 =》未設置位
1-n =》從站的起始地址之后,在從站的I / O輸出存儲器中的位位置。
重新啟動或熱啟動之后,直到寫入輸出數據后,該位置位。
WATCHDOG = 0 。.. 7(可選a7}(可選)
= 0(默認)=》卡上的看門狗未激活。
》 0 =》卡上的看門狗已激活。每次讀取數據都會觸發卡上的看門狗。如果未在指定時間內觸發看門狗,則IBS停止,并且在GUI上顯示相應的錯誤消息。指定的值根據。
以下列表:
(7 = 16.4毫秒,6 = 32.8毫秒,5 = 65.5毫秒,4 = 131.1毫秒,3 = 262.1毫秒,2 = 524.3毫秒,1 = 1048.6毫秒。)
僅當在IOSYS.INI中還配置了輸入時,才激活看門狗,因為僅在“讀取”功能中觸發了看門狗,并且僅在還配置了輸入時才調用“讀取”功能。
MASTERRING = 0、1(可選)
此參數通知駕駛員是否要激活(1)Interbus卡的主連接(0)。
LOGFILE = logibuspci.log (例)
日志文件的名稱。指定日志文件名將激活日志記錄功能。可以指定名稱及其路徑(相對于KRC目錄)。默認設置為無名稱且無日志記錄。
CONTINUE_WITH WARNING = {0,1}(可選)
如果將此參數設置為1,則在發生總線故障時,驅動程序將繼續處理。如果值為0,則驅動程序的行為與總線錯誤相同,即它會停止過程數據通信。
PASSIVE_UPDATE = {0,1}(可選)
在主環中發生總線故障時,驅動程序的輸入映像將被凍結,這意味著控制器無法再將其狀態發送給從屬環中的更高級別的主控制器。如果將此參數設置為1,驅動程序將繼續讀取輸入。
SWAP_MASTER_BYTES
該條目可用于指定要交換(主模塊中的模塊的)字節
由駕駛員自動執行。但是,對于數字模塊,驅動程序僅執行此交換。
沒有交換模擬模塊。
= 0(默認),禁用交換。
= 1交換激活。
RESET 重啟
為了在系統啟動時將控制板設置為定義的狀態,可以在初始化控制板之前執行復位。
= 0當IBS驅動程序啟動時,不執行任何復位。
= 1(默認值)當驅動程序啟動時執行復位;系統最多等待15秒鐘,以進行復位并讓控制器再次運行。如果在這15秒鐘內無法對控制板進行尋址,則驅動程序的啟動將中止。
= 2-n在這里,與設置1一樣,將進行復位,并且系統將等待指定的秒數。如果在指定的時間后無法對控制板進行尋址,則驅動程序的啟動將中止。
CHECKLEVEL
= 0(默認)=》不檢查配置。
= 1 =》將為主機配置的I / O位的數量與實際存在的模塊進行比較;在不準確的情況下,驅動程序的加載將中止。此處考慮了INACCURACY下的規范。
INACCURACY不準確
配置檢查的準確性(即,IOSYS.INI中可配置的位數比連接到IBS的位數多)。
默認設置為0。
BAUDRATE = {1200、2400、4800、9600}(可選)
您可以使用這些參數設置Interbus卡上串行接口的傳輸速率。僅當在KRC的PC上操作了CMD軟件時,才需要設置1200波特(請參見“ CMD”一章)。
CMD_FILE =項目文件路徑(邏輯尋址所必需)
此參數用于告訴驅動程序要加載哪個Interbus項目文件。在通過IBS CMD程序配置了總線結構之后,您可以將該Interbus項目保存為一種特殊的文件格式,該格式可以由Interbus卡評估。這些文件以.SVC結尾。參數CMD_FILE只能與具有邏輯Interbus尋址的I / O配置一起使用。
EXTERN_START={ 0, 1 } (optional)
如果EXTERN_START為1,則驅動程序希望將引導項目保存在Interbus卡上。否則,EXTERN_START必須設置為0。
STATUS =字節偏移量(可選)
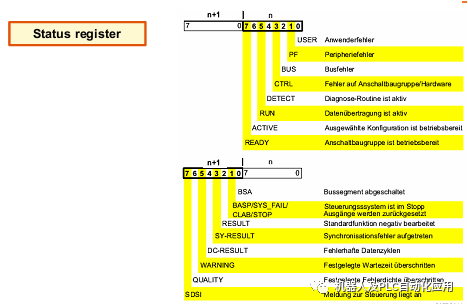
這將導致Interbus控制器板的I / O映射中的位置保留給狀態字。可以通過IOSYS.INI中的分配使狀態字可被控制器訪問。
PARAMETER =字節偏移量(可選)
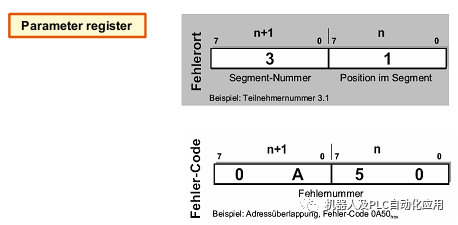
這將使Interbus控制器板的I / O映射中的位置保留給參數字。可以通過IOSYS.INI中的分配使參數字可供控制器訪問。參數寄存器內容的含義取決于當前活動的狀態位。
PARAMETER2=Byte offset
這將導致Interbus控制器板的I / O映射中的位置保留給Interbus卡的第二個參數字。可以通過IOSYS.INI中的分配使該附加參數字可供控制器訪問。
AUTORESTART =時間(可選)
“任務”部分的參數接收總線故障后驅動程序在等待自動嘗試重新啟動之前等待的時間(以秒為單位)。值為零(0)時,驅動器不會進行任何自動重啟嘗試。
NIndex= Seg.Mod:Name(可選)
這里的“索引”是一個序號》 = 1。條目Seg指定段號,Mod表示總線設備的位置。在冒號之后輸入Interbus模塊的名稱(最多18個字符)。
責任編輯:pj
-
控制器
+關注
關注
114文章
17052瀏覽量
183584 -
機器人
+關注
關注
213文章
29623瀏覽量
212212 -
驅動程序
+關注
關注
19文章
861瀏覽量
48984
發布評論請先 登錄


桁架機械手直線模組滑臺 五大核心技術打造無人車間新標桿
profinet轉ethercat網關的自動上料機械手集成案例

LC電路的核心作用解析:從諧振原理到工程應用
案例分析,搬運機械手如何選擇電機?



AI視角下的ZR機械手市場:速程精密科技獨占鰲頭
機械手末端快換技術:工業自動化的強大新動力
機械手 OEM 的應用
明治案例 | 【BGS背景抑制】【大光斑】機械手吸取網布有無檢測

“快、準、穩”——阿普奇AK5在機械手領域的應用解決方案







 工商網監
工商網監
評論