") KUKA電伺服焊鉗測量原理分析
KUKA電伺服焊鉗測量原理分析

user測量程序:
Geometrie:
初始化
在以下情況下必須完成:
?啟動時
?每次更換電極后
使用在WorkVisual下的初始化力新上限下配置的力。
nachFraesen:
循環(huán)初始化
?循環(huán)初始化必須在瓶蓋銑削之后進行,使用在WorkVisual中在初始化力蓋下配置的力。

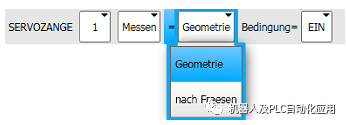
焊鉗測量USER程序:
P1 =選擇鉗子(鉗子編號)
P2 =技術(shù)選擇(測量)
P3 =方法-幾何/銑削后
P4 =條件-執(zhí)行命令的條件
例如:
SERVOZANGE 1 Messen= nach Fraesen Bedingung=EIN 測量
VW_SGB_INIT_ADV(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(Condition:IN, MovementType :IN, PointCoord :IN,GunNumber :IN,InitType :IN)
Condition:TRUE條件
MovementType:SG_PTP運動類型
PointCoord:P8 工作點號
GunNumber:1 槍號
InitType: #SAME/#NEW 測量類型:#SAME銑削后測量,#NEW更換電極測量

1.SGL_CalcWear 測量損耗
-
伺服
+關(guān)注
關(guān)注
16文章
669瀏覽量
41821 -
測量
+關(guān)注
關(guān)注
10文章
5240瀏覽量
113467 -
KUKA
+關(guān)注
關(guān)注
3文章
218瀏覽量
16984
原文標(biāo)題:KUKA電伺服焊鉗測量原理分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
伺服電機測試流程分析
庫卡KUKA機器人常見故障維修
安捷倫4294A阻抗分析儀測量描述

是德頻譜分析儀的振動對測量的干擾

佰力博FEAI1000系列高精度鐵電分析儀-自主研發(fā),測量精度高。

其利天下技術(shù)·引起伺服電機故障的原因分析·伺服電機驅(qū)動方案開發(fā)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論