 Linux設備與驅動的手動解綁與手動綁定
Linux設備與驅動的手動解綁與手動綁定

眾所周知,Linux靠設備與驅動之間的match,來完成設備與驅動的bind,從而觸發驅動的probe()成員函數被執行。每個bus都有相應的match方法,完成match的總的入口函數是:
static inline int driver_match_device(struct device_driver *drv, struct device *dev){ return drv->bus->match ? drv->bus->match(dev, drv) : 1;}
而這個總的入口函數又會調用到各自不同總線的match函數,對于platform bus而言,它的match函數就是platform_match()
static int platform_match(struct device *dev, struct device_driver *drv){ struct platform_device *pdev = to_platform_device(dev); struct platform_driver *pdrv = to_platform_driver(drv); /* When driver_override is set, only bind to the matching driver */ if (pdev->driver_override) return !strcmp(pdev->driver_override, drv->name); /* Attempt an OF style match first */ if (of_driver_match_device(dev, drv)) return 1; /* Then try ACPI style match */ if (acpi_driver_match_device(dev, drv)) return 1; /* Then try to match against the id table */ if (pdrv->id_table) return platform_match_id(pdrv->id_table, pdev) != NULL; /* fall-back to driver name match */ return (strcmp(pdev->name, drv->name) == 0);}
從代碼可以看出,platform的driver和device之間的match有很多方法成立,比如設備的name和驅動的name相同:
strcmp(pdev->name, drv->name) == 0
比如,設備的名字出現在驅動的ID表中:
if (pdrv->id_table) return platform_match_id(pdrv->id_table, pdev) != NULL;
比如device tree里面的compatible字段與驅動的dt兼容性字段匹配:
if (of_driver_match_device(dev, drv)) return 1;
只要符合其中任意一種,driver和device都可以匹配上。
這種自動匹配非常簡單,實施起來也非常容易。
但是有時候,這種自動匹配并不一定是我們想要的。比如我們有時候就是希望XXX設備用YYY驅動,而不是用XXX驅動。工程中有手動匹配的需求,最典型的場景是VFIO的場景,想讓設備與內核空間原本綁定的驅動解綁,轉而采用內核空間的通用VFIO驅動,而VFIO驅動又提供了userspace駕馭設備的能力。
下面我們來從原理和實踐上演示這種手動的unbind和bind是怎么進行的。在《Linux設備驅動開發詳解》一書中,我們給出了一個簡單的globalfifo設備和globalfifo驅動:
globalfifo-dev.ko(增加platform_device的模塊):
static int __init globalfifodev_init(void){ int ret; globalfifo_pdev=platform_device_alloc("globalfifo",-1); ret = platform_device_add(globalfifo_pdev);... return 0; }module_init(globalfifodev_init);
globalfifo.ko(增加platform_driver的模塊):
static struct platform_driver globalfifo_driver = { .driver = { .name = "globalfifo", .owner = THIS_MODULE, }, .probe = globalfifo_probe, .remove = globalfifo_remove,}; module_platform_driver(globalfifo_driver);
由于其中的platform_driver和platform_device的name都是“globalfifo”,符合此行的匹配規則:
strcmp(pdev->name, drv->name) == 0
設備和驅動匹配成功,從sysfs也可以看出:
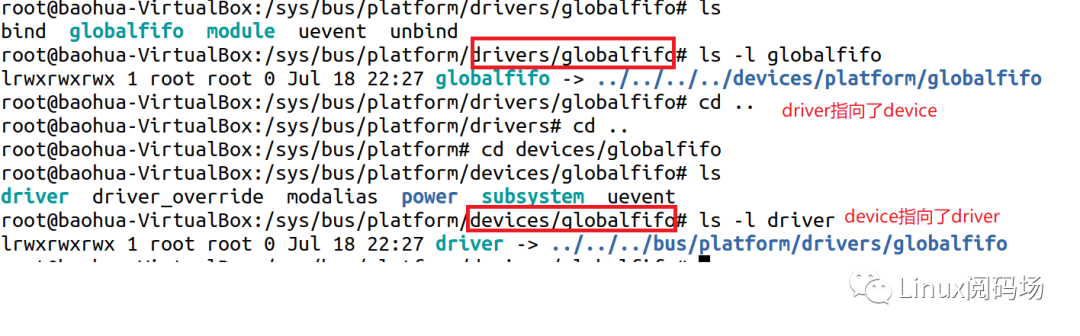
globalfifo的device和driver各自找到了對方。
現在我們來寫一個第三者driver,名字叫做globalxxx,然后我們想把globalfifo device的driver指向globalxxx。因此我們要完成2步:
unbind:解除globalfifo driver與globalfifo device的綁定
bind: 進行globalxxxdriver與globalfifo device的綁定
第三者globalxxx驅動代碼類似:
globalxxx.ko(增加platform_driver的模塊):
static struct platform_driver globalxxx_driver = { .driver = { .name = "globalxxx", .owner = THIS_MODULE, }, .probe = globalxxx_probe, .remove = globalxxx_remove,}; module_platform_driver(globalxxx_driver);
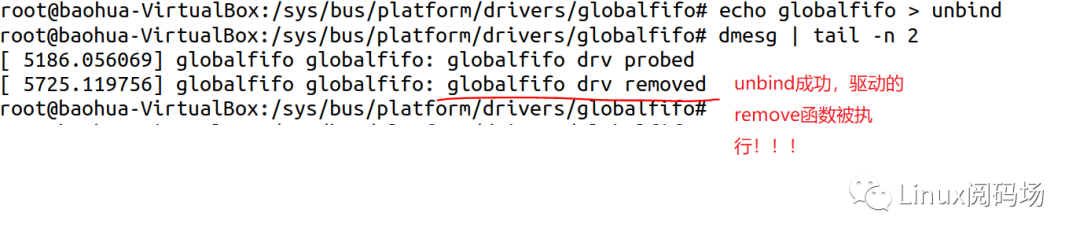
下面我們來完成第一步的unbind,這一步很簡單,跑到/sys/bus/platform/drivers/globalfifo目錄,把設備globalfifo的名字寫進去unbind文件:
當然我們也可以來回折騰著unbind,bind著玩:

這樣我們看到一堆的probe(每次設備和驅動bind成功,驅動probe都會執行),remove(每次設備和驅動unbind成功,驅動remove都會執行),最后處于unbind狀態。
現在我們來把globalfifo設備bind到globalxxx驅動:
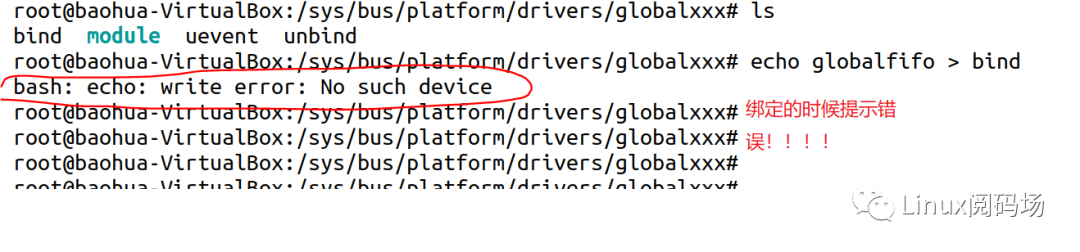
綁定的時候提示錯誤!
綁定的時候提示錯誤!!
綁定的時候提示錯誤!!!
前面我們用globalfifo的driver去bind globalfifo的device的時候,是想怎么綁就怎么綁的,想綁多少次就綁多少次的!為什么換了globalxxx來綁就不行了呢?
愛情不是你想賣想買就能賣
讓我掙開 讓我明白
放手你的愛
我們來看看這個bind sysfs入口工作的函數bind_store():
static ssize_t bind_store(struct device_driver *drv, const char *buf, size_t count){ ... dev = bus_find_device_by_name(bus, NULL, buf); if (dev && dev->driver == NULL && driver_match_device(drv, dev)) { err = device_driver_attach(drv, dev); if (err > 0) { /* success */ err = count; } else if (err == 0) { /* driver didn't accept device */ err = -ENODEV; } } ...}
看起來,如果要強行bind,仍然需要device_driver_attach()成立,否則內核會返回-ENODEV錯誤:
} else if (err == 0) { /* driver didn't accept device */ err = -ENODEV; }
根據前文對platform_match()的代碼分析,globalxxx driver和globalfifo device確實八竿子都打不著!!沒有任何匹配因子。
下面我們來把globalxxx的代碼稍微改一下,通過ID表來增加一個匹配因子:
static const struct platform_device_id globalxxx_ids[] = { { .name = "globalfifo", }, {}};MODULE_DEVICE_TABLE(platform, globalxxx_ids); static struct platform_driver globalxxx_driver = { .driver = { .name = "globalxxx", .owner = THIS_MODULE, }, .id_table = globalxxx_ids, .probe = globalxxx_probe, .remove = globalxxx_remove,}; module_platform_driver(globalxxx_driver);
rmmod和insmod globalxxx.ko
然后重新bind:
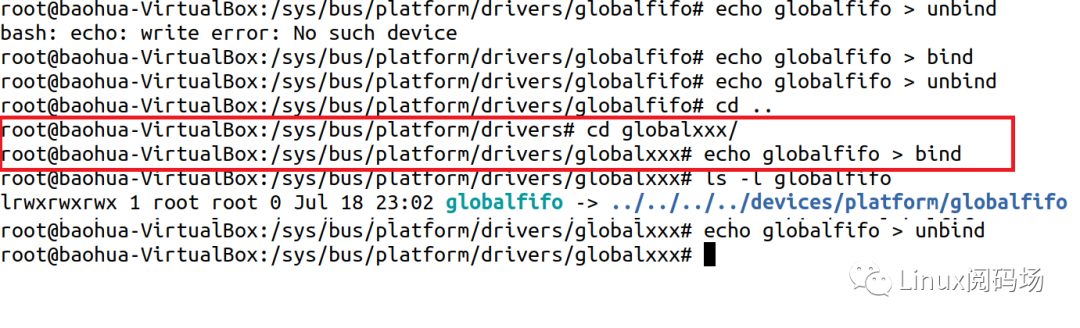
現在globalfifo device可以在globalxxx和globalfifo這2個driver里面進行自由地bind和unbind!
看到這里,客官們一定覺得這太特么狗血了!不是說可以自由地綁定第三者嗎?為嘛還要求這個第三者驅動與這個原先的設備匹配呢?這有嘛意思呢?
別忘了,在platform_match中還有這么一行:
if (pdev->driver_override) return !strcmp(pdev->driver_override, drv->name);
設備完全可以自由地宣布她喜歡的第三者driver,哪怕這個第三者driver和她本身完全沒有任何的匹配因子,操作的入口就是driver_override sysfs文件。
我們完全可以保留globalxxx驅動的原樣
static struct platform_driver globalxxx_driver = { .driver = { .name = "globalxxx", .owner = THIS_MODULE, }, .probe = globalxxx_probe, .remove = globalxxx_remove,};
不去增加任何的id_table,而換做到globalfifo device里面去寫driver_override文件,宣布globalxxx driver可以匹配globalfifo device。

這樣之后,哪怕globalxxx driver和globalfifo device八竿子打不著,也是可以驅動globalfifo device的。工程里面如果我們想用VFIO的方式來驅動一個設備,就可以這樣做:
echo vfio-platform > driver_override
-
驅動
+關注
關注
12文章
1918瀏覽量
86930 -
Linux
+關注
關注
87文章
11511瀏覽量
213790 -
函數
+關注
關注
3文章
4381瀏覽量
64865
原文標題:宋寶華:Linux設備與驅動的手動解綁與手動綁定
文章出處:【微信號:LinuxDev,微信公眾號:Linux閱碼場】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
API讓電商“飛”起來,告別手動操作

季豐電子推出低高溫手動探針臺設備
Princetel 推出新的手動電纜卷筒在線配置器
手動檢測的終結者:機器人氣密性測試設備來襲

告別手動時代:揭秘蔡司探針清潔的智能革命

RobotStudio 6.08的手動操作方法

ADS8332在手動觸發、手動通道選擇情況下,它的SDI是如何進行指令的?
告別手動打壓,這款壓力源更高效!

linux驅動程序的編譯方法有哪兩種
延時開關改手動開關怎么接線
萬能式斷路器怎么手動合閘
TE Connectivity高級手動工具解決方案






 工商網監
工商網監
評論