 什么是相機標定?常用的相機標定方法
什么是相機標定?常用的相機標定方法
無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確與穩定。
什么是相機標定?
在圖像測量過程以及機器視覺應用中,為確定空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系,必須建立相機成像的幾何模型,這些幾何模型參數就是相機參數。
在大多數條件下這些參數必須通過實驗與計算才能得到,這個求解參數的過程就稱之為相機標定。
計算機視覺的基本任務之一是依據相機獲取的圖像信息計算三維空間中物體的幾何信息,并由此重建和識別物體。我們用簡單的數學模型來表達復雜的成像過程,并且求出成像的反過程。標定之后的雙目相機,可以進行三維場景的重建,這是計算機視覺的一大分支。
經典的針孔相機模型
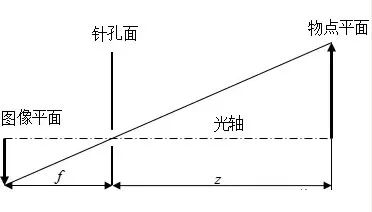
小孔成像的實驗大家都很熟悉,如上圖,依據這個實驗也可以抽象出一個經典的針孔相機模型,如下圖:
相機標定常用到四種坐標系,分別為:
●像素坐標系(u,v):描述物體成像后的像點在數字圖像上(相片)的坐標,單位為個(像素數目)。
●成像平面坐標系(x,y):描述成像過程中物體從相機坐標系到圖像坐標系的投影透射關系,單位為m。
●相機坐標系(xc,yc, zc):原點落在相機上的三維坐標系,單位為m。
●世界坐標系(xw,yw, zw):用戶定義的三維世界的坐標系,為了描述目標物在真實世界里的位置而被引入,單位為m。
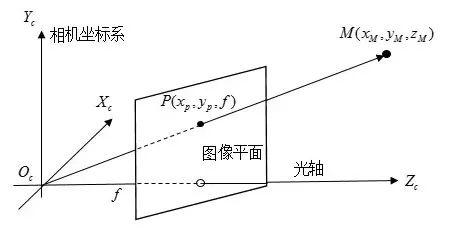
世界坐標系到相機坐標系的轉換關系今天暫不討論,我們把重點放在相機坐標系到成像平面坐標系的轉換關系上。
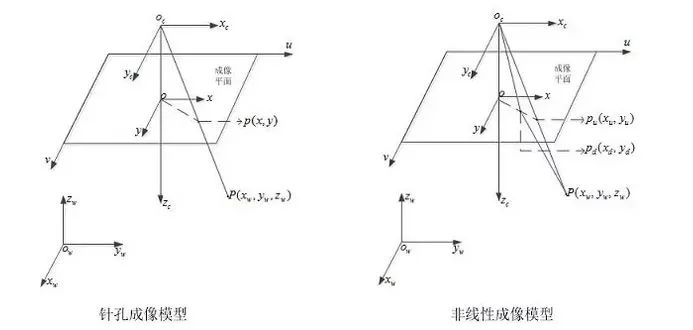
上文中小孔成像實驗的成像過程可以描述為一點通過針孔相機模型的示意圖(如圖A)。為了在數學上更方便描述,我們將相機坐標系和圖像坐標系位置對調,變成圖B所示的布置方式:
圖A
圖B
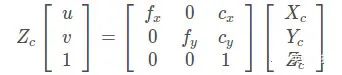
經過一系列推導,我們就可以得到一個結果轉化公式:
透鏡的畸變
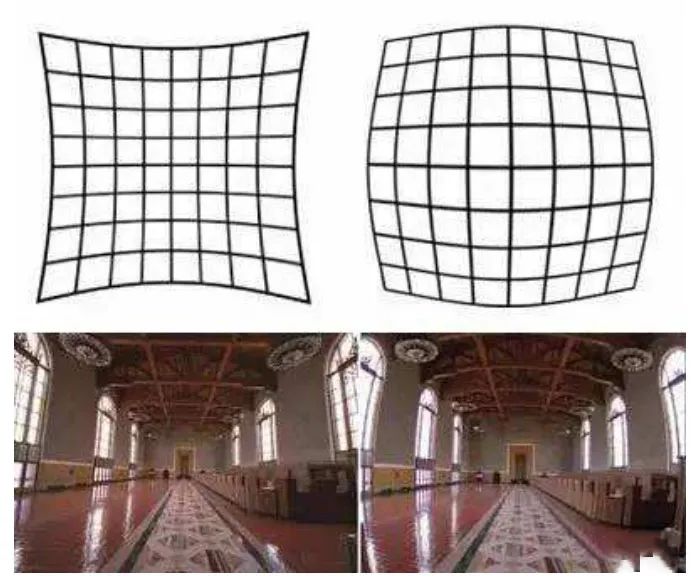
透鏡的畸變主要分為徑向畸變和切向畸變:
徑向畸變就是沿著透鏡半徑方向分布的畸變,產生原因是光線在遠離透鏡中心的地方比靠近中心的地方更加彎曲,徑向畸變主要包括桶形畸變和枕形畸變兩種。以下分別是枕形和桶形畸變示意圖。
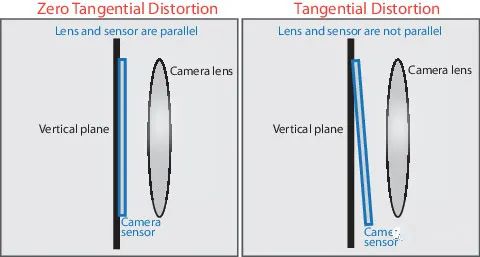
切向畸變是由于透鏡本身與圖像平面不平行而產生的,這種情況多是由于透鏡被粘貼到鏡頭模組上的安裝偏差導致。
常用的相機標定方法
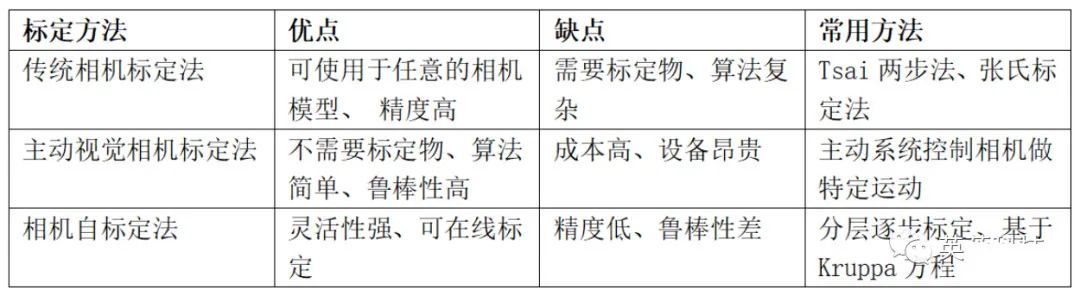
常用的相機標定方法有:傳統相機標定法、主動視覺相機標定方法、相機自標定法。
●傳統相機標定法
傳統相機標定法需要使用尺寸已知的標定物,通過建立標定物上坐標已知的點與其圖像點之間的對應,利用一定的算法獲得相機模型的內外參數。根據標定物的不同可分為三維標定物和平面型標定物。傳統相機標定法在標定過程中始終需要標定物,且標定物的制作精度會影響標定結果。
●主動視覺相機標定法
基于主動視覺的相機標定法是指已知相機的某些運動信息對相機進行標定。該方法不需要標定物,但需要控制相機做某些特殊運動,利用這種運動的特殊性可以計算出相機內部參數。基于主動視覺的相機標定法的優點是算法簡單,往往能夠獲得線性解,故魯棒性較高,缺點是系統的成本高、實驗設備昂貴、實驗條件要求高,而且不適合于運動參數未知或無法控制的場合。
●相機自標定法
相機自標定算法主要是利用場景中的一些平行或者正交的信息。其中空間平行線在相機圖像平面上的交點被稱為消失點,它是射影幾何中一個非常重要的特征,所以很多學者研究了基于消失點的相機自標定方法。自標定方法靈活性強,可對相機進行在線定標。但由于它是基于絕對二次曲線或曲面的方法,其算法魯棒性差。
-
相機
+關注
關注
4文章
1435瀏覽量
54491 -
機器視覺
+關注
關注
163文章
4514瀏覽量
122311 -
計算機視覺
+關注
關注
9文章
1706瀏覽量
46580
原文標題:如何保證工業相機工作的精準與穩定?
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
《聊一聊ZXDoc》之汽車標定、臺架標定、三高標定

采用LifeCam運行TIDA-00361_LCr3000程序進行到投影儀標定步驟,如何使LifeCam Cinema相機捕捉到投影儀投射的棋盤格圖像?
TIDEP0076相機無法正常調用怎么解決?
DLP_LightCrafter_4500_3D_Scan_Application軟件進行相機和投影儀標定時,進入相機拍照界面后程序未響應然后退出怎么解決?
TIDA-00254使用SDK進行物體點云重建時在系統標定時DLP不打光,怎么解決?
肇觀電子首發自標定3D深度相機

傳感器靜態標定的主要步驟是什么
使用基于模型的標定提高開發效率
基于CW32的儀表精度測量實現(三):標定與校準

工業相機測長儀的組成部分
技術指南丨深視智能3D相機上下對射測厚操作流程







 工商網監
工商網監
評論