 一種能夠將電能轉換為機械能系統的電驅動器技術解析
一種能夠將電能轉換為機械能系統的電驅動器技術解析

作者:Maurizio Di Paolo Emilio
機器和設備的自主移動一直是人類的夢想。過去的夢想實現了,這要歸功于對機械充滿熱情的天才機械的發現和發明。當然,今天的技術允許在宏觀力學和微觀力學領域中使用高度復雜的驅動器。這些驅動器廣泛用于工業和民用應用中(見圖1)。它們涉及一個稱為執行器的動力機構,該動力機構能夠產生受其他機械或電子設備控制的機械功。為了確保高質量的工作,必須配備高質量的電動機驅動器。一些解決方案包括使用集電電動機,異步電動機,同步電動機,步進電動機和磁阻電機。它們各自具有特定的特性,具體取決于系統本身執行的目的。自動化領域還包括運動控制,它以受控方式研究機器運動部件中涉及的子系統。在開環系統中,控制器通過放大器將命令發送到電動機,但它不會意識到運動。但是,在閉環系統中,控制器會收到有關系統測量值的答案,以進行更正并補償任何錯誤。
電動起子
它是由電動機,電源電路以及命令和控制電路組成的系統,用于調節軸的扭矩,速度或位置。
驅動器可以具有不可調節的速度和可調節的速度。前者利用了發動機的固有特性。后者允許對能源及其完成的工作進行明智和經濟的管理。速度變化以不同的方式發生。
運動控制
它沒有描述特定的機械或電子組件,而是代表一組單獨的組件,它們一起工作以在機器或系統中產生受控的運動。”
關鍵組件通常包括:
- 運動控制器;
- 具有放大能量目的的驅動器;
執行器
控制器是在控制系統中充當“大腦”的電子設備。所用控制器的數量根據需要控制的各個過程的數量而有所不同。對于復雜的系統,可能會有許多控制器。這些控制器中的每一個都可以向電動機發送命令,并同時從執行器本身接收指令。驅動器充當控制器和電機之間的中介。它解釋來自控制器的信號,并提供正確的功率水平以轉發給電動機,以獲得所需的運動。運動控制系統中使用的電動機可以采用多種形式,并可以用于各種應用。它們的主要功能是接收電輸入并將其轉換為機械運動。
執行器
運動控制的最終目標是對執行器執行物理動作,該動作將按照應用程序要求的術語和方式進行重現(參見圖2)。無需深入探討該主題,可以通過以下方式執行驅動器:
- 步進電動機,其工作方式與普通電動機類似。磁鐵的內部布置使軸可以單步旋轉。例如,步進電機的完整匝數可分為1個度數的360個步數。這樣,內軸的定位非常精確。
- 線性執行器,將旋轉運動轉換為線性運動;
- 伺服器,可精確控制角度運動。
智能驅動程序
當然,技術正在取得長足進步,并且該部門也受到了很大的影響。新的尖端,功能強大的產品可帶來旨在提高效率,尤其是安全性和舒適性的結果。新技術可以實現快速精確的定位,以及在智能系統網絡中同步的動態運動。另外,這些系統不是彼此獨立的,而是與其他組件通信,以允許在一般系統環境中進行信號處理和集成測量。如今,可以執行非常逼真的動作,從而使人機與人造機器之間實現了完美的互動。
效率
該測量表示電動機將電能轉換為機械能的效率。高效率對應于較低的電力消耗價格。
扭力
扭矩在選擇發動機時也起著決定性的作用。它比功率更重要,因為它表示發動機在所有轉速下都能保證的性能。
擺脫
浪涌電流是一個在任何領域都不能忽視的問題。當發動機啟動時(以及在涉及打開和關閉的任何過渡階段),電動機吸收的電流甚至比正常穩態電流大十倍。起點導致系統問題。實際上,有必要將電源線的尺寸和開關的尺寸設置為比正常操作所需的尺寸大得多的值。因此,有幾種方法可以嘗試減少此問題。例如,許多設備使用可變的阻抗和電阻,或者它們可以輕柔地啟動,然后逐漸增加工作條件。逆變器在能量分配中也起著非常重要的作用。
啟動引擎
要使電動機開始旋轉,啟動扭矩必須大于阻力扭矩。最初,當轉子停止并提供電壓時,它處于短路狀態,并且在最初的瞬間,它會吸收來自電源線的最大電流。
速度設定
自動化管理中最關鍵的方面之一是能夠不斷改變執行器產生的功的特性。如果一方面該操作看起來無害且簡單,另一方面卻極其微妙,系統的特性和響應就取決于此。在理想情況下,輸入能量(Ei)和輸出能量(Eu)相同。比率:Eu / Ei提供了效率水平。在理想情況下(零損耗),它等于1,但實際上這是無法做到的。
 表1:電路效率表
表1:電路效率表
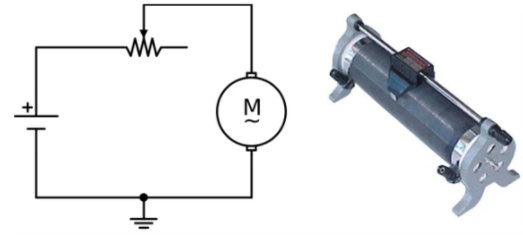
圖3:一種可以改變發動機速度的方式
它也可以表示為百分比。例如,假設以最自然的解決方案降低電動機的速度,即在線路上插入一個電阻元件以降低傳輸電流(請參見圖3)。該解決方案是最糟糕的解決方案之一,因為未使用的功耗非常大。
表格還以圖形方式顯示在圖4中,該表格顯示了與通過電流的障礙物質量有關的效率下降趨勢。必須說,通過使用變阻器,可以在降低發動機轉速時獲得非常低的扭矩。實際上,如果電阻值過大,則電動機也可能在重負載下停止,或者在初始負載過大時甚至無法啟動。
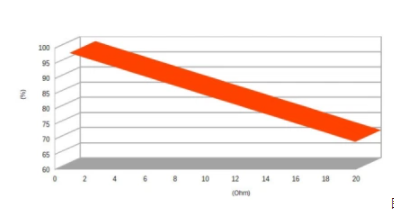
圖4:變阻器電路改變發動機轉速的效率圖
為了克服該問題,可以使用齒輪和減速器,以保持較高的電動機轉數和轉矩,并成比例地降低機械負載的速度。如果要在不影響系統強度的情況下降低轉速,則可以使用PWM控制器來改變電動機上的電壓。
實際上,大多數小型直流電動機都設計為以高轉速運行,因此,對于要求低轉速的應用,PWM通常是最佳選擇。
使用此技術可確保最大的轉矩脈沖,這使您可以在極低的速度下以很大的力來驅動電動機。PWM是一種通過快速打開和關閉電子設備的電源來生成可變電壓的方法(請參見圖5)。借助PWM,您可以設計用于優化電源的放大器或逆變器。在單個周期內,平均電壓取決于信號占空比,即取決于信號接通的時間量與信號斷開的時間量。開關解決方案是實現高能效功率放大的最佳解決方案之一,該功能可帶來高功率傳輸。
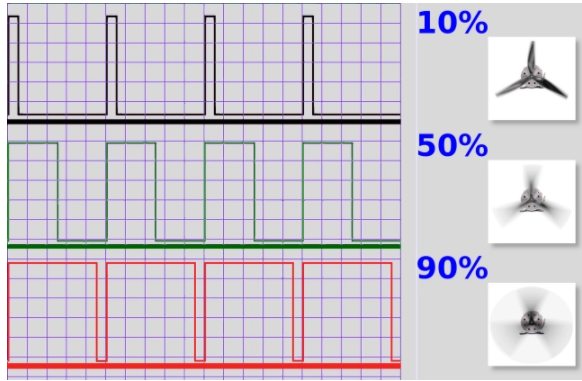
圖5:PWM如何工作
該技術的效率非常高,通過查看圖6的應用方案,可以了解各種系統之間的差異。讓我們研究四種不同的配置,其中有意使用50%的能量為負載供電:
- a)在此圖(左上)中,負載未受到脈沖串的作用,而是受到了等于電源一半的固定電壓的作用。得益于在線性區域工作的晶體管的極化,可以實現控制。散熱非常高,效率為49%;
- b)在第二個示意圖(右上方)中,晶體管的行為就像一個開關元件,由組件“基極”端子上的脈沖信號驅動。解決方案的效率非常高,大約為85%。
- c)第三個原理圖(左下)提供了使用普通功率MOSFET(IRF530)的條件。電路效率非常高,大約為97%;
- d)第四個原理圖(右下)使用一種新技術,即SiC Mosfet作為引導組件。效率非常高,超過99%。來自電源的幾乎所有能量都以非常低的損耗傳遞給負載。
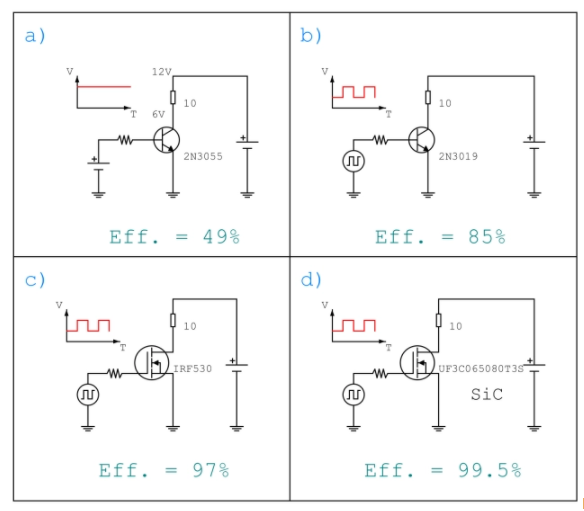
圖6:PWM使您可以非常高效地調整負載的功率
因此,PWM并不等同于向負載施加固定電壓。扭矩由平均電流確定。由于較小的線圈電感,小型電動機的效率在相對較低的PWM頻率下降低。當電感較小時,電流跟隨PWM信號,與電流相比增加了散熱。阻尼會降低扭矩,同時會產生更多的熱量。因此,較高的PWM頻率可提高效率。較大的電動機具有較高的電感,即使在較低的PWM頻率下,效率也更高。
驅動程序和動力控制
前面段落中的圖清楚地表明,無論使用哪種技術,都必須使用功率設備來控制電動機(任何類型)。驅動器必須提供高電流,這對于操作電動機以及采用正確的命令可編程性,速度或加速度是必需的。它們的設計必須具有很高的精度和魯棒性,因為它們也可以用于工業用途。因此,必須對它們進行電流保護,并用有源和無源散熱器進行冷卻。電路中使用的功率MOSFET必須至少能夠承受電源電壓和電機所需的最大電流。擁有大型Mosfets總是更好。還使用“預驅動器”電路,因為它們使用線性穩壓器,電荷泵和自舉電容器在內部生成柵極驅動電壓。高級微系統(AMS)CMAX-410的運動控制系統,在所示圖7。
圖7:Advanced Micro Systems CMAX-410運動控制系統
它提供了用于控制4 A步進電機運動的集成解決方案。它可以由用戶獨立編程,也可以由中央主機控制。它通過工業連接器發送電動機和控制信號。所有運動控制系統均提供可編程電流,保持電流,微步進模式,速度,加速度等。它是專門為減少電氣干擾和最大程度地提高安全性而設計的。已通過CE認證。
結論
旨在用于運動控制和驅動的系統的設計無疑是一件令人著迷且極為精致的事情。它涉及不同的研究和應用領域,例如物理,電子,電力等。世界上最好的公司的設計師每天都做出巨大的努力,以創建非常有效且尤其是安全的系統。
編輯:hfy
-
運動控制器
+關注
關注
2文章
450瀏覽量
25282 -
步進電動機
+關注
關注
0文章
60瀏覽量
13094 -
磁阻電機
+關注
關注
1文章
31瀏覽量
8572 -
同步電動機
+關注
關注
0文章
70瀏覽量
10055
發布評論請先 登錄





 工商網監
工商網監
評論