 基于STM32定時器捕獲測量脈寬的應用示例
基于STM32定時器捕獲測量脈寬的應用示例
我們知道,利用單片機定時器捕獲功能測量脈沖信號寬度及占空比是種很常見的做法。這里以STM32的定時器為例來介紹基于其捕獲功能實現對脈寬的測量的思路及過程。
一般來講,使用STM32定時器的捕獲功能來實現脈寬測量,我們可以選用一個通道、也可以使用兩個通道。使用1個通道時,只需使用定時器基本的輸入捕獲功能結合中斷或DMA即可實現;若使用兩個通道時可以將捕獲功能與定時器的從模式來相結合完成。這里就兩種方案的實現示例都做個簡單介紹。
不妨先介紹基于單個通道的輸入捕獲功能來實現對1路信號脈沖寬度及占空比的測量,并在測量過程中統計用于測量的定時器自身的溢出事件,以保障即使被測信號脈寬長于測量定時器自身的溢出周期時也能有效測量。
這里選用STM32F411 Nucleo 開發板 ,集成開發環境選用了ARM MDK IDE。
一、實現思路及步驟
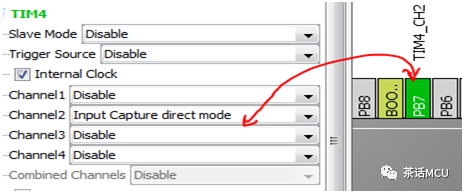
1.1、使用STM32F411Nucleo板的板載芯片內的TIM3的通道1產生一個周期為5s,占空比為40%的PWM輸出信號,然后將該信號連線到TIM4的定時器輸入通道2,通過它對來自于TIM3的PWM輸出信號進行脈寬及占空比的測量。
測量過程中,TIM4的通道2對外來信號的捕捉過程是這樣的,TIM4的通道2對外來信號的一個完整周期實現 3次捕捉。每次捕捉事件時計數器的值會被裝入CCR寄存器。
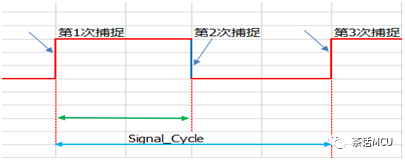
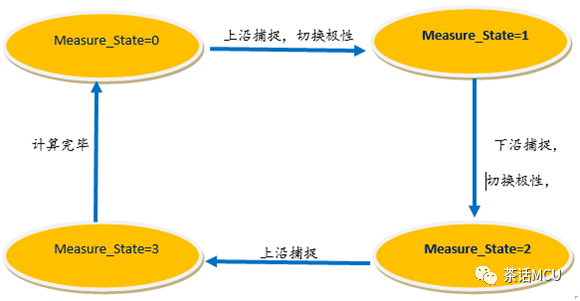
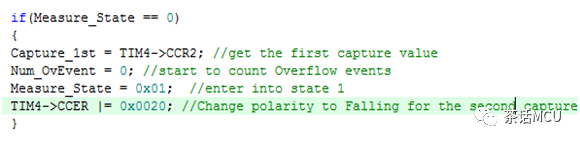
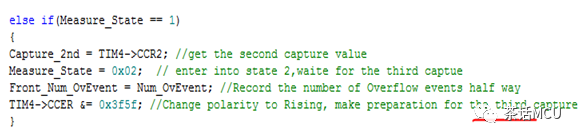
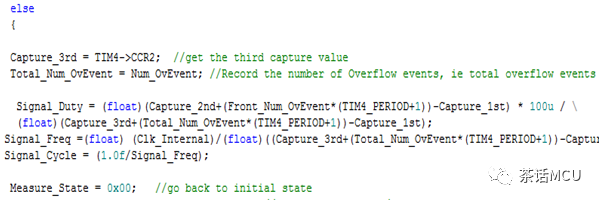
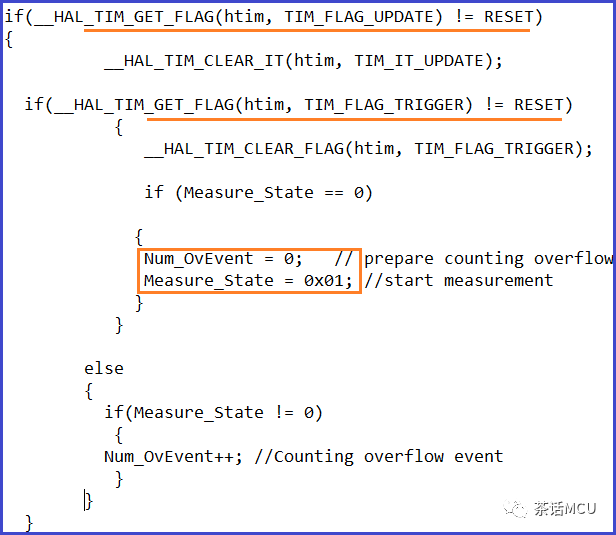
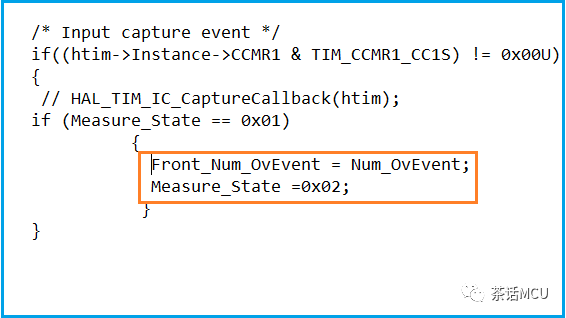
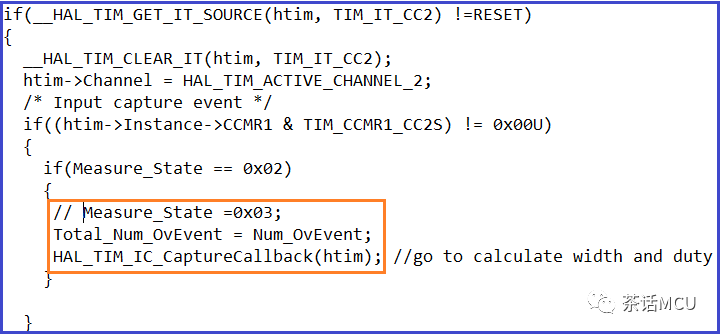
在初始狀態0基于上升沿發起第一次捕捉,記錄下第1次的捕捉值【Capture_1st】,并對TIM4定時器溢出事件計數器清零,同時將捕獲極性切換為下沿捕捉。之后進入狀態1,等待后續的下沿捕獲。當發生下沿捕獲時,記下第2次的捕捉值【Capture_2nd】,并將前面這段時間的定時器溢出次數也記錄下來【Front_Num_OvEvent】,再次將極性切換為上沿捕捉,進入狀態2,等待第3次捕獲。在狀態2的情況下,當發生上沿捕獲時,記錄下第3次的捕捉值【Capture_3rd】,并將整個測試周期內發生的定時器溢出次數記錄下來【Total_Num_OvEvent】,然后進入狀態3進行占空比【Signal_Duty】和脈寬【Signal_Cycle】的計算。完畢后回到初始狀態,準備下次的測量。
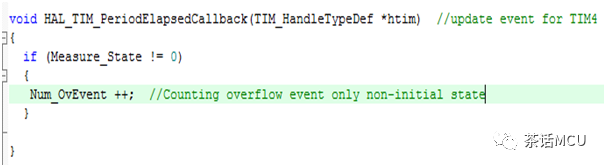
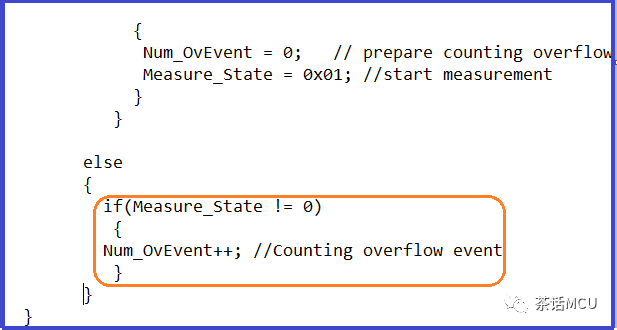
另外,在TIM4的更新中斷里對非初始狀態的溢出事件累加統計,放在變量【Num_OvEvent】里。
示例代碼里用到變量Measure_State來記錄和表示當前測試狀態。
1.2 、測量用到的算式
根據上面的介紹,一次完整的測量下來,測得的周期和占空比可以用下面算式求得。
【下面算式貌似復雜,只需把上面測試原理和那幾個數據理清自然就會計算】

1.3 、基本配置準備
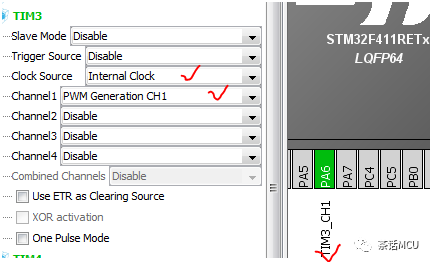
1.3.1、 實現TIM3 通道1【PA6】PWM輸出,計數周期5s,占空比40%,用做被測信號。
A、選擇定時器內部時鐘作為時鐘源,STM32F411芯片定時器內部時鐘為100Mhz;
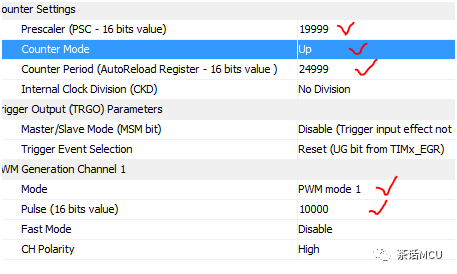
B、設置分頻比,選擇計數模式、設置計數脈沖個數;
對時鐘源20000分頻,PSC=20000-1;選擇向上計數模式up counting;
計數器基于分頻后的脈沖每計數設置為25000個后,發生溢出并產生更新事件及中斷。則:ARR=25000-1
按照上面參數來設計,定時器的定時周期或者說溢出周期就是5s.
C、它需做PWM輸出,這里選擇PWM 模式1,占空比為40%,
則CCR=(ARR+1)*0.40 =10,000
使用STM32CubeMx圖形化工具進行配置:
1.3.2、實現TIM4通道2的輸入捕獲,假定TIM4的溢出周期為20ms.
A、選擇定時器內部時鐘為時鐘源,32F411定時器內部時鐘為100Mhz;
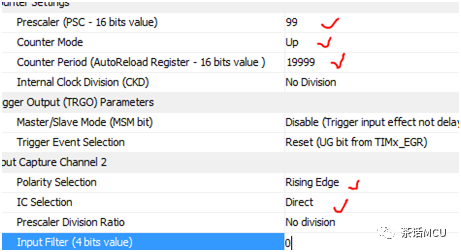
B、設置分頻比,選擇計數模式、設置計數脈沖個數;
先對時鐘源100分頻、即PSC=100-1;選擇向上計數模式up counting;
計數器基于分頻后的脈沖每計數20000個,發生溢出并產生更新事件及中斷。
則:ARR=20000-1
按照上面參數來設計,定時計數周期或者說溢出周期就是20ms.
另外,通道2配置為輸入捕捉,初始捕捉極性位選擇上升沿。
1.4 、工程代碼的生成、添加和整理
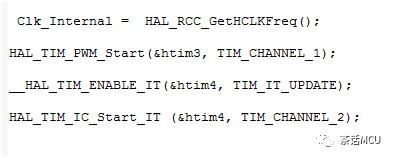
通過STM32CUBEMX依據上述參數完成配置,并開啟TIM4的中斷使能,然后生成工程。再在工程里添加應用戶代碼。
......
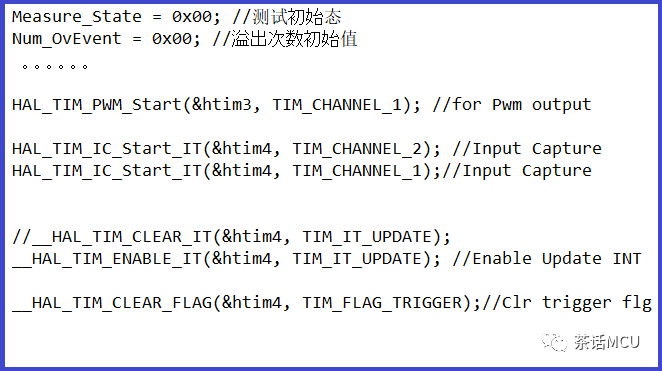
Measure_State= 0x00; //測試初始態
Num_OvEvent= 0x00;//TIM4溢出次數初始值
部分處理代碼的簡要說明:
在TIM4通道2的捕獲中斷里做3次捕捉值的獲取以及計算,在TIM4更新中斷里對溢出事件進行統計。
二、本次示例的結果驗證
實驗中tim4的時基參數保持不變,可通過調整TIM3的PWM輸出的脈寬和占空比,來看看實驗結果。下面有一個視頻剪輯,就是上面工程驗證結果的部分內容,有興趣可以觀看。
上面簡單介紹了基于單通道的定時器捕獲實現對脈寬及占空比測量的過程,現在繼續介紹使用雙通道,基于定時器PWM輸入模式測量脈寬及占空比。同樣,在測量過程中也統計用于測量的定時器自身的溢出事件。所用開發板和開發環境跟上面一致。
三、實現原理、思路及步驟
3.1、同樣,利用板載芯片內的TIM3的通道1產生一個周期為5s,占空比為40%的PWM輸出信號,然后將該信號連線到TIM4的定時器通道2【TI2】,作為其直接輸入。基于PWM輸入模式對來自于TIM3的PWM輸出信號進行脈寬及占空比的測量。
這里先簡單介紹下PWM輸入模式工作原理。
*它是基于輸入捕獲與定時器從模式相結合的一個具體應用。
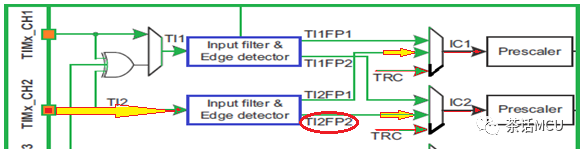
*同一外部輸入引腳【僅限于定時器的TI1/TI2】的輸入濾波信號【TIxFPx】映射到內部2個捕捉通道【僅限于IC1/IC2】,且配置為相反的捕捉極性,即一個通道捕捉上沿,另一通道捕捉下沿。
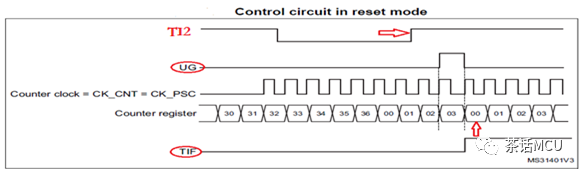
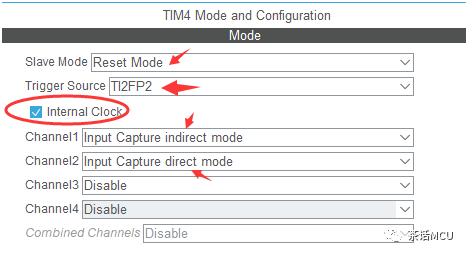
*用于測量的定時器配置在復位從模式,外部輸入信號的濾波信號TIxFPx作為定時器的觸發信號,令定時器復位。
*經過兩次連續的捕捉結合定時器的溢出事件統計可方便地測得信號的周期及占空比。
具體到這里,觸發信號來自待測信號,即TIM3的PWM輸出,與TIM4的TI2相連,經過邊沿檢測和濾波后的TI2FP2做為IC2的輸入信號的同時擔當TIM4的觸發輸入信號,其觸發極性可以軟件配置,此處配置為上沿觸發。當TIM4收到觸發信號時,定時器的計數器會被復位更新。當計數器配置為UP計數模式時,計數器會被清零并重新開始計數。
3.2、大致測量過程是這樣的:TIM4配置在復位從模式。待測信號從TI2輸入。
當從通道2出現信號的上升沿時,TIM4計數器被復位清零,同時產生更新事件和觸發事件,相關標志位會被硬件置1.
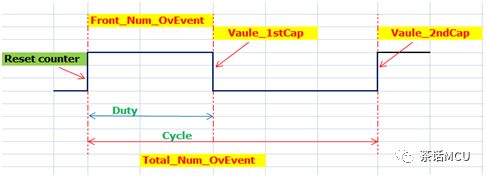
在初始狀態下,將定時器從模式觸發沿配置為上沿觸發,捕捉通道1配置下沿捕捉,捕捉通道2配置為上沿捕捉。初始狀態下,待測信號的上升沿使得TIM4的計數器被復位清零,并進入測量狀態1,并開啟定時器的溢出事件實時統計,代碼里用到的變量是Num_OvEvent。當發生通道1的下沿捕捉時,記錄下第1次的捕捉值【Vaule_1stCap】,并記錄下自復位以來到下沿捕捉這段事件的溢出次數,放在變量Front_Num_OvEvent里。然后進入狀態2。在狀態2的情況下當發生通道2的上沿捕獲時,記錄下第2次的捕捉值【Vaule_2ndCap】,并將整個測試周期內定時器溢出次數記錄在【Total_Num_OvEvent】,然后進入狀態3進行占空比【Signal_Duty】和脈寬【Signal_Cycle】的計算。完畢后回到初始狀態,準備下次的測量。
另外,在TIM4的更新中斷里對非初始狀態的溢出事件累加統計,放在變量【Num_OvEvent】里。
示例代碼里用到一個變量Measure_State來記錄和表示當前測試狀態,大致流程如下。
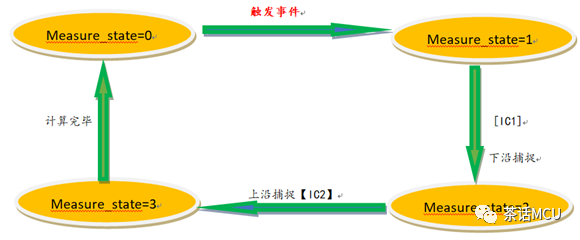
整個測量過程中,我們使用觸發脈沖產生的觸發事件作為每次開啟測量的起始。
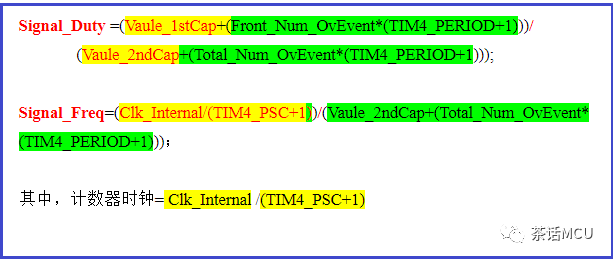
3.3、 測量用到的算式
根據上面的介紹,1次完整的測量下來,測得的周期和占空比可以用下面算式求得:
3.4、基本配置準備
3.4.1 、實現TIM3 通道1的PWM輸出,計數周期5s,占空比40%,用做被測信號。
A、選擇定時器內部時鐘作為時鐘源,STM32F411芯片定時器內部時鐘為100Mhz;
B、設置分頻比,選擇計數模式、設置計數脈沖個數;
對時鐘源20000分頻,PSC=20000-1;選擇向上計數模式up counting;
計數器基于分頻后的脈沖每計數25000個后,發生溢出并產生更新事件及中斷。則:ARR=25000-1
按照上面參數來設計,定時器的定時周期或者說溢出周期就是5s.
C、它需做PWM輸出,這里選擇PWM 模式1,占空比為40%,
則CCR=(ARR+1)*0.40 =10,000
CubeMx圖形化配置界面:
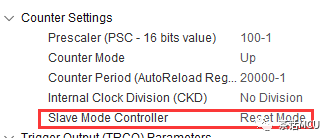
3.4.2、 實現TIM4通道2做PWM模式輸入測量,假定tim4計數器溢出周期為20ms。
先做時基參數的配置:
1、選擇定時器內部時鐘為時鐘源,32F411定時器內部時鐘為100Mhz;
2、設置分頻比,選擇計數模式、設置計數脈沖個數;
先對時鐘源100分頻、即PSC=100-1; 選擇向上計數模式up counting;
計數器基于分頻后的脈沖每計數20000個,發生溢出并產生更新事件及中斷。則:ARR=20000-1。注意:TIM4工作在復位從模式。
按照上面參數來設計,定時計數周期或者說溢出周期就是20ms.
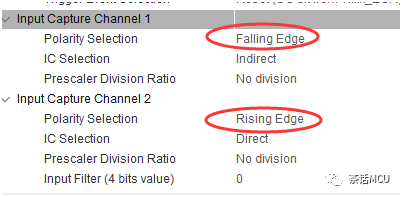
再看看定時器TIM4的捕獲配置:
TIM4輸入捕捉通道2配置為直接輸入捕捉,捕捉極性選擇上升沿。
TIM4輸入捕捉通道1配置為間接輸入捕捉,捕捉極性選擇為下降沿。
3.5、工程代碼的生成、添加和整理
通過STM32CUBEMX依據上述參數完成配置,并開啟TIM4的中斷使能,然后生成工程。再在工程里添加應用戶代碼。【只列出部分直接有關的】
部分處理代碼簡要說明:
發生觸發事件時,進入測量狀態:
在TIM4通道1發生下沿捕捉事件時,將前面時間段的溢出次數記錄下來并切換測量狀態。
在TIM4通道2發生上沿捕捉事件時,將整個測量周期發生的溢出次數記錄下來,并轉入計算處理狀態。
另外,在測量狀態下,基于TIM4的更新中斷對溢出次數進行統計。
四、實驗結果驗證
同樣,我們保持實驗中tim4的時基參數保持不變,通過調整TIM3的PWM輸出波形的脈寬和占空比,來看看實驗結果。
五、小結
上面介紹了兩種測量信號脈寬及占空比的方案,都用了捕獲中斷和更新中斷。其中,在第2種方案中用觸發事件作為每次測量的起始,這算是個關鍵點。順便說下,我們在利用定時器測量脈寬涉及到更新事件次數統計時,比較容易出現多統計一次的問題。因為定時器初始化完成后會軟件產生一次更新事件,所以建議在啟動定時器更新中斷前對該標志位做個清零操作。不過,在我上面兩個方案的示例代碼的初始化階段,這個操作倒是可有可無,因為我的代碼里對更新事件計數還要結合狀態機,并非一有更新中斷就累加。
上面提到的實現思路及代碼僅供參考,旨在拋磚引玉。當你對原理把握得越清晰時,應用就越靈活。最后,就上面提到的兩種測量方案基于個人的理解做個簡單比較。
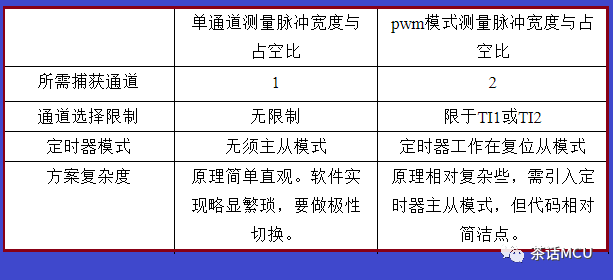
【注:2個通道并不意味著需要2個物理管腳,其實1個腳就夠了。另外基于定時器捕獲功能配合DMA,解碼方面也能有很好的發揮。】
原文標題:基于定時器捕獲測量脈寬的應用示例
文章出處:【微信公眾號:ST MCU 信息交流】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
單片機
+關注
關注
6065文章
44934瀏覽量
647665 -
STM32
+關注
關注
2290文章
11018瀏覽量
362731 -
定時器
+關注
關注
23文章
3289瀏覽量
117372
原文標題:基于定時器捕獲測量脈寬的應用示例
文章出處:【微信號:stmcu832,微信公眾號:茶話MCU】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
使用STM32捕獲PWM時同時捕獲2個通道時會出現捕獲的頻率值不準確,是什么原因導致的?
MCU定時器/計數器
使用STM32捕獲PWM時同時捕獲2個通道時會出現捕獲的頻率值不準確是什么原因導致的?
使用STM32捕獲PWM時同時捕獲2個通道時會出現捕獲的頻率值不準確的問題,是什么原因導致的?
使用STM32捕獲PWM時同時捕獲2個通道時會出現捕獲的頻率值不準,為什么?
STM32H723使用DMA方式實現定時器輸入捕獲只能執行一次嗎?
定時器是不是有編碼器輸入功能?
使用STM32F1輸入捕獲功能時,TIM6和TIM7無法實現輸入捕獲是哪里的問題?
STM32CUBEMX(5)--自定義紅外NEC解碼,定時器TIM捕獲方式
定時器的基本組成和工作模式
定時器的工作方式介紹
與定時器相關的寄存器有哪些類型
STM32G4系列芯片定時器的延時輸出問題






 工商網監
工商網監
評論