") VASS標準里的AAutoVR自動釋放設備
VASS標準里的AAutoVR自動釋放設備
通過AutoVR自動釋放設備
(VASS6里的設置)
一個部分始終包含連續(xù)的夾緊過程,而不會因機器人的動作而中斷。
在一個區(qū)域內(nèi),AutoVR必須確保在手動模式下打開一個夾具后,將它向R方向移動到足以使一個可以通過音序器根據(jù)順序再次夾緊的程度。
當打開上一部分的夾具時,這是不容易實現(xiàn)的,因為由于準備就緒消息,無法到達步驟鏈中的起點。
為了確保關(guān)閉在手動模式下打開的上一節(jié)的夾具,夾具必須再次關(guān)閉,并帶有節(jié)完成消息并且AutoVR = 1。但是,由于必須同時存在釋放V,因此必須在閥模塊上編寫用于步進釋放的并行路徑。
必須始終對AutoVR進行編程,使其不受電動運動(例如鼓位置)的影響。
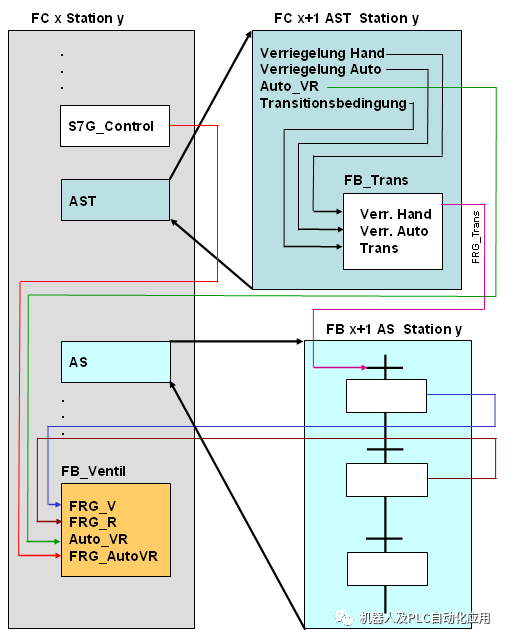
功能:
AutoVR的作用在于,在以下兩種情況下為順序控制提供有效的轉(zhuǎn)換條件:一是在手動操作模式下設備狀態(tài)發(fā)生手動更改時;二是切換到自動操作模式后無有效轉(zhuǎn)換條件時。
功能塊FB_Ventil(例如FB410)上的自動開啟(R)功能通過功能塊FB S7G_Control(FB 642)上的輸出端“FRGAutoVR”激活,并通過程序中AutoVR位內(nèi)存實現(xiàn)。此時,氣缸會嘗試進行同步,在此過程中,氣缸會一直保持收回狀態(tài),直到找到一個符合的轉(zhuǎn)換條件,之后順控器可在自動模式下繼續(xù)運行。
此外,該功能還可實現(xiàn)在取消選擇POT的情況下將設備再次控制到收回狀態(tài),即在取消選擇POT的情況下,F(xiàn)RGAutoVR也同樣會激活,氣缸將通過AutoVR-位內(nèi)存的狀態(tài)再次調(diào)控到R的狀態(tài)。
AutoVR功能只用于夾緊技術(shù),即適用于所有的閥。但電極式氣缸不采用AutoVR進行控制。這種情況下,須在功能塊FB Ventil (例如FB410)上設定配置位( Configurationsbit ) Cfg.X5 1) 或 X6 1) ; // 1= 不受控制“NOT AutoVR“。
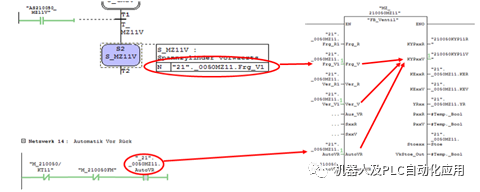
若 FRGAutoVR=1 且 AutoVR =1 且 Ver_V=1 且 Frg_V=1 則 夾頭運動至V位
若 FRGAutoVR=1 且 AutoVR =0 且 Ver_R=1 則 夾頭運動至R位
AutoVR功能僅用于夾緊技術(shù),即 所有使用的閥門. 這不適用于電極圓柱體,這些電極圓柱體未連接到AutoVR。在這種情況下,配置位為Cfg.X5或X6;// 1 =在沒有控制的情況下參數(shù)化“ NOT AutoVR”。
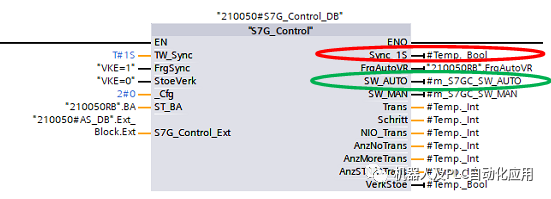
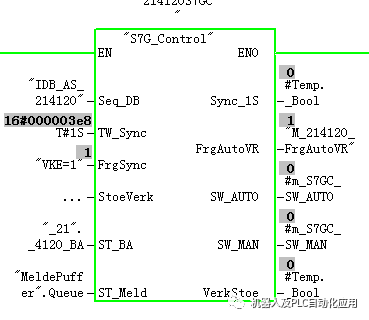
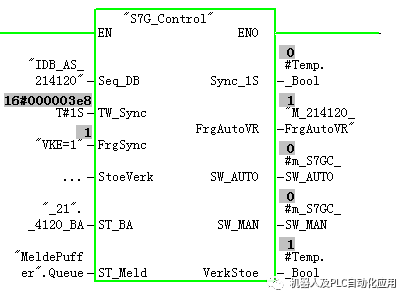
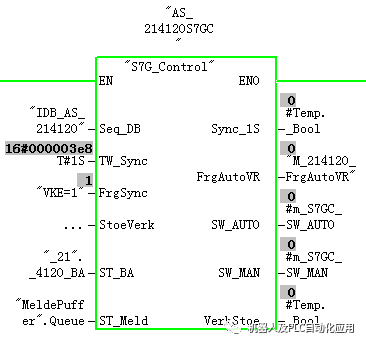
VASS中用來控制順序塊的主要功能FB642
FB 642 S7G_Control
該函數(shù)塊 (FB) 用于:
? 在手動模式中對順序進行自動跟蹤。
這用于對控制程序進行同步。
? 在步 x (Sx) 針對性地停機。
僅當自動模式 = “ 已激活”(active) 且 Sx = “ 非排除步”(No exclusion step) 時。
如果到達了停機步, S7-GRAPH 順序?qū)⑼V箞?zhí)行 (MOP.HALT)。
該塊通常采用專用背景數(shù)據(jù)塊進行訪問。
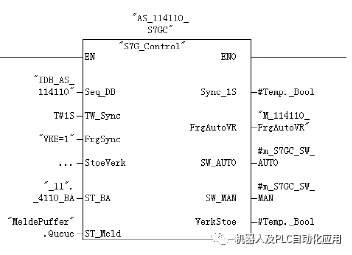
輸入
Seq_DB Block_DB: 被控制順序的背景數(shù)據(jù)塊
TW_Sync : TIME 時間值,用于檢測同步結(jié)果
Frg_Sync : 同步使能
StoeVerk : 故障系列輸入
輸入/輸出
ST_BA : 運行模式結(jié)構(gòu)
輸出
Sync_IS :同步結(jié)果 = 1 步,用于未決最小測試時間 "TW-Sync"
FrgAutoVR : 未找到有效步,接下來啟動 AutoVR
SW_AUTO: 啟動順序自動模式
SW_MAN: 啟動順序手動模式
VerkStoe: 故障組消息 = "StoeVerk" OR 特定故障
1.當沒有T條件滿足時,工作模式有自動變成手動時
SW_AUTO := (ST_BA.K9_BaAuto AND Sync_1S) OR ST_BA.K23_BaHand;
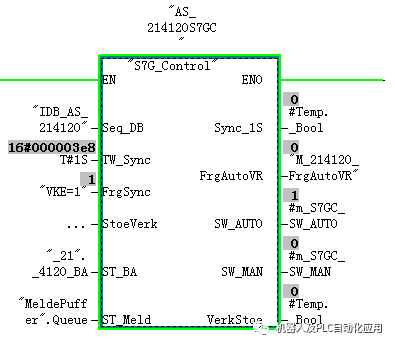
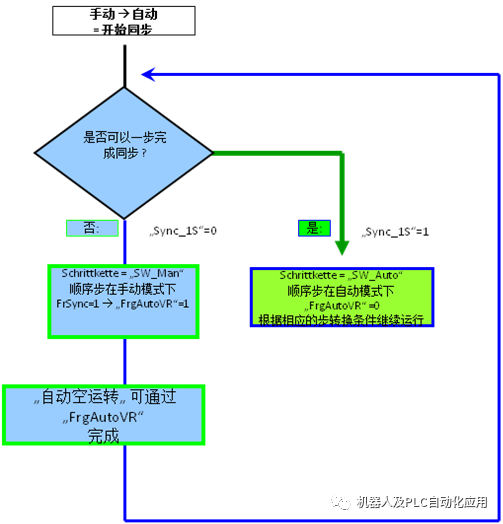
2. 工作模式由手動變成自動時 ,順序塊先是手動狀態(tài),檢測到只有一個T條件滿足時等待Sync_1S時間后變成自動并跳條件滿足的步,當沒有T條件滿足時如下:
此時激活了FRAUTOVR
R_TRIG_BaAuto (CLK:=ST_BA.K9_BaAuto AND Not F_TRIG_PoT.Q);
SW_MAN := R_TRIG_BaAuto.Q AND NOT Sync_1S; -自動關(guān)了就是手動
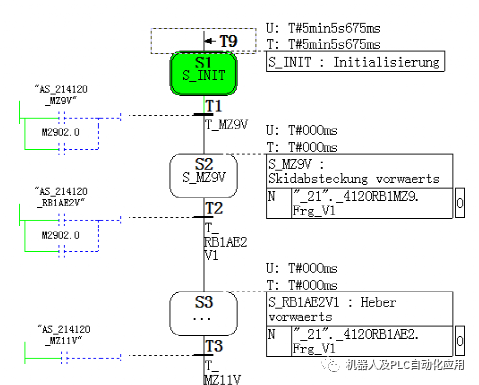
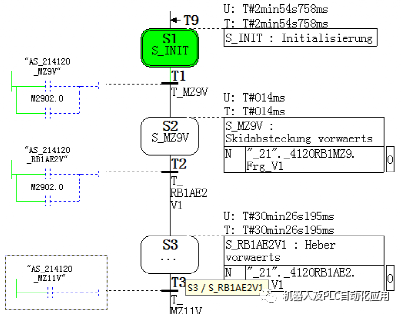
3.順序塊在自動模式時按條件的滿足只能向下運行,不能逆步向上跳轉(zhuǎn)。
當順序塊沒有使用FB642 7G_Control 控制時,順序塊不能自動跳步 ,不能逆步 。
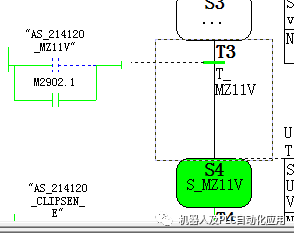
這時 當T3條件滿足時順序塊等待1S后會由手動變?yōu)樽詣油瑫r跳轉(zhuǎn)到該步。
在K40 沒有啟動時 就會把FrgAutoVR 關(guān)閉
ELSIF NOT FrgSync OR NOT SK_Auto OR NOT ST_BA.K40 OR Sync_1S OR Seq_DB.DX[pMOP, 0]=TRUE THEN
FrgAutoVR:= FALSE;
END_IF;
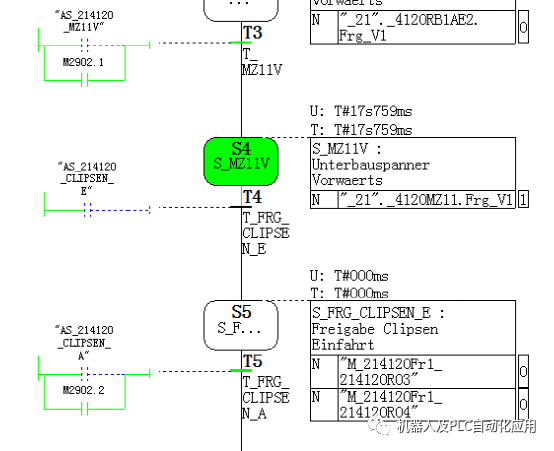
4.有多個條件T滿足時,工作的模式由手動變成自動時 ,這時順序塊的工作模式是手動, FrgAutoVR有輸出

5.只有1個條件T滿足時,工作的模式由手動變成自動時 ,這時順序塊的工作模式在TW_SYNC的時間后由手動變成自動。并跳到條件滿足步,關(guān)閉FrgAutoVR
Sync_1S會在瞬間發(fā)出1個脈沖

責任編輯:lq
-
機器人
+關(guān)注
關(guān)注
213文章
29568瀏覽量
211975 -
Auto
+關(guān)注
關(guān)注
0文章
43瀏覽量
15497 -
vr
+關(guān)注
關(guān)注
34文章
9669瀏覽量
152259
原文標題:VASS標準里的AUTO_VR功能
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
云里物里推出全新多按鍵倉儲標簽
自動化設備里 M12 接頭五口的巧妙接法

優(yōu)化自動駐車功能駕乘體驗的策略研究

萬里紅標準化工作再獲殊榮
C語言中申請的堆內(nèi)存能不能自動釋放
自動配料設備遠程監(jiān)控物聯(lián)網(wǎng)解決方案

物聯(lián)網(wǎng)設備的標準與規(guī)范
外接電源適配器設備安規(guī)標準


電機抱閘釋放時間控制
ATE自動測試設備原理及特點介紹

速動繼電器壓力釋放閥檢測臺安裝方法——每日了解電力知識






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論