") 基于嵌入式工控模塊和μC/OS-II實(shí)現(xiàn)車(chē)載狀態(tài)監(jiān)控系統(tǒng)的設(shè)計(jì)
基于嵌入式工控模塊和μC/OS-II實(shí)現(xiàn)車(chē)載狀態(tài)監(jiān)控系統(tǒng)的設(shè)計(jì)
介紹了一種大型搗固車(chē)工作狀態(tài)監(jiān)控系統(tǒng)的設(shè)計(jì)方案,重點(diǎn)介紹車(chē)載主監(jiān)控模塊的硬件設(shè)計(jì)及相關(guān)的軟件實(shí)現(xiàn)。該系統(tǒng)應(yīng)用新型的M22A系列嵌入式工控模塊MiniARM9080構(gòu)建硬件平臺(tái),內(nèi)嵌實(shí)時(shí)多任務(wù)操作系統(tǒng)μC/OS-II,實(shí)現(xiàn)對(duì)搗固車(chē)多個(gè)運(yùn)行參數(shù)的實(shí)時(shí)監(jiān)控。
搗固車(chē)是集機(jī)、電、液于一體的復(fù)雜系統(tǒng),其運(yùn)行參數(shù)多,工作環(huán)境惡劣,故障率高且難于排查,因此車(chē)載狀態(tài)監(jiān)控系統(tǒng)成為搗固車(chē)必不可少的監(jiān)控設(shè)備。但是目前國(guó)內(nèi)鐵路大型養(yǎng)路機(jī)械搗固車(chē)的電氣控制系統(tǒng)基本用的都是模擬電路,結(jié)構(gòu)復(fù)雜,故障率高,系統(tǒng)難以在線升級(jí),且不便于維修,因此進(jìn)行數(shù)字化改造是其迫切的要求。本文在傳統(tǒng)檢測(cè)系統(tǒng)的基礎(chǔ)上應(yīng)用新型的M22A系列ARM嵌入式工控模塊MiniARM9080對(duì)整車(chē)進(jìn)行現(xiàn)場(chǎng)實(shí)時(shí)監(jiān)控,通過(guò)無(wú)線網(wǎng)絡(luò)把實(shí)時(shí)工況數(shù)據(jù)和GPS數(shù)據(jù)上傳至上位機(jī),實(shí)時(shí)顯示機(jī)車(chē)的工作狀況,對(duì)異常進(jìn)行報(bào)警處理,并完成歷史回放功能。操縱人員可根據(jù)現(xiàn)場(chǎng)情況,隨時(shí)了解搗固車(chē)各部分運(yùn)行狀態(tài),及時(shí)發(fā)現(xiàn)搗固車(chē)的隱患,從而避免故障發(fā)生。
1 系統(tǒng)概述
本系統(tǒng)主要分為4個(gè)功能子模塊。(1)顯示終端人機(jī)交互模塊:負(fù)責(zé)搗固車(chē)現(xiàn)場(chǎng)監(jiān)控,為現(xiàn)場(chǎng)作業(yè)人員提供圖形化的工作參數(shù)數(shù)據(jù)參考; (2)車(chē)載MiniARM主控模塊:負(fù)責(zé)現(xiàn)場(chǎng)實(shí)時(shí)數(shù)據(jù)的采集、處理和傳輸,并為顯示終端與服務(wù)器的通信提供橋梁;(3)服務(wù)器:在物理上集通信服務(wù)器、數(shù)據(jù)庫(kù)服務(wù)器及WEB服務(wù)器為一體,具備遠(yuǎn)程網(wǎng)絡(luò)、WEB服務(wù)、關(guān)系數(shù)據(jù)庫(kù)和實(shí)時(shí)數(shù)據(jù)庫(kù)等功能;(4)客戶端:通過(guò)BS和CS兩種方式為廣州鐵路集團(tuán)數(shù)據(jù)監(jiān)控中心提供搗固車(chē)工作狀態(tài)遠(yuǎn)程監(jiān)控的功能。系統(tǒng)完整的拓?fù)浣Y(jié)構(gòu)圖如圖1所示。

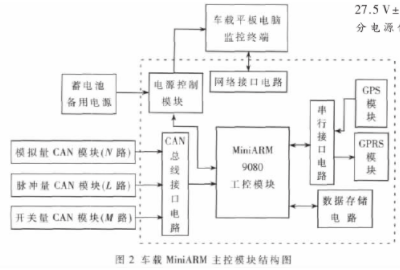
系統(tǒng)的車(chē)載部分包括MiniARM主控箱、平板監(jiān)控電腦、各個(gè)分散的CAN監(jiān)測(cè)點(diǎn)以及無(wú)線發(fā)送部分,整個(gè)系統(tǒng)的工作電壓為24 V。車(chē)載MiniARM系統(tǒng)主控模塊采用新型的M22A系列ARM嵌入式工控模塊MiniARM9080作為系統(tǒng)的控制核心,包含CAN數(shù)據(jù)采集結(jié)點(diǎn)、 GPS天線、通信和控制底板、交換機(jī)、以太網(wǎng)-CAN轉(zhuǎn)換器、蓄電池等功能部件,實(shí)現(xiàn)CAN數(shù)據(jù)采集、GPS數(shù)據(jù)接收、實(shí)時(shí)作業(yè)數(shù)據(jù)的處理、存儲(chǔ)和查詢及數(shù)據(jù)通信等功能。車(chē)載MiniARM系統(tǒng)主控模塊的結(jié)構(gòu)如圖2所示。其中虛線部分電路構(gòu)成系統(tǒng)通信與控制底板,安裝在MiniARM主控箱內(nèi),監(jiān)控設(shè)備 CAN模塊安裝在搗固車(chē)各個(gè)電氣電路箱內(nèi),電源控制模塊負(fù)責(zé)整個(gè)車(chē)載監(jiān)控系統(tǒng)的電源管理。
2 MiniARM9080核心板簡(jiǎn)介
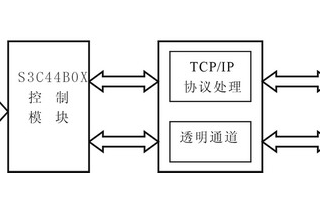
MiniARM9080嵌入式工業(yè)控制模塊[1]主要由LPC2290
(ARM7TDMI-S)工業(yè)級(jí)微控制器、程序存儲(chǔ)器、數(shù)據(jù)存儲(chǔ)器、工業(yè)級(jí)以太網(wǎng)控制器CS8900A、可校準(zhǔn)實(shí)時(shí)時(shí)鐘以及帶256 B E2PROM的復(fù)位監(jiān)控電路組成。其硬件結(jié)構(gòu)圖如圖3所示。總線通過(guò)緩沖保護(hù)電路與底板連接以保證微控制器總線運(yùn)行不受外界干擾,使模塊在EMC性能及穩(wěn)定性方面均有良好的表現(xiàn)。
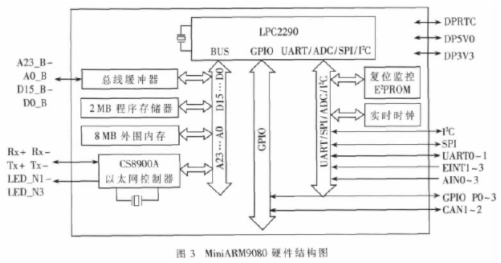
MiniARM工業(yè)控制模塊將ARM最小系統(tǒng)、以太網(wǎng)控制器、CAN/USB控制器、電子硬盤(pán)(Disk on Board)等設(shè)備高度集成于小巧的模塊之上,支持10 Mb/s以太網(wǎng)(工業(yè)級(jí))、2路CAN通信、CF卡接口、A/D轉(zhuǎn)換、低功耗RTC等功能。并直接以固件的形式提供穩(wěn)定的FAT文件系統(tǒng)、TCP-IP /CAN-BUS/USB/Modbus協(xié)議棧以及穩(wěn)健的?滋C/OSII實(shí)時(shí)操作系統(tǒng),為車(chē)載監(jiān)控系統(tǒng)主控模塊的設(shè)計(jì)提供了完整的解決方案。
3 系統(tǒng)硬件設(shè)計(jì)
3.1 電源管理模塊設(shè)計(jì)
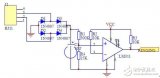
按照搗固車(chē)電氣系統(tǒng)標(biāo)準(zhǔn)[2],搗固車(chē)在正常作業(yè)情況下能產(chǎn)生穩(wěn)定且大功率的直流電源,其電壓值為27.5 V±5 %,輸出電流達(dá)3.5 A,因此可以直接利用這部分電源作為系統(tǒng)的工作電源。采用如圖4所示的電路來(lái)負(fù)責(zé)整個(gè)系統(tǒng)的電源管理。
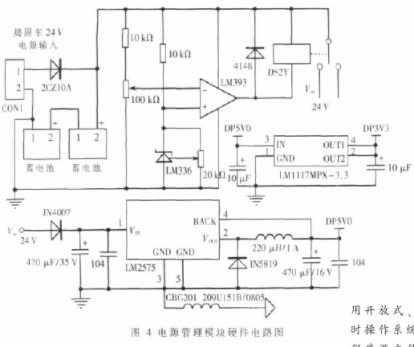
搗固車(chē)正常作業(yè)時(shí)通過(guò)大功率整流二極管2CZ10A提供整個(gè)系統(tǒng)的工作電源,同時(shí)也給蓄電池充電。當(dāng)搗固車(chē)停止作業(yè)時(shí),車(chē)載電源斷開(kāi),系統(tǒng)轉(zhuǎn)而由蓄電池組供電。這里采用2個(gè)6-DZM-12型蓄電池串聯(lián)組成系統(tǒng)24 V蓄電池電源,其容量達(dá)48 AH。同時(shí)為了防止由于搗固車(chē)的長(zhǎng)期不工作而導(dǎo)致蓄電池的“枯竭”,設(shè)計(jì)原則是當(dāng)蓄電池組輸出電壓降到一定程度時(shí)切斷其供電電路,從而起到保護(hù)作用,為此電路中采用1片雙電壓比較器集成芯片LM393, 該芯片單電源工作時(shí)電源電壓范圍為 2 V~36 V,可以滿足系統(tǒng)要求,其反相輸入端通過(guò)滑動(dòng)變阻器連接到蓄電池的正極,同相輸入端加一個(gè)參考電壓。集成電路LM336通過(guò)變阻器能夠提供4 V~6 V之間穩(wěn)定的基準(zhǔn)電壓值,這里設(shè)置同相輸入端參考電壓為5 V,并設(shè)置反相輸入端的電壓維持在15 V左右,當(dāng)系統(tǒng)正常工作時(shí)比較器反相端電壓高于同相端, 輸出管飽和,相當(dāng)于輸出端接低電位,此時(shí)繼電器開(kāi)關(guān)閉合,系統(tǒng)獲得24 V電壓源,隨著蓄電池組輸出電壓的下降,LM339反相端輸出電壓也隨之下降,當(dāng)電壓值低于參考電壓時(shí),比較器反轉(zhuǎn),輸出管截止,此時(shí)繼電器斷開(kāi),整個(gè)監(jiān)控電路24 V輸入電源切斷,從而起到了對(duì)蓄電池組的保護(hù)作用。由于MiniARM9080需要5.0 V/3.3 V雙電源供電,系統(tǒng)輸入電壓比較大,這里采用開(kāi)關(guān)穩(wěn)壓集成電路LM2575和低壓差線性調(diào)壓器LM1117,可以獲得穩(wěn)定的5 V和3.3 V輸入電源。
3.2 通信接口
MiniARM控制板在整個(gè)系統(tǒng)通信中處于核心的位置,既要負(fù)責(zé)實(shí)時(shí)數(shù)據(jù)的采集和發(fā)送,又要與現(xiàn)場(chǎng)監(jiān)控終端和遠(yuǎn)端的服務(wù)器通信,同時(shí)也是服務(wù)器和現(xiàn)場(chǎng)監(jiān)控終端之間相互通信的橋梁。按照實(shí)現(xiàn)的功能和通信對(duì)象的不同,系統(tǒng)主要建立如下4種不同的接口電路。
(1) 數(shù)據(jù)存儲(chǔ)接口:該部分主要負(fù)責(zé)實(shí)時(shí)數(shù)據(jù)的存儲(chǔ),提供服務(wù)器歷史數(shù)據(jù)的回放,采用1片512 MB的CF卡作為數(shù)據(jù)存儲(chǔ)介質(zhì),歷史數(shù)據(jù)可保存7天。
(2) RS232串行接口:該部分通過(guò)1片SP3232E芯片提供2路標(biāo)準(zhǔn)的串行接口,分別連接GPS模塊與DTU模塊。GPS模塊采用臺(tái)灣鼎天的REB- 22R系列GPS數(shù)據(jù)接收模塊。DTU模塊采用廈門(mén)桑榮公司的Saro3150PGPRS無(wú)線數(shù)據(jù)傳輸終端,主要用來(lái)實(shí)現(xiàn)與服務(wù)器之間的無(wú)線通信。
(3) TCP/IP通信接口:由于MiniARM9080工控模塊內(nèi)部已經(jīng)整合了CS8900A以太網(wǎng)控制器,因此只需外接1片網(wǎng)絡(luò)隔離變壓器HR601629E芯片和相應(yīng)的匹配電阻、高壓電容即可與外界可靠通信,這里主要實(shí)現(xiàn)與現(xiàn)場(chǎng)監(jiān)控的平板電腦之間的可靠通信。
(4) CAN-BUS通信接口:該部分電路由帶隔離的高速CAN總線收發(fā)器模塊CTM1050、總線ESD保護(hù)器件PESD1CAN及相應(yīng)的電阻組成,主要負(fù)責(zé)與現(xiàn)場(chǎng)CAN數(shù)據(jù)采集裝置的通信。
3.3 控制及檢測(cè)電路
由于搗固車(chē)有作業(yè)和停止兩種不同的狀態(tài),需要有相應(yīng)的電路來(lái)檢測(cè)狀態(tài)的改變,這里通過(guò)一個(gè)簡(jiǎn)單的電壓采樣電路來(lái)實(shí)現(xiàn)。另外在機(jī)車(chē)工作時(shí)需要同時(shí)開(kāi)啟各個(gè)功能模塊,而在機(jī)車(chē)停止作業(yè)時(shí)部分功能模塊(如平板電腦、CAN數(shù)據(jù)采集點(diǎn)等)需要關(guān)閉以降低系統(tǒng)功耗。同時(shí)為了保證GPRS通信模塊正常通信,也需要設(shè)置相應(yīng)電路在其出現(xiàn)故障時(shí)對(duì)其進(jìn)行硬件復(fù)位,這就需要設(shè)計(jì)相應(yīng)的硬件電路來(lái)控制它們的開(kāi)關(guān)。MiniARM輸出驅(qū)動(dòng)能力有限,這里采用三極管放大電路驅(qū)動(dòng)繼電器來(lái)控制相應(yīng)功能模塊的工作狀態(tài)。具體的控制策略由軟件來(lái)控制實(shí)現(xiàn)。
4 系統(tǒng)軟件設(shè)計(jì)
4.1 系統(tǒng)主程序設(shè)計(jì)
軟件設(shè)計(jì)是整個(gè)系統(tǒng)設(shè)計(jì)的重要組成部分,其核心功能是實(shí)時(shí)數(shù)據(jù)的采集、處理、存儲(chǔ)和轉(zhuǎn)發(fā),車(chē)載監(jiān)控系統(tǒng)對(duì)數(shù)據(jù)處理的實(shí)時(shí)性和并發(fā)性有較高的要求,因此采用開(kāi)放式、可裁剪、高可靠性、可剝奪性內(nèi)核的嵌入式實(shí)時(shí)操作系統(tǒng)μCOSII[3]。本系統(tǒng)主程序?qū)崿F(xiàn)3個(gè)主要的C程序源文件:main.c、train.c、ISR.c,其中train.c主要實(shí)現(xiàn)各種功能子函數(shù),包括格式轉(zhuǎn)換、CAN 模塊驅(qū)動(dòng)、數(shù)據(jù)轉(zhuǎn)換等子函數(shù)及全局變量定義,相當(dāng)于實(shí)現(xiàn)自定義的庫(kù)函數(shù);ISR.c主要實(shí)現(xiàn)各類(lèi)中斷子程序以及定時(shí)器,同步等功能;main.c實(shí)現(xiàn)操作系統(tǒng)μC/OSII的初始化、系統(tǒng)的啟動(dòng)及相應(yīng)的任務(wù)實(shí)現(xiàn),在本系統(tǒng)中主要建立6個(gè)不同的任務(wù),分別實(shí)現(xiàn)以下不同的功能:
Task0:主要實(shí)現(xiàn)串口初始化,CAN實(shí)時(shí)數(shù)據(jù)采集,GPRS通信處理算法以及同服務(wù)器之間的相互通信。
Task1:負(fù)責(zé)GPS數(shù)據(jù)處理和實(shí)時(shí)數(shù)據(jù)傳輸。
Task2:實(shí)現(xiàn)與平板電腦之間TCP/IP數(shù)據(jù)通信功能。
Task3:定時(shí)與同步控制處理。
Task4:負(fù)責(zé)實(shí)時(shí)數(shù)據(jù)存儲(chǔ)及歷史數(shù)據(jù)提取功能的實(shí)現(xiàn)
Task6:電源管理模塊的軟件實(shí)現(xiàn)。
4.2 通信協(xié)議的設(shè)計(jì)
MiniARM主控箱除了負(fù)責(zé)現(xiàn)場(chǎng)實(shí)時(shí)數(shù)據(jù)的采集外,還需要與本地的現(xiàn)場(chǎng)監(jiān)控平板電腦以及遠(yuǎn)端的服務(wù)器進(jìn)行通信,處理實(shí)時(shí)數(shù)據(jù)與控制命令的傳輸。三方通信均采用客戶端/服務(wù)器模式(C/S),進(jìn)行雙向數(shù)據(jù)通信。在與平板電腦通信時(shí), MiniARM主控箱作為服務(wù)器,通信雙方建立可靠的TCP連接實(shí)現(xiàn)雙向通信。在與遠(yuǎn)程服務(wù)器通信時(shí), MiniARM主控箱作為客戶端,采用工業(yè)級(jí)外置式GPRS無(wú)線數(shù)傳模塊(DTU),通過(guò)GPRS網(wǎng)絡(luò)實(shí)現(xiàn)遠(yuǎn)程雙向數(shù)據(jù)通信。同時(shí)MiniARM主控箱也作為平板電腦與遠(yuǎn)端服務(wù)器通信的橋梁。本文設(shè)計(jì)了統(tǒng)一的通信協(xié)議實(shí)現(xiàn)三方的相互通信,提供了統(tǒng)一的標(biāo)準(zhǔn)幀結(jié)構(gòu)。該協(xié)議對(duì)應(yīng)TCP/IP體系結(jié)構(gòu)的應(yīng)用層。標(biāo)準(zhǔn)幀結(jié)構(gòu)如圖5所示。
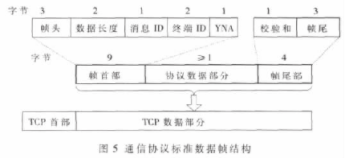
該通信協(xié)議的設(shè)計(jì)借鑒GPS數(shù)據(jù)通信NEMA0183[4]標(biāo)準(zhǔn)的思想,同時(shí)又結(jié)合了系統(tǒng)本身的設(shè)計(jì)要求。該協(xié)議由幀首部、協(xié)議數(shù)據(jù)部分、幀尾部3個(gè)字段組成,其中幀頭由三個(gè)字節(jié)的字符串“$$$”來(lái)表示,數(shù)據(jù)長(zhǎng)度部分共16位,表示從消息ID開(kāi)始到校驗(yàn)碼之前的數(shù)據(jù)長(zhǎng)度,以字節(jié)為單位;消息ID表征本幀數(shù)據(jù)在通信系統(tǒng)中實(shí)現(xiàn)的功能;終端ID是標(biāo)識(shí)本系統(tǒng)的惟一的ID號(hào);YNA字段代表本幀是否需要回復(fù),當(dāng)其值為0時(shí)表示不需要回復(fù),為1時(shí)需要回復(fù)。協(xié)議數(shù)據(jù)部分是長(zhǎng)度可變的字段,其長(zhǎng)度最小為1個(gè)字節(jié),包含的內(nèi)容根據(jù)消息ID的不同有很大的改變,除包含真正的數(shù)據(jù)外,還包括消息序列號(hào)、各數(shù)據(jù)量的個(gè)數(shù)以及填充字段等信息。校驗(yàn)和部分可采用CRC等校驗(yàn)手段,由于TCP通信能夠保證數(shù)據(jù)傳輸?shù)目煽啃裕@里只需要確保發(fā)送端DTU數(shù)據(jù)發(fā)送的正確性,因此采用簡(jiǎn)單的累加校驗(yàn)和的方式,校驗(yàn)數(shù)據(jù)為消息ID到校驗(yàn)碼之前的數(shù)據(jù)部分;最后以字符串 “END”作為本數(shù)據(jù)包的幀尾。
4.3 無(wú)線通信可靠性設(shè)計(jì)
車(chē)載監(jiān)控系統(tǒng)與遠(yuǎn)程服務(wù)器之間的通信基于中國(guó)移動(dòng)GPRS網(wǎng)絡(luò),采用工業(yè)級(jí)外置式GPRS無(wú)線數(shù)傳模塊(DTU)進(jìn)行遠(yuǎn)程數(shù)據(jù)通信,保證其通信的可靠性和穩(wěn)定性是本系統(tǒng)設(shè)計(jì)的關(guān)鍵。雖然 TCP通信基于可靠的連接,能夠保證服務(wù)器接收數(shù)據(jù)的正確性,但不能保證由于GPRS信道本身原因引起的數(shù)據(jù)丟失及錯(cuò)誤。另外,DTU模塊受外界干擾而導(dǎo)致數(shù)據(jù)處理錯(cuò)誤或者死機(jī)等情況也是影響數(shù)據(jù)通信可靠性和穩(wěn)定性的重要因素。為此從DTU模塊的角度出發(fā),設(shè)計(jì)了相應(yīng)的控制策略,其控制流程如圖6所示。
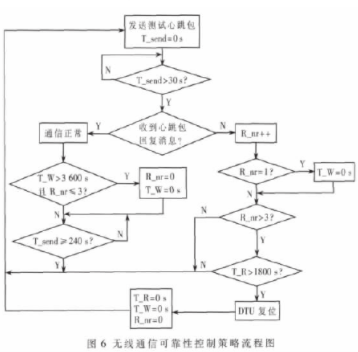
首先車(chē)載監(jiān)控系統(tǒng)通過(guò)DTU周期性地向遠(yuǎn)程服務(wù)器發(fā)送測(cè)試心跳包,發(fā)送周期為240 s,遠(yuǎn)程服務(wù)器收到該心跳包后立即發(fā)送一條回復(fù)消息,監(jiān)控系統(tǒng)判斷在30 s內(nèi)是否收到服務(wù)器的回復(fù)消息,如果收到回復(fù),則一次完整的測(cè)試通信狀況流程結(jié)束,此時(shí)通信正常,監(jiān)控系統(tǒng)等待下一個(gè)發(fā)送周期再次發(fā)送測(cè)試心跳包;否則監(jiān)控系統(tǒng)將轉(zhuǎn)為出錯(cuò)處理,此時(shí)系統(tǒng)將立即重發(fā)一個(gè)測(cè)試心跳包并進(jìn)入下一個(gè)30 s回復(fù)消息等待周期。如果重發(fā)超過(guò)3次沒(méi)收到任何回復(fù)消息,通常以將DTU斷電5 s方式硬復(fù)位DTU保證其工作的正常性,這樣可防止系統(tǒng)因DTU本身的故障而引起的通信問(wèn)題。但同時(shí)也要考慮另外一個(gè)故障源——GPRS無(wú)線信道,比如搗固車(chē)在山洞里面作業(yè)的情況。此時(shí)由于通信信號(hào)的原因?qū)?huì)引起DTU的頻繁開(kāi)關(guān)硬復(fù)位,為了避免這一情況,系統(tǒng)在監(jiān)測(cè)到重發(fā)次數(shù)超過(guò)3次時(shí),先判斷距離上一次的復(fù)位時(shí)間是否超過(guò)一定的時(shí)間間隔,如果超過(guò)(這里設(shè)置為1 800 s),則進(jìn)行DTU硬復(fù)位操作。另外,系統(tǒng)在正常通信的情況下也會(huì)因?yàn)榕既坏囊蛩貙?dǎo)致個(gè)別的通信測(cè)試失敗,但整個(gè)系統(tǒng)仍然處于正常的工作狀態(tài),這時(shí)采用如下機(jī)制:在第1次出現(xiàn)重發(fā)狀況時(shí),設(shè)定1個(gè)定時(shí)器,定時(shí)時(shí)間為1小時(shí),當(dāng)定時(shí)時(shí)間到時(shí)再判斷,如果重發(fā)次數(shù)不超過(guò)3次,則表示通信正常并重發(fā)計(jì)數(shù)值清零。當(dāng)然系統(tǒng)在DTU硬復(fù)位時(shí)也需要清除定時(shí)器以及重發(fā)計(jì)數(shù)器,來(lái)保證下一次通信的正常判斷。通過(guò)以上的控制策略,并經(jīng)實(shí)踐證實(shí),基本上能保證通信的最大可靠性。
本文研究設(shè)計(jì)的車(chē)載監(jiān)控系統(tǒng)已經(jīng)達(dá)到實(shí)用化的階段,目前已經(jīng)在廣鐵集團(tuán)08-32型搗固車(chē)上試運(yùn)行半年,系統(tǒng)整體設(shè)計(jì)已經(jīng)達(dá)到了預(yù)期的功能和可靠性要求,對(duì)提高車(chē)輛的維修質(zhì)量、檢修效率,推行經(jīng)濟(jì)高效、先進(jìn)合理的預(yù)知維修制式有著極大的促進(jìn)作用。
責(zé)任編輯:gt
-
嵌入式
+關(guān)注
關(guān)注
5141文章
19544瀏覽量
315214 -
服務(wù)器
+關(guān)注
關(guān)注
13文章
9706瀏覽量
87322 -
監(jiān)控系統(tǒng)
+關(guān)注
關(guān)注
21文章
4034瀏覽量
181351
發(fā)布評(píng)論請(qǐng)先 登錄
基于μC/OS-II嵌入式的固話來(lái)電防火墻電路模塊設(shè)計(jì)
【圖書(shū)分享】嵌入式實(shí)時(shí)操作系統(tǒng)μC/OS-II經(jīng)典實(shí)例
基于μC/OS-II的嵌入式音頻系統(tǒng)設(shè)計(jì)
嵌入式實(shí)時(shí)操作系統(tǒng)μC/OS-II與eCos的比較
μC/OS-II 在Nios上的移植
μC OS-II 在Nios 上的移植1
嵌入式實(shí)時(shí)操作系統(tǒng)μC OS-II與eCos的比較
EPA 通信協(xié)議在μC/OS-II嵌入式系統(tǒng)中的設(shè)計(jì)與實(shí)現(xiàn)
嵌入式μC/OS-II在LPC2104上的移植及通信設(shè)計(jì)
基于嵌入式系統(tǒng)μC/OS-II的雙CAN通信構(gòu)件
基于uc/os-ii 的嵌入式GUI研究與應(yīng)用
基于ARM的嵌入式操作系統(tǒng)μC/OS-II的移植
基于ARM+μC/OS-II的嵌入式數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
μC/OS-II在EP7312上的移植
基于實(shí)時(shí)嵌入式操作系統(tǒng)mC/OS-II實(shí)現(xiàn)GPRS終端系統(tǒng)的設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論