") 基于GPS定位技術和GPRS通信模塊實現(xiàn)車載導航系統(tǒng)終端的設計
基于GPS定位技術和GPRS通信模塊實現(xiàn)車載導航系統(tǒng)終端的設計
作者:凡書明, 朱建光, 余紅英
引言
面對龐大的汽車市場以及隨著全國各省市高速公路路網(wǎng)的建設與完善,對交通管理信息化的要求越來越高,gps車載系統(tǒng)的潛力不可估量,其發(fā)展前景比較樂觀。日本和西方各大公司都參與了這場高科技的角逐。各發(fā)達國家的很多生產(chǎn)商都加快了車載導航系統(tǒng)的研究步伐。隨著嵌入式技術的發(fā)展,很多資源不足的瓶頸問題都很大程度上得到了解決。車載定位系統(tǒng)由車載定位終端、無線通信鏈路和車載監(jiān)控管理系統(tǒng)三部分組成。其主要功能是將移動目標的動態(tài)位置(經(jīng)度和緯度)、時間和海拔等對用戶有用的信息,通過無線通信鏈路傳送到監(jiān)控中心,而后在電子地圖上對移動目標的運動軌跡進行顯示,并對車輛的準確位置、速度、運動方向和車輛狀態(tài)等用戶感興趣的參數(shù)進行監(jiān)控和查詢,為調(diào)度管理提供可視化依據(jù),提高車輛運行效率,還能起到節(jié)能減排的作用。也在一定程度上起到保護地球的作用。本文將gps定位技術應用于氣車,與現(xiàn)有定位技術組合起來共同完成定位監(jiān)控任務,將大大提高定位準確性及安全性,同時能夠降低資金投入,具有很廣闊的發(fā)展空間。
系統(tǒng)總體設計
系統(tǒng)硬件的結(jié)構(gòu)設計
車輛監(jiān)控系統(tǒng)由車載端(包括arm工控機、觸摸屏、gps接收模塊和電源等)、通信系統(tǒng)(gprs)、監(jiān)控中心三大部分組成。車載端的gps模塊實時接收全球定位衛(wèi)星的位置、時間等數(shù)據(jù),一方面發(fā)送給車內(nèi)的arm微型工控機,得到車輛的當前位置并且在電子地圖上顯示:另一方面,數(shù)據(jù)將通過gprs終端模塊發(fā)送到遠程監(jiān)控中心服務器,使得監(jiān)控中心能實時得到所有車輛的位置信息,給車輛的安全監(jiān)控以及遠程凋度提供了基礎。通過spi接口與can總線相連,利用can總線掛接傳感器,檢測汽車主要技術參數(shù),can總線模塊可以使本系統(tǒng)與其他車載模塊的連接,完成收集車輛的狀態(tài)信息以及進一步控制。can總線模塊主要包括can總線的控制器和收發(fā)器,在這里分別選用的是microchip公司的mcp2510和飛利浦公司的pca82c250。其中,can總線控制器mcp2510實現(xiàn)了can總線的協(xié)議,can總線收發(fā)器pca82c250提供協(xié)議控制器和物理傳輸線路之間的接口。由于can總線控制器mcp2510具有spi接口,因此,系統(tǒng)中將其與s3c2440的spi0相連。故障檢測模塊主要是對汽車的主要技術參數(shù)進行檢測,并顯示到lcd顯示器上,如果檢測到故障,會發(fā)出報警信號。本文主要檢測的技術參數(shù)包括燃油消耗量、制動力、轉(zhuǎn)向力、發(fā)動機溫度、冷卻液溫度、前照燈,以及車內(nèi)噪聲和尾氣等方面。該模塊主要是通過各種傳感器把各種信號轉(zhuǎn)換為電信號,再利用信號處理電路把電信號進行相應的處理,使其能與can總線模塊進行數(shù)據(jù)傳輸。車載端的硬件組成框圖,如圖1所示。
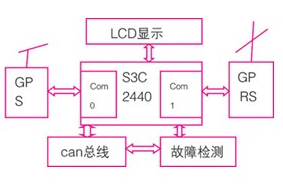
圖1 車載端的硬件組成框圖
應用程序總結(jié)構(gòu)
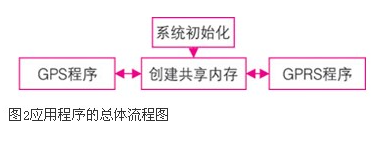
應用程序的總體流程圖如圖2所示。由于gprs模塊和gps模塊都是通過串口和監(jiān)控終端連接的,程序系統(tǒng)初始化的工作就是對串口進行初始化,使串口按gprs及gps模塊的要求工作。之后創(chuàng)建共享內(nèi)存是為gprs通信子進程與gps子進程之間的通信做準備。gps子進程負責從串口接收gps信息并把這些信息寫入共享內(nèi)存內(nèi),gprs子進程則將共享內(nèi)存內(nèi)的gps信息通過網(wǎng)絡送到遠方的監(jiān)控服務器。
gps驅(qū)動程序的編寫
為了使arm上的應用程序能夠處理gps接收到的導航信號,要編寫gps的驅(qū)動程序。
這個gps驅(qū)動程序也是屬于字符型驅(qū)動程序,首先了解嵌入式開發(fā)中應用程序、庫、內(nèi)核、驅(qū)動程序的關系:應用程序調(diào)用應用程序庫函數(shù)完成功能;應用程序以文件形式訪問各種資源;應用程序函數(shù)庫的一部分直接完成功能,一部分函數(shù)通過系統(tǒng)調(diào)用由內(nèi)核完成,內(nèi)核處理系統(tǒng)調(diào)用,調(diào)用設備驅(qū)動程序,設備驅(qū)動程序直接與硬件通信。如圖3所示

一般linux的設備驅(qū)動有三種類型,字符設備、塊設備、網(wǎng)絡設備。而我要講的gps模塊的驅(qū)動程序是屬于字符設備。對于字符設備發(fā)出讀/寫請求時,實際的硬件i/o操作一般緊接著發(fā)生。在設備管理中,除了設備類型外,內(nèi)核還需要一對被稱為主從設備號的參數(shù),才能唯一標識一個設備。主設備號相同的設備使用相同的驅(qū)動程序,從設備號用于區(qū)分具體設備的實例。用命令cat/proc/devices可以查看系統(tǒng)中所有設備對應的主設備號。所以在gps驅(qū)動程序的開始定義設備名稱#define device_name “s3c2440-gps”再定義主設備號,我是讓系統(tǒng)自動分配的,以防主設備號已被占用,static int gps_major=0;驅(qū)動程序以一個模塊初始化函數(shù)作為入口,如module_init(s3c2440_gps_init)向內(nèi)核聲明當前模塊的初始化函數(shù);再寫gps的初始化函數(shù):static int __init s3c2440_gps_init(void)函數(shù),在這個函數(shù)里面注冊一個設備,返回主設備號,可以寫成:gps_major=register_chrdev(0,device _name,&s3c2440_gps_fops),s3c2440_gps_fops是定義了的結(jié)構(gòu)體,規(guī)定了驅(qū)動程序向應用程序提供的操作接口。如:static struct file_operations s3c2440_gps _fops ={.owner= this_module,。
open= s3c2440_gps_open,.release= s3c2440_gps_release=s3c2440_gps_release, .ioctl=s3c2440_gps_ioctl};繼續(xù)向下寫,gps_class=class_create(this_module,device_name);在/sysfs目錄下創(chuàng)建這個設備的類。再是注冊這個設備的類,如device_create(gps_class,null,mkdev(gps_major,0),null,device_name)。
gps應用程序即定位功能的實現(xiàn)
要實現(xiàn)gps的定位必須先要對gps數(shù)據(jù)包進行解析,gps上電后,每隔一定的時間就會返回一定格式的數(shù)據(jù),數(shù)據(jù)格式為$信息類型,每行開頭的字符都是$,接著是信息類型,后面的是數(shù)據(jù),以逗號分開,完整的數(shù)據(jù)類型如下:$gprmc,080655.00,a,4546.40891,n,12639.65641,e,1.045,328.42,170809,,,a*60信息類型為:gpgsv:可見衛(wèi)星信息、gpgll:地理定位信息、gprmc:推薦最小定位信息、gpvtg:地面速度信息、gpgga:gps定位信息、gpgsa:當前衛(wèi)星信息、這里我只解析gprmc和gpgga的信息。一.gprmc數(shù)據(jù)詳解:$gprmc,《1》,《2》,《3》,《4》,《5》,《6》,《7》,《8》,《9》,《10》,《11》,《12》*hh《1》utc時間,hhmmss(時分秒)格式《2》定位狀態(tài),a=有效定位,v=無效定位《3》緯度ddmm.mmmm(度分)格式(前面的0也將被傳輸)《4》緯度半球n(北半球)或s(南半球)《5》經(jīng)度dddmm.mmmm(度分)格式(前面的0也將被傳輸)《6》經(jīng)度半球e(東經(jīng))或w(西經(jīng))……。
最后編寫代碼,把經(jīng)/緯度解析出來,對于gpgga類型數(shù)據(jù),也是一樣,先了解每一位的含義,再寫代碼把海平面高度和大地水平面高度等數(shù)據(jù)解析并顯示出來。
gprs通信模塊實現(xiàn)
gprs模塊是借助gprs無線網(wǎng)絡實現(xiàn)數(shù)據(jù)的無線傳輸,從而在不同的車輛或車輛與控制中心之間架起溝通的橋梁,所以軟件的功能主要是建立無線連接,按照gprs通信協(xié)議傳輸數(shù)據(jù)。gprs模塊的通信主要是通過串口驅(qū)動實現(xiàn),在嵌入式linux內(nèi)核中已經(jīng)提供了對串設備的支持,因此在配置內(nèi)核編譯選項時,只需要選中對串口設備的支持,就可以實現(xiàn)對gprs模塊的串口數(shù)據(jù)通信功能。為了實現(xiàn)與internet的通信,還需要在配置內(nèi)核編譯選項時選中ppp和tcp/ip協(xié)議。這樣一旦網(wǎng)絡連接建立,就可以使用應用程序來實現(xiàn)網(wǎng)絡數(shù)據(jù)的通信。本系統(tǒng)數(shù)據(jù)鏈路層采用ppp協(xié)議,它是一種面向字符的協(xié)議,是為在兩個對等實體間傳輸數(shù)據(jù)包連接而設計的,使用可擴展的鏈路控制協(xié)議lcp來建立、配置和測試數(shù)據(jù)鏈路。用網(wǎng)絡控制協(xié)議族ncp來建立和配置不同的網(wǎng)絡層協(xié)議,并且允許采用多種網(wǎng)絡層協(xié)議。一個ppp會話分四個步驟:建立連接、連接質(zhì)量控制、網(wǎng)絡層協(xié)議配置和連接終止。
嵌入式linux系統(tǒng)內(nèi)核源自于linux內(nèi)核,并保留了對tcp/ip以及其他的網(wǎng)絡協(xié)議的支持。在嵌入式linux系統(tǒng)上編寫網(wǎng)絡應用程序與在linux上編寫網(wǎng)絡應用程序沒什么大區(qū)別,通常只需要做很小的修改就可以移植到嵌入式linux系統(tǒng)上。至此,gprs模塊完整地集成到嵌入式終端中。
can模塊實現(xiàn)
can總線驅(qū)動程序要完成的報文發(fā)送、接收等任務都是圍繞can總線控制器展開的,因此驅(qū)動程序主要是對控制器mcp2510內(nèi)部寄存器進行操作。can總線控制器mcp2510的初始化按照以下步驟進行:(1)軟件復位,進入配置模式;(2)設置can總線波特率;(3)關閉中斷,設置id過濾器;(4)切換mcp2510到正常狀態(tài);(5)清空接收和發(fā)送緩沖區(qū);(6)開啟接收緩沖區(qū),開啟中斷。
實驗結(jié)果
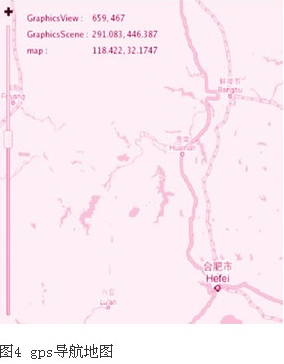
本實驗結(jié)果能達到基本的要求,參見圖4,圖的右上角是經(jīng)/緯度。本系統(tǒng)還不完善,還有很多實用的功能有待進一步開發(fā)。
結(jié)論
該系統(tǒng)能夠通過gps和gprs實現(xiàn)車輛定位以及車輛與控制中心之間的數(shù)據(jù)通信,還能夠通過can總線檢測汽車主要技術參數(shù),為交通道路的智能管理以及汽車的安全駕駛提供了可靠保障。
責任編輯:gt
-
gps
+關注
關注
22文章
2967瀏覽量
168568 -
GPRS
+關注
關注
21文章
985瀏覽量
130889 -
導航系統(tǒng)
+關注
關注
2文章
272瀏覽量
31232
發(fā)布評論請先 登錄
GPS/GPRS定位定向導航系統(tǒng)車載終端應用設計與實現(xiàn)
最受工程師歡迎的車載設計方案——基于STM32+GPRS+GPS+Google Earth的車載導航定位系統(tǒng)
ADXL202和GPS怎么組合成車載導航系統(tǒng)?
怎么實現(xiàn)基于DSP的車載GPS/DR組合導航系統(tǒng)硬件設計?
請問怎樣去設計車載GPS/DR組合導航系統(tǒng)?
怎么實現(xiàn)GPS_GPRS定位定向導航系統(tǒng)車載終端應用設計?
基于GPS的汽車導航系統(tǒng)的設計與實現(xiàn)
GPS導航系統(tǒng),GPS導航系統(tǒng)是什么意思
ARM與GPRS自導航系統(tǒng)終端設計與實現(xiàn)
定位有漂移? 您選對車載導航GPS模塊廠家了嗎?
基于嵌入式Linux的GPS車載定位導航系統(tǒng)設計






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論