") 基于Arduino的多功能機械臂設(shè)計方案
基于Arduino的多功能機械臂設(shè)計方案
步驟1:準(zhǔn)備材料 下面的圖片顯示了您需要的所有組件。
清單:
主臂
軸
Arduino mega2560開發(fā)板
三步電動機
軸承規(guī)格:6 * 12 * 4
銅墊片規(guī)格:t厚度1.5mm
M3螺母
M5螺栓
M2 * 8內(nèi)六角螺栓
M2.5 * 12內(nèi)六角螺栓
M3 * 10內(nèi)六角螺栓
步驟2:準(zhǔn)備工具 您需要準(zhǔn)備以下工具: 一個錘子 四個內(nèi)六角扳手,包括M4,M3,M5和M2 一些膠水和一個尖嘴鉗,用于打開M4卡扣

步驟3:將襯套和軸承添加到三個軸上 6 * 10 * 8銅套管添加到甲 軸和6 * 10 * 4銅襯套添加到乙軸,然后將6 * 12 * 4軸承添加到?軸線。在將這些組件添加到軸時要小心,必須確保襯套和軸承與軸垂直,否則會出現(xiàn)帶有襯套的歪斜軸。也許您需要用錘子輕輕敲擊襯套和軸承。完成這些零件后,在軸與襯套或軸承之間的接觸表面上添加一些膠水,以確保在軸與襯套或軸承之間沒有任何滑動。
步驟4:將三個軸與三角形鏈接部分連接 然后,我們將三個軸與三角形鏈接部分相連。首先,將φ6* 9 mm的軸添加到三角形連接部分上,然后將套管添加到連接部分中。您應(yīng)注意套管的方向。其次,在軸上添加一個0.7mm的尼龍墊圈。第三,將帶有襯套的A軸和B 軸分別添加到鏈接部分,并且必須注意兩個軸的方向。圖中顯示了軸的正確方向。然后我們分別使用兩個捕捉來固定A和B軸。

步驟5:將平行支撐部分與B軸連接 用兩顆M3 * 10螺釘將小塊與平行支架的主要部分固定在一起。將φ6* 14軸添加到A軸的另一側(cè),并在其中添加0.7mm的墊圈。完成這些步驟后,在右側(cè)添加平行支撐,然后使用兩個卡扣將其固定。
步驟6:將手臂的頭部與A軸的另一側(cè)連接 首先,將手臂的頭部與A軸的另一側(cè)放在一起,并在其中添加兩個0.7mm的墊圈。然后,將6 * 10 * 6銅套放在正確的位置,并通過孔添加φ6* 18的軸。正確的位置是什么意思?這意味著當(dāng)您看著前方的手臂時,銅套位于A軸的左側(cè)和手臂頭部的右側(cè)之間,而兩個墊圈在另一側(cè)。然后我們再次用兩個快照修復(fù)它們。
步驟7:組裝小臂 首先,將6 * 12 * 4軸承添加到軸承襯套,然后將軸承襯套添加到小臂的小側(cè)。其次,在小臂的大側(cè)上添加6 * 10 * 4銅套,并且應(yīng)注意軸承襯套,我們應(yīng)確保其稍微伸入小臂的內(nèi)側(cè),另一側(cè)是用小臂水平。最后,我們應(yīng)放一些膠水以固定軸承和軸承襯套。
步驟8:將C軸與小臂和小臂驅(qū)動部件組裝在一起 首先,在C軸和帶軸承襯套的小臂側(cè)面之間放置兩個1毫米的墊圈。其次,將φ6* 12軸穿過孔,然后用兩個卡扣將其固定。第三,在C軸和小臂驅(qū)動部件之間放置一個1毫米的墊圈,然后將φ6* 12軸穿過孔并固定有兩個快照。完成這些步驟后,應(yīng)使用兩個M 2.5 * 10螺釘將聯(lián)軸器與小臂驅(qū)動器部件固定在一起。現(xiàn)在,我們完成了Dobot臂的主要部分。
步驟9:用小臂和小軸組裝主臂 此步驟可能會有些復(fù)雜,因此在組裝這些零件時應(yīng)格外小心。首先,我們使用兩個M2.5螺釘將聯(lián)軸器與主臂固定,并確保聯(lián)軸器在主臂的左側(cè)。 其次,將一個按扣固定在φ6* 42軸上,并將其放入手臂綁架裝飾板中,然后將其與主臂組裝在一起。 第三,在軸上放兩個0.7毫米的墊圈,并在左小臂上加上軸承襯套的一面。 第四,將步驟6中的精加工軸部分添加到φ6* 42軸,并確保帶套筒的三角形連接部分與φ6* 42軸連接。 第五,將在步驟8中完成的C軸小臂添加到φ6* 42軸,并確保套筒與該軸連接,并且?guī)?lián)軸器的小臂驅(qū)動部件在下面,并在φ6上添加兩個0.7 mm墊圈* 42右小臂軸。 第六,用φ6* 42軸固定右主臂,然后將主臂綁架裝飾板與主臂放在一起,然后按一下就擰緊。
步驟10:完成主要零件的組裝 現(xiàn)在,我們將四個φ6* 2小圓形塊放入手臂綁架裝飾板上的孔中,然后添加一些膠水將其固定。完成后,我們將把臂頭與小臂組裝在一起。首先,在臂頭的左側(cè)和右側(cè)分別放置一個0.7mm的墊圈,然后放置φ6* 30軸。最后,使用兩個卡扣固定它們,并使用約32個銅柱和M3 * 5螺釘固定主臂和小臂,我們都完成了組裝Dobot臂主要部分的工作。
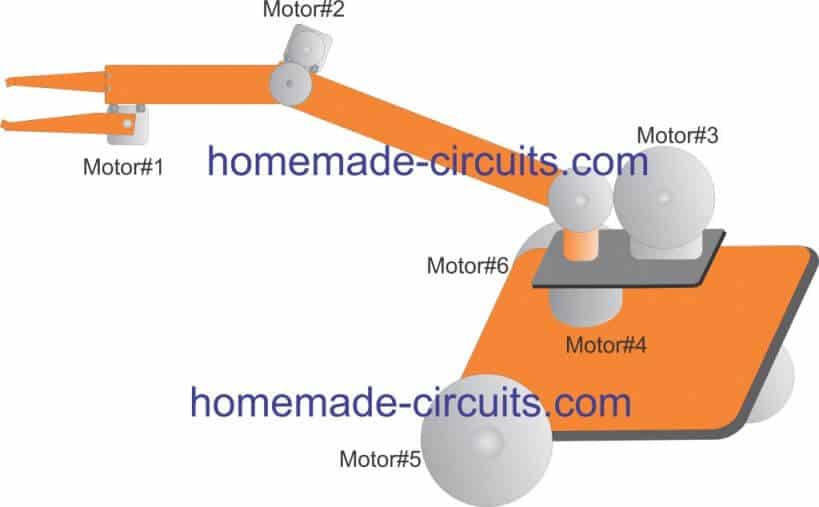
步驟11:建立底墊和底馬達 用4個M3螺釘固定軸承墊環(huán)和Dobot臂的基座,然后將大推力軸承放在墊上。用4顆M4 * 6螺釘將電動機墊與DB-E02步進電動機組裝在一起,然后將聯(lián)軸器與步進電動機固定。用兩個螺絲將步進電機固定在底座上。我們必須小心聯(lián)軸器,以確保我們可以穩(wěn)定地擰緊電動機,以使聯(lián)軸器的下端與電動機軸的倒角邊緣保持水平。
步驟12:建立左右支撐 現(xiàn)在,讓我們分別將左右DB-E01步進電機與聯(lián)軸器分別安裝在主臂和小臂驅(qū)動部件上,并用兩個M3螺釘將它們固定。我們用8 M4 * 8螺絲將電動機支架固定在底座上。完成上述工作后,我們終于完成了Dobot臂的機械部分。 Dobot手臂可以通過改變末端執(zhí)行器來完成許多事情。我們可能會制作書寫和繪圖Dobot,激光切割,CNC Dobot和3D繪畫Dobot臂。
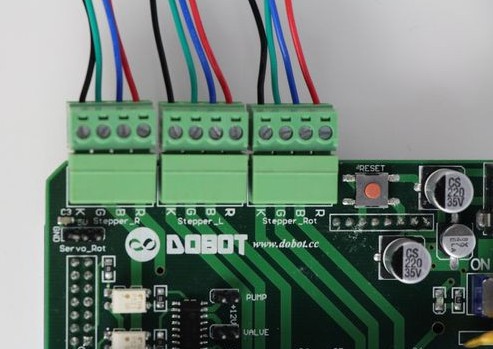
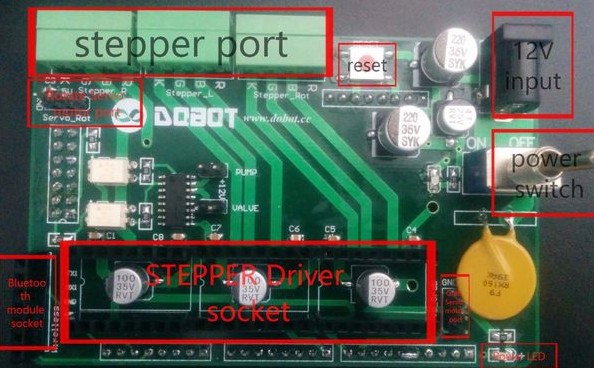
步驟13:連接電路 完成Dobot臂的機械部分后,我們應(yīng)該連接Arduino控制部分的電路。 首先,將Dobot防護罩連接到Arduino MEGA2560,如圖1所示。 其次,將電機驅(qū)動器插入相應(yīng)的接口,如上圖所示。插入后,您將獲得下圖所示的內(nèi)容。注意旋鈕的方向,請勿反向插入,否則在通電后會燃燒。 第三,插入步進電機端子。“ Steppter_R”端子用于大臂驅(qū)動電機,“ Stepper_L”連接到小臂驅(qū)動電機,“ Stepper_Rot”用于連接底盤的電機的旋轉(zhuǎn)。板上絲印“ RBGK”是指分別與電動機“紅色,藍色,綠色,黑色”連接。請勿切換四線的位置,因為它們已在出廠時預(yù)設(shè)。 第四,將12V電源適配器插入圖1(c)所示的插座,請注意,您需要將電源線連接到上述屏蔽端子,而不是Arduino MEGA2560端子。
步驟14:將激光切割頭控制器與繼電器或3D打印頭和Bowden擠出機組裝在一起。
最后大功告成
責(zé)任編輯:pj
-
電動機
+關(guān)注
關(guān)注
75文章
4156瀏覽量
98344 -
步進電機
+關(guān)注
關(guān)注
152文章
3161瀏覽量
149244 -
聯(lián)軸器
+關(guān)注
關(guān)注
1文章
81瀏覽量
7526
發(fā)布評論請先 登錄
多功能移動電源箱的設(shè)計方案
多功能貼片機的機械結(jié)構(gòu)
【資料推薦】基于Arduino的PS2機械臂遙控小車(L298N)傻瓜教程
工業(yè)機械臂的相關(guān)資料推薦
求一種基于stm32的機械臂循跡避障小車設(shè)計方案
如何通過arduino單片機和機械臂零件設(shè)計一個手柄操控自學(xué)習(xí)機械臂模型?
汽車多功能控制開關(guān)的設(shè)計方案參考
簡易Arduino機械臂DIY圖解
工業(yè)機械臂

基于Arduino UNO的可編程機械臂
使用Arm link軟件控制Arduino機械臂
如何使用Arduino制作無線機械臂?
多功能復(fù)合機器人設(shè)計方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論