") 關(guān)于無刷無霍爾BLCD電機控制解析
關(guān)于無刷無霍爾BLCD電機控制解析

電子電路|關(guān)于無刷無霍爾BLCD電機控制解析
1.概述
無霍爾的BLDC控制方案與有霍爾BLDC的基本原理相似,都是用所謂“六步換向法”,根據(jù)轉(zhuǎn)子當前的位置,按照一定的順序給定子繞組通電使BLDC電機轉(zhuǎn)動。
所不同的是無霍爾BLDC不需要霍爾效應傳感器,通過檢測定子繞組的反電動勢過零點來判斷轉(zhuǎn)子當前的位置。與有霍爾的方案相比,最明顯的優(yōu)點就是降低了成本、減小了體積。且電機引線從8根變?yōu)?根,使接線調(diào)試都大為簡化。
另外,霍爾傳感器容易受溫度和磁場等外界環(huán)境的影響,故障率較高。因此,無霍爾BLDC得到越來越多的應用,在很多場合正逐步取代有霍爾BLDC。 本文介紹三相BLDC電機的無霍爾控制理論。根據(jù)特定的應用場合,具體的實現(xiàn)方法會有所不同。
2.BLDC電機結(jié)構(gòu)及驅(qū)動方式簡介
一個簡單的BLDC的構(gòu)造如圖1所示。電機外層是定子,包含電機繞組。多數(shù)BLDC都有三個Y型連接的繞組,這些繞組中的每一個都是由許多線圈互連組成的。
電機內(nèi)部是轉(zhuǎn)子,由圍繞電機圓周的磁性相反的磁極組成。圖1顯示了僅帶有兩個磁極(南北磁極)的轉(zhuǎn)子,在實際應用中,大多數(shù)電機的轉(zhuǎn)子具有多對磁極。
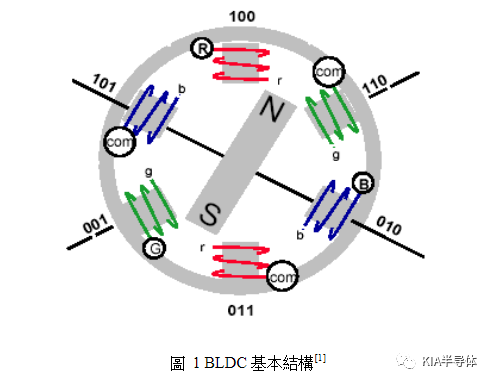
圖1BLCD基本結(jié)構(gòu)
BLDC電機驅(qū)動電路的基本模型如圖2所示。通過開關(guān)管Q0~Q5來控制電機三相繞組的通電狀態(tài),開關(guān)管可以為IGBT或者功率MOS管。其中位于上方即與電源正端連接的開關(guān)管稱為“上橋”,下方即與電源負端連接的開關(guān)管稱為“下橋”。
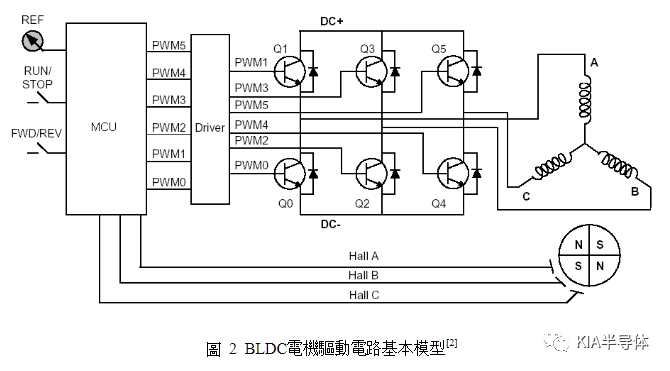
圖2BLCD電機驅(qū)動電路基本模型
例如,若Q1、Q4打開,其它開關(guān)管都關(guān)閉,則電流從電源正端經(jīng)Q1、A相繞組、C相繞組、Q4流回電源負端。流過A、C相定子繞組的電流會產(chǎn)生一個磁場,由右手定則可知其方向與B相繞組平行。由于轉(zhuǎn)子是永磁體,在磁場力的作用下會向著與定子磁場平行的方向旋轉(zhuǎn),即轉(zhuǎn)到與B相繞組平行的位置,使轉(zhuǎn)子的北磁極與定子磁場的南磁極對齊。 類似地,打開不同的上、下橋臂MOS管組合,就可控制電流的流向,產(chǎn)生不同方向的磁場,使永磁體轉(zhuǎn)子轉(zhuǎn)到指定的位置。
要使BLDC電機按指定的方向連續(xù)轉(zhuǎn)動,就必須按一定的順序給定子繞組通電。從一種通電狀態(tài)到另一種通電狀態(tài)的切換稱為“換相”,例如從AB通電變化到AC通電。換相使轉(zhuǎn)子旋轉(zhuǎn)到下一個位置。上下橋臂各3個開關(guān)管,共六種組合,因此每60°變化一次,經(jīng)過六步換相就能使電機旋轉(zhuǎn)一個電氣周期。這就是所謂的“六步換相法”。
要使轉(zhuǎn)子具有最大的轉(zhuǎn)矩,理想的情況是使定子磁場與轉(zhuǎn)子磁場方向垂直。但是實際上由于定子磁場方向每60°才變化一次,而轉(zhuǎn)子在一直不停旋轉(zhuǎn),不可能時刻使它們保持90°的相位差。最優(yōu)化的方法就是在每次換相時使定子磁場領(lǐng)先轉(zhuǎn)子磁場方向120°電角度,這樣在接下來轉(zhuǎn)子旋轉(zhuǎn)60°的過程中,定子磁場與轉(zhuǎn)子磁場方向的夾角從120°變化到60°,轉(zhuǎn)矩的利用率最高。 為了確定按照通電順序哪一個繞組將得電,必須知道轉(zhuǎn)子當前的位置。
在有霍爾的BLDC中,轉(zhuǎn)子的位置由定子中嵌入的霍爾效應傳感器檢測。無霍爾BLDC電機不借助位置傳感器,而是利用電機本身的特征信號來取得與位置傳感器類似的效果,其中應用最多的就是本文下一節(jié)要介紹的反電動勢法。
3.反電動勢法控制BLDC電機的原理
BLDC電機轉(zhuǎn)動時,永磁體轉(zhuǎn)子的旋轉(zhuǎn)在電機內(nèi)部產(chǎn)生變化的磁場,根據(jù)電磁感應定律,每相繞組都會感應出反電動勢(BEMF,Back Electromotive Force)。BLDC電機的BEMF波形隨轉(zhuǎn)子的位置和速度變化,整體上呈現(xiàn)為梯形。
圖3給出了電機旋轉(zhuǎn)一個電周期中電流和反電動勢的波形,其中的實線代表電流,虛線代表反電動勢,橫坐標為電機旋轉(zhuǎn)的電氣角度,根據(jù)BLDC的“六步換向”控制理論,我們知道在任意時刻三相BLDC只有兩相通電,另一相開路,三相兩兩通電,共有六種組合,以一定的順序每60°變化一次,這樣產(chǎn)生旋轉(zhuǎn)的磁場,拉動永磁體轉(zhuǎn)子隨之轉(zhuǎn)動。
這里的60°指的是電氣角度,一個電周期可能并不對應于一個完整的轉(zhuǎn)子機械轉(zhuǎn)動周期。完成一圈機械轉(zhuǎn)動要重復的電周期數(shù)取決于轉(zhuǎn)子的磁極對數(shù)。每對轉(zhuǎn)子磁極需要完成一個電周期,因此,電周期數(shù)/轉(zhuǎn)數(shù)等于轉(zhuǎn)子磁極對數(shù)。
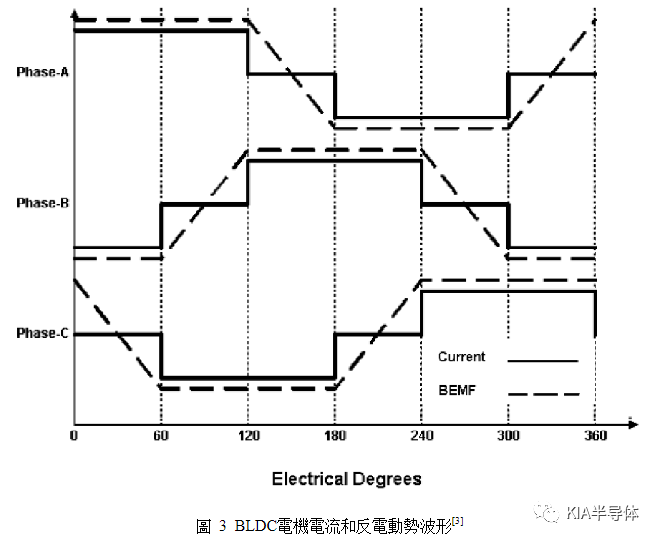
控制BLDC的關(guān)鍵就是確定換相的時刻。從圖3中可以看出,在每兩個換相點的中間都對應一個反電動勢的極性改變的點,即反電動勢從正變化為負或者從負變化為正的點,稱為過零點。利用反電動勢的這個特性,只要我們能夠準確檢測出反電動勢的過零點,將其延遲30°,即為需要換相的時刻。
4.反電動勢的檢測方法
從圖3中可以看出,每次的反電動勢過零點都發(fā)生在不通電的那一相。例如圖3中第一個60°內(nèi),A相電流為正,B相電流為負,C相電流為零,這說明電機AB相通電,電流從A相流入B相,C相為開路。反電動勢的過零點正好出現(xiàn)在C相。而且由于C相不通電,沒有電流,其相電壓就與反電動勢有直接的對應關(guān)系。因此只要在每個60°內(nèi)檢測不通電那一相的電壓,即可檢測反電動勢。
4.1 重構(gòu)虛擬中性點
由于BLDC電機的Y形連接,三相都接到公共的中性點,相電壓無法直接測量。只能測量各相的端電壓,即各相對地的電壓,然后與中性點電壓比較,當端電壓從大于中性點電壓變?yōu)樾∮谥行渣c電壓,或者從小于中性點電壓變?yōu)榇笥谥行渣c電壓,即為過零點。原理圖如圖4(a)所示。
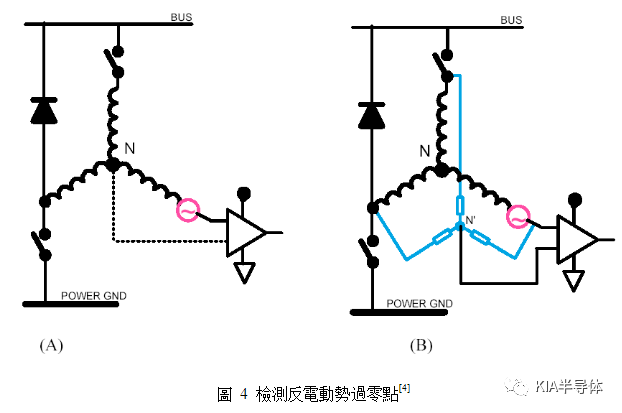
圖4檢測反電動勢過零點
但是一般的BLDC電機都沒有中性點的外接引線,因此無法直接測量中性點電壓。解決這個問題最直接的辦法就是重構(gòu)一個“虛擬中性點”,通過將三相繞組分別通過阻值相等的電壓連接到一個公共點而成,這個公共點就是虛擬中性點,如圖4(b)所示。
重構(gòu)虛擬中性點的方法有一定的實用性,但是也有很大的不足。由于BLDC電機是用PWM方式驅(qū)動,PWM在一個周期內(nèi)先輸出“ON”后,輸出“OFF”;當PWM為“ON”時電機繞組通電,為“OFF”時關(guān)斷。于是加在電機繞組兩端的電壓不斷地在高電平和低電平之間切換,其中性點電壓中包含了大量的開關(guān)噪聲。若對中性點電壓進行濾波,一方面增加了電路的復雜度,另一方面濾波電路會造成信號的相移,使檢測到的過零點比實際發(fā)生的時刻后移,無法準確地指導換向。
4.2 在PWM ON區(qū)間對反電動勢采樣
實際上,如果我們只在PWM為“ON”區(qū)間進行反電動勢的采樣,則不用直接檢測中性點電壓,而可以用總端電壓的一半來代替。推導過程如下。
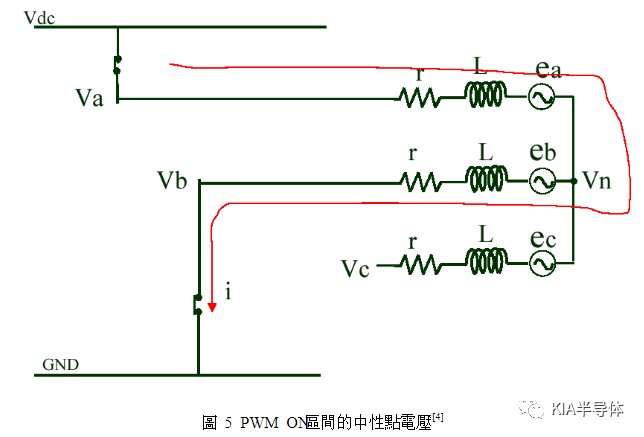
圖5PWMON區(qū)間的中性點電壓
假設采用H-PWM-L-OM的調(diào)制方式(詳見5.2節(jié):PWM調(diào)制方式),即上橋臂采用PWM調(diào)制,下橋臂恒通,圖5為PWM為“ON”時簡化的BLDC電機等效電路,電機的每相都等效為一個電阻、電感和反電動勢的串聯(lián)。假設當前為AB通電,電流從A相流入B相,C相開路。Vdc為直流母線電壓,Va、Vb、Vc分別為A、B、C相的端電壓,Vn為中性點電壓,ea、eb、ec分別為A、B、C相的反電動勢。
對A相列電壓回路方程:
Vn=Vdc?Vmos?ri?Ldidt?eaVn=Vdc?Vmos?ri?Ldidt?ea
(4.2.1)
對B相列電壓回路方程:
Vn=Vmos+ri+Ldidt?ebVn=Vmos+ri+Ldidt?eb
(4.2.2)
其中Vmos為MOS管上的壓降。以上兩式相加得:
Vn=Vdc2+ea+eb2Vn=Vdc2+ea+eb2
(4.2.3)
對于三相平衡的系統(tǒng),若忽略三次諧波,有
ea+eb+ec=0ea+eb+ec=0
(4.2.4)
將(5.2.4)代入(5.2.3)得
Vn=Vdc2+ec2Vn=Vdc2+ec2
(4.2.5)
于是可得C相端電壓為
Vc=Vn+ec=Vdc2+32ecVc=Vn+ec=Vdc2+32ec
(4.2.6)
由上式可以看出,不通電相的端電壓由該相的反電動勢迭加在Vdc/2上而形成,因此可以通過比較不通電相的端電壓與 Vdc/2上的大小來檢測反電動勢過零點。用這種方法避免了開關(guān)噪聲的影響,因此也無需增加濾波電路。
為了避免PWM剛由“OFF”變?yōu)椤癘N”時會出現(xiàn)的尖峰電壓,一般在PWM進入“ON”狀態(tài)后再延時一段時間再進行反電動勢采樣,如圖6所示。這個功能用SH79F168的PWM的中心對齊模式可以很方便地實現(xiàn)。在中心對齊模式下,PWM的周期中斷發(fā)生在“ON”狀態(tài)的中間位置。于是我們可以把PWM設為中心對齊模式,然后在周期中斷中進行反電動勢采樣。
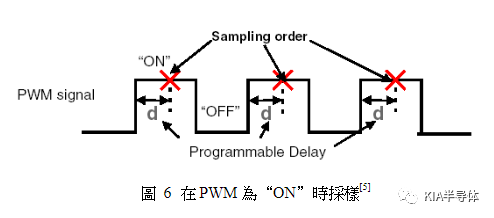
但是這種方法有一個不足,就是PWM的占空比不能太小,否則PWM為“ON”的時間太短,來不及進行AD采樣,從而無法準確判斷過零點,使電機的換相發(fā)生錯亂,無法正常運轉(zhuǎn)。在電機進入閉環(huán)控制后,PWM占空比越小轉(zhuǎn)速越低,因此這種方法不適用于要求實現(xiàn)極低轉(zhuǎn)速的場合。現(xiàn)實中要求電機能進行極低速運轉(zhuǎn)的場合不多,所以這種方法也能適用于大多數(shù)應用。
還有一個要注意的問題,就是剛換相后的一段時間內(nèi),若當前斷開相繞組在換相前是接電源正端,則其端電壓在剛換相的瞬間會迅速降落至電源負端電壓,形成一個向下的尖峰;若當前斷開相繞組在換相前是接電源負端,則其端電壓在剛換相的瞬間會迅速升高到電源正端電壓,形成一個向上的尖峰。這種現(xiàn)象在PWM占空比越大時越明顯,持續(xù)時間越長,如圖7所示。
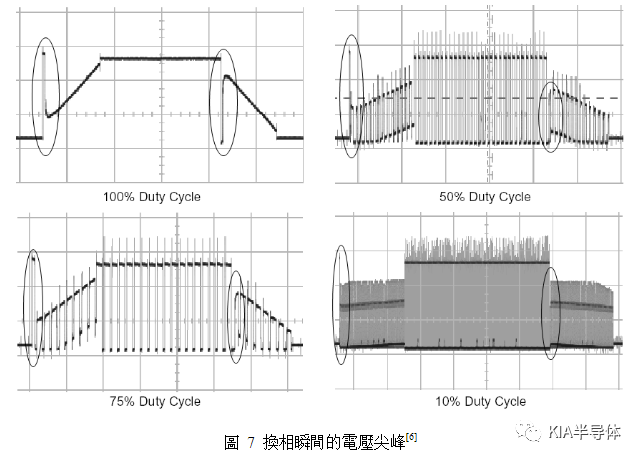
產(chǎn)生這種現(xiàn)象的原因是,在剛換相的瞬間,由于電機繞組的電感效應,斷開相繞組內(nèi)的電流不會馬上消失,根據(jù)電流的方向不同,會通過上橋臂或下橋臂的開關(guān)管的體二極管進行續(xù)流,持續(xù)一段時間才消失。電流越大,持續(xù)時間越長。
以圖5為例,若電機從圖示中的AB通電切換到AC通電,B相繞組斷開,上下橋臂的開關(guān)管都關(guān)閉。當時B相繞組中從中性點流入的電流不會馬上消失,于是通過上橋臂的體二極管續(xù)流,與電源正端短路,于是會出現(xiàn)一個正的尖峰;類似地,若電機從圖示狀態(tài)切換到CB通電,A組上下橋臂的開關(guān)管都關(guān)閉,根據(jù)電流的方向,只能通過下橋臂體二極管續(xù)流,與電源負端短路,于是出現(xiàn)一個負的尖峰。
電流越大,續(xù)流時間越長,尖峰越寬。
顯然,在剛換相的PWM周期采樣的話,很可能受到這個尖峰電壓的影響,不能反映正確的反電動勢。因此可以根據(jù)PWM占空比的大小,選擇在剛換相的一到兩個PWM周期內(nèi)不進行采樣,避開尖峰電壓。
4.3 在PWM OFF區(qū)間對反電動勢采樣
若要求能在極低速下電機也能運轉(zhuǎn),則可以采用在PWM OFF區(qū)間對反電動勢采樣的方法。
要理解下面的內(nèi)容,首先要對開關(guān)管的結(jié)構(gòu)有一個基本的認識。不論是IGBT還是功率MOS管,在其C極和E極(或者D極和S極)之間都有一個反向并聯(lián)的二極管,稱為體二極管,如圖2中的開關(guān)管所示。
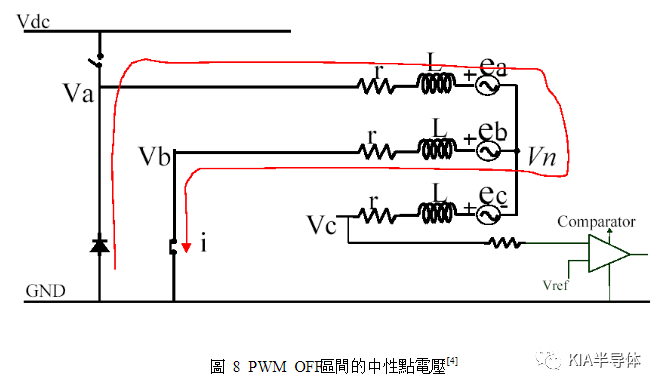
當驅(qū)動端的PWM由圖5所示的ON狀態(tài)切換到圖8所示的OFF狀態(tài)時,由于電機繞組的電感效應,繞組內(nèi)的電流不會馬上消失,于是經(jīng)過下橋臂MOS管的體二極管續(xù)流形成回路,如圖8所示。若忽略二極管的壓降,
對A相列回路方程有:
Vn=0?ri?Ldidt?eaVn=0?ri?Ldidt?ea
(4.3.1)
對B相列回路方程:
Vn=ri+Ldidt?ebVn=ri+Ldidt?eb
(4.3.2)
對于三相平衡的系統(tǒng),若忽略高次諧波,有 以上三式相加得
ea+eb+ec=0ea+eb+ec=0
(4.3.3)
以上三式相加得:
Vn=ec2Vn=ec2
(4.3.4)
于是得C相端電壓為
Vc=Vn+ec=32ecVc=Vn+ec=32ec
(4.3.5)
因此,在PWM OFF區(qū)間對斷開相繞組的端電壓進行采樣,所得電壓值與反電動勢的大小成比例,其過零點也直接反映了反電動勢的過零點。
由于這種方法需要一定的PWM OFF區(qū)間進行采樣,因此在PWM DUTY為100%時不能實施,即電機不能達到滿速。另外,在PWM剛進入OFF狀態(tài)時,由于下橋臂MOS管的體二極管的續(xù)流,斷開相的電壓會被鉗在-0.7V,因此也要先延時一段時間再進行采樣,這增大了軟件實現(xiàn)的難度。
為了有充足的采樣時間,一般在PWM占空比較大時在PWM ON區(qū)間采樣,在PWM占空比很小時在PWM OFF區(qū)間采樣。但是當PWM占空比很小時,電機轉(zhuǎn)速較低,反電動勢也會很小,因此檢測的精度會受到限制。
5 閉環(huán)調(diào)速
只要能準確地檢測反電動勢的過零點,就能方便地進行閉環(huán)調(diào)速。
5.1 閉環(huán)的建立
每一相的反電動勢都有兩種過零情況:從正變?yōu)樨摵蛷呢撟優(yōu)檎H喙灿辛N過零情況,對應六種換相狀態(tài),且這種對應關(guān)系是固定不變的。于是我們可以首先將這個對應關(guān)系寫入一個表中,程序中每檢測到一個過零點,就通過查表來決定相應的IO輸出,控制下一步哪兩相通電;然后切換到當前的斷開相繼續(xù)檢測反電動勢過零點,如此循環(huán),直至建立穩(wěn)定的閉環(huán)。
理論上,過零點總是超前換相點30°電角度,如圖3所示。因此在檢測到過零點后,要先延遲30°電角度再換相。但是在閉環(huán)調(diào)速過程中,電機旋轉(zhuǎn)一個電氣周期的時間不是固定不變的,我們無法預測在檢測到過零點后接下來的這30°電角度是多長時間。那麼在檢測到過零點之后,怎樣決定延時時間呢?
雖然我們無法預測接下來的30°電角度是多長,但是剛剛過去的這個換相周期即兩個換相點之間60°電角度的長度是可以測量的。在每次換相時將timer清零,在下一次換相時讀取的timer值就是這個換相周期的長度。于是我們可以采用近似的辦法,用上一個換相周期,即60°電角度的時間減半,作為接下來的30°電角度延時時間。這種方法是可行的,因為電機的轉(zhuǎn)速是漸變的,相鄰兩個換相周期的時間相差不會很大。
5.2 PWM調(diào)制方式
電機進入閉環(huán)后,只要通過調(diào)節(jié)PWM的占空比即可調(diào)節(jié)轉(zhuǎn)速。電機各繞組的通電和判斷都用PWM端口控制,PWM占空比大時,流過電機繞組的電流大,定子磁場就強,轉(zhuǎn)速就高;反之PWM占空比小時,電機轉(zhuǎn)速就低。
PWM調(diào)制方式有兩種:全橋調(diào)制和半橋調(diào)制。在120°導通期間,對功率逆變橋的上橋和下橋都采用PWM方式驅(qū)動,即“全橋調(diào)制”;在120°導通期間,只對功率逆變橋的上橋(或者下橋)采用PWM方式驅(qū)動,下橋(或上橋)恒通,稱為“半橋調(diào)制”。
全橋調(diào)制下MOS管的開關(guān)頻率是半橋調(diào)制方式的兩倍左右,損耗比較大,因而很少用到。半橋調(diào)制方式又有H-PWM-L-ON(在120°導通區(qū)間內(nèi)(下同),上橋臂MOS管用PWM調(diào)制,下橋臂MOS管恒通)、H-ON-L-PWM(上橋臂MOS管恒通,下橋臂MOS管用PWM調(diào)制)、PWM-ON(前60°PWM,后60°恒通)、ON-PWM(前60°恒通,后60°PWM)等多種,各有其特點,可根據(jù)具體電路和應用場合選擇特定的調(diào)制方式。其中最常用的是前兩種,實現(xiàn)起來比較簡單且能滿足一般應用。
6 BLDC電機的起動方式
BLDC電機控制的最大難點并不是位置檢測和換相,而是起動方式。由于電機繞組的反電動勢與轉(zhuǎn)速正相關(guān),當轉(zhuǎn)速很低時,BEMF也非常小以致很難準確檢測。因此電機從零轉(zhuǎn)速起動時,反電動勢法常常不能適用。必須先借助其它方法將電機拉到一定速度,使BEMF達到能夠被檢測的水平,才能切換到反電動勢法進行控制。
6.1 定位
只有先確定了靜止時轉(zhuǎn)子的位置,才能決定起動時第一次應觸發(fā)哪兩個開關(guān)管,我們把確定轉(zhuǎn)子初始位置的過程叫做定位。
6.1.1 兩相通電法定位
最簡單而常用的方法是給任意兩相通電,并控制電機電流不致過大,通電一段時間后,轉(zhuǎn)子就會轉(zhuǎn)到與該通電狀態(tài)對應的預知位置,完成轉(zhuǎn)子的定位。以圖9為例,若給AB兩相通電,則定子磁勢Fa的位置如圖所示,此時若轉(zhuǎn)子磁勢Ff在圖示位置,則轉(zhuǎn)子將順時針轉(zhuǎn)過120°電角度,與定子磁場方向?qū)R。
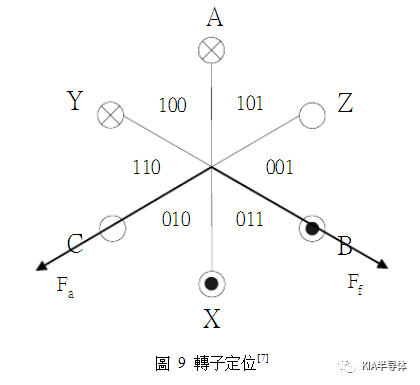
為了避免這個問題,可以先給AC、BC通電,形成的磁場方向與Fa垂直,則轉(zhuǎn)子必會轉(zhuǎn)到Fa垂直的位置(即使這時又有死鎖,轉(zhuǎn)子在與指定方向成180°角的位置,也還是與Fa垂直),然后再給AB通電,則能夠確保轉(zhuǎn)子轉(zhuǎn)到Fa方向。
6.1.2 變感檢測法定位
一種更有效的方法是利用電機繞組電感的變化來檢測轉(zhuǎn)子的初始位置。這種方法不依賴于電機的任何特性,因此對任意電機都適用,甚至改變電機的起動負載,還是能有效地實現(xiàn)定位。該方法基于如下的原理:對處于永磁體磁場中的線圈施加一個電壓,根據(jù)磁場方向的不同,產(chǎn)生的電流會增強或削弱磁場的強度,從而使線圈電感減小或增大。
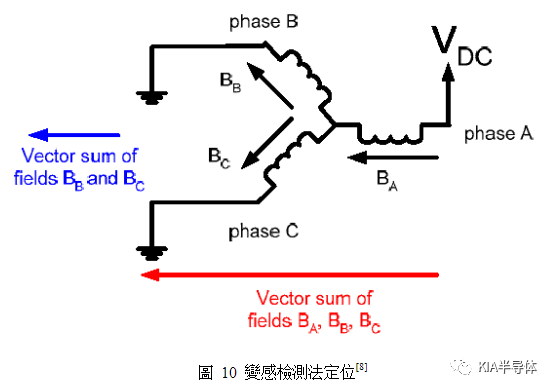
具體實現(xiàn)方法如圖10所示,先將某一相繞組連接到高電平,另外兩相接地,這時產(chǎn)生的定子磁場方向如圖所示。然后將接地的兩相繞組改接到高電平,原來接高電平的繞組接地,產(chǎn)生一個方向相反的磁場。
兩種情況的通電時間都很短,轉(zhuǎn)子并不轉(zhuǎn)動,繞組中產(chǎn)生一個電流脈衝。比較這兩種情況下電流脈衝的大小,即可比較出兩次繞組電感的大小,從而可把轉(zhuǎn)子定位在180°的范圍內(nèi)。然后換一相電機繞組重復剛才的過程,把轉(zhuǎn)子定位在另外180°的范圍內(nèi)。三相繞組各進行一次檢測,三個范圍的重合處,即可確定轉(zhuǎn)子所在的60°范圍。
由于這種方法每次繞組通電的時間都很短,因此不會擔心過流的問題。另外由于不會改變轉(zhuǎn)子位置,在轉(zhuǎn)子運行的間隙中也可以用這種方法來檢測轉(zhuǎn)子位置。
6.2 加速
明確了轉(zhuǎn)子的初始位置后,就能夠決定第一次應該打開哪幾個開關(guān)管,使哪兩相通電,控制轉(zhuǎn)子正轉(zhuǎn)或反轉(zhuǎn)到下一個位置,即第一次換相。如果這第一次換相時在斷開相繞且中產(chǎn)生的反電動勢就足夠檢測過零點,則可以直接進入閉環(huán)控制。
但是實際情況往往沒有這麼理想,在電機從靜止狀態(tài)第一次換相時的速度下,往往不足以產(chǎn)生足夠的反電動勢來實現(xiàn)過零點檢測。因此我們只能先將電機開環(huán)加速到一定的轉(zhuǎn)速,使反電動勢達到能夠檢測過零點的水平,再切換到閉環(huán)調(diào)速。
由于開環(huán)加速是很不穩(wěn)定的,必須事先設計合理的加速曲線。一種方法是先通過試驗確定加速曲線上的3~4個關(guān)鍵點,然后擬合出整條曲線的表達式。
此法的成功實現(xiàn),受電機負載轉(zhuǎn)矩、外施電壓、加速曲線及轉(zhuǎn)動慣量等諸多因素影響。通過優(yōu)化加速曲線,此法能保證電機順利起動,但是對不同電機、不同負載,所對應的優(yōu)化加速曲線不一樣,導致通用性不強。
還有一種加速方法是利用前面“定位”一小節(jié)中介紹的變感檢測法,每加速一段時間后就用這種方法檢測一次轉(zhuǎn)子位置,然后根據(jù)轉(zhuǎn)子位置調(diào)整要通電的相序,繼續(xù)加速。不斷重復檢測——加速——檢測——加速??直到電機高速運轉(zhuǎn)到需要的速度為止。
6.3 切換到閉環(huán)
如果不想花過多精力在制訂加速曲線上,也可以用另外一種方法來切換到閉環(huán)。這種方法對轉(zhuǎn)子和定子磁場的相位差沒有要求,只要電機能加速到足夠的轉(zhuǎn)速后,將三相繞組全部開路,則轉(zhuǎn)子處于不受控狀態(tài),憑藉慣性繼續(xù)轉(zhuǎn)動。這時三相繞組中都沒有電流,都可以進行反電動勢過零點檢測,而不用擔心前面提到的反電動勢過零點發(fā)生在通電相而無法檢測的情況。
在連續(xù)檢測到幾次過零點之后,就可以切換到閉環(huán)。在三相全部斷電后,電機在慣性作用下一般至少還會旋轉(zhuǎn)數(shù)十個電氣周期,其中轉(zhuǎn)速在反電動勢能夠檢測的水平之上的周期至少也有十幾個,足夠進行轉(zhuǎn)子位置檢測,因此這種方法是可行的。不足是這種方法在負載轉(zhuǎn)矩較大時不適用。
7 總結(jié)
綜合以上各部分的介紹,最后按實際執(zhí)行的順序,將無霍爾BLDC的控制過程再大致概括如下:
1、定位。主要介紹了兩相通電法和變感檢測法,從理論上講,后者是更好的方法,但是我還沒有實際驗證過。
2、加速。在我實際接觸的項目中,針對我們所用的電機,不需要加速就可以直接進入閉環(huán)。但本文提到的幾種加速方法,除了結(jié)合變感檢測法的那種,也都經(jīng)過了實踐檢驗。
3、切換到閉環(huán)。在開環(huán)階段即不斷嘗試檢測斷開相的反電動勢,若能穩(wěn)定檢測后,則可切換到閉環(huán)。
4、用反電動勢法進行閉環(huán)控制。在PWM ON區(qū)間,對斷開相繞組的端電壓進行采樣,并與直流母線電壓的一半進行比較,即可得出過零點。通過反電動勢過零點即可判斷轉(zhuǎn)子當前的位置,進而決定下一步應該哪兩相通電。
由于換相時產(chǎn)生的尖峰電壓,在剛換相的一段時間內(nèi)檢測到的反電動勢可能不準確,要根據(jù)實際情況選擇放棄前面一至兩個PWM周期的電壓采樣值。若要求實現(xiàn)極低速閉環(huán)控制,可在PWM OFF區(qū)間對斷開相端電壓采樣,采樣值的過零點即為反電動勢過零點。
5、進入閉環(huán)后,通過改變PWM的占空比即可調(diào)節(jié)電機轉(zhuǎn)速,占空比越大轉(zhuǎn)速越高。
無霍爾BLDC控制最大的難點就是起動問題。本文介紹的種種使電機起動的方法,都有其局限性,尚沒有一種可靠而通用的方法,可以實現(xiàn)不同應用條件下不同特性的無霍爾BLDC的可靠起動。我們只能根據(jù)實際條件,有針對性的選擇某一種起動方法。
但是隨著電機技術(shù)本身的發(fā)展,將來可能越來越多的無霍爾BLDC都能實現(xiàn)強度和靈敏度更高的反電動勢,從而可以直接進入閉環(huán),使控制過程大大簡化。
編輯:jq
-
傳感器
+關(guān)注
關(guān)注
2565文章
52869瀏覽量
766365 -
電機
+關(guān)注
關(guān)注
143文章
9281瀏覽量
149146 -
BLDC
+關(guān)注
關(guān)注
213文章
831瀏覽量
98240
原文標題:電子電路|關(guān)于無刷無霍爾BLCD電機控制解析
文章出處:【微信號:KIA半導體,微信公眾號:KIA半導體】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
無刷直流電機改進型直接轉(zhuǎn)矩控制研究
傳統(tǒng)路線與其利天下的分水嶺,無刷電鉆驅(qū)動方案對比--【其利天下】

【電機】了解無刷直流電機BLDC
電機:無刷直流電機的原理
無刷直流電機運行原理與基本控制方法
霍爾開關(guān)在各種電機上的應用

基于TMS320C25 DSP的梯形無刷DC電機無傳感器控制

無刷直流電機是什么?它有什么特點?
使用霍爾效應傳感器的無刷直流電機換向應用說明





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論