") 剖析華為和博世L4級(jí)代客泊車(chē)系統(tǒng)
剖析華為和博世L4級(jí)代客泊車(chē)系統(tǒng)

博世與奔馳在2018年推出第一代全自動(dòng)代客泊車(chē)AVP系統(tǒng),以場(chǎng)端為核心,第一代AVP系統(tǒng)在地面上部署了幾十個(gè)激光雷達(dá),不僅成本高且施工與部署也不太方便。2020年中期,第二代AVP系統(tǒng)用立體雙目取代激光雷達(dá),博世也在歐洲汽車(chē)電子雜志ATZ上發(fā)表文章Safety and Security Concept for an Automated Parking Service,強(qiáng)調(diào)新系統(tǒng)的安全性比激光雷達(dá)進(jìn)一步提高,不過(guò)要花35歐元才能瀏覽文章,https://link.springer.com/article/10.1007/s38311-020-0327-5。同時(shí)博世、福特與底特律地產(chǎn)開(kāi)發(fā)商Bedrock合作,在Bedrock開(kāi)發(fā)的項(xiàng)目中部署其AVP系統(tǒng)。
無(wú)獨(dú)有偶,華為于2020年底也申請(qǐng)了以立體雙目為核心的AVP專(zhuān)利,申請(qǐng)公布日是2021年的3月30日。華為也是以場(chǎng)端為核心,基本不在車(chē)端做改動(dòng)。
博世在斯圖加特機(jī)場(chǎng)的P6停車(chē)場(chǎng)部署了180個(gè)立體雙目攝像頭,同時(shí)搭建了一套服務(wù)器系統(tǒng),最終達(dá)到L4級(jí)的AVP。
上圖為斯圖加特機(jī)場(chǎng)平面圖,斯圖加特是德國(guó)第六大城市兼全國(guó)第四大城市聯(lián)合體(僅次于魯爾區(qū)、萊茵-美因區(qū)和柏林)。博世、奔馳和保時(shí)捷的總部都在斯圖加特。P6停車(chē)場(chǎng)尺寸未知,不過(guò)P14(公交停車(chē)場(chǎng))的尺寸是確定的,那就是210米長(zhǎng),37米寬,推測(cè)P6停車(chē)場(chǎng)大約70米長(zhǎng),20米寬。
博世和奔馳合作提供AVP服務(wù),全程無(wú)人操作,包括付款。除了博世和奔馳外,還有一個(gè)重要合作伙伴就是Apcoa Parking,這是歐洲最大的停車(chē)場(chǎng)運(yùn)營(yíng)企業(yè),在13個(gè)國(guó)家9500個(gè)地點(diǎn)擁有150萬(wàn)個(gè)停車(chē)位。Apcoa計(jì)劃將20%的停車(chē)位改造成AVP停車(chē)場(chǎng)。
福特、博世和Bedrock在底特律的Corktown打造了一座類(lèi)似斯圖加特P6的AVP停車(chē)場(chǎng),不過(guò)規(guī)模要大不少。
這是一座擁有450個(gè)車(chē)位,建筑面積15000平方米的立體車(chē)庫(kù),實(shí)際除了這三家,還有一個(gè)合作伙伴Rich & Associates,停車(chē)庫(kù)的設(shè)計(jì)者。
具備WiFi的車(chē)輛到達(dá)AVP停車(chē)場(chǎng)門(mén)口時(shí),車(chē)輛與停車(chē)場(chǎng)服務(wù)器經(jīng)手機(jī)確認(rèn)連接,然后停車(chē)場(chǎng)服務(wù)器根據(jù)提前存儲(chǔ)的停車(chē)場(chǎng)地圖以及立體雙目攝像頭傳遞的車(chē)位信息為車(chē)輛規(guī)劃好停車(chē)路徑,服務(wù)器接管車(chē)輛按規(guī)劃好的停車(chē)路徑行進(jìn),如果探測(cè)到4米前有障礙物或行人就會(huì)自動(dòng)剎停,服務(wù)器發(fā)送到車(chē)輛的路徑規(guī)劃命令刷新頻率大約5Hz。實(shí)際可以看做立體雙目攝像頭將整個(gè)停車(chē)場(chǎng)做了一個(gè)實(shí)時(shí)動(dòng)態(tài)的3D數(shù)學(xué)模型,停車(chē)場(chǎng)服務(wù)器根據(jù)數(shù)學(xué)模型計(jì)算出可通行路徑與路徑規(guī)劃,而L4車(chē)輛是把服務(wù)器放在車(chē)上而已。
停車(chē)服務(wù)器有兩個(gè),互相校驗(yàn)備份,保證高可靠性。
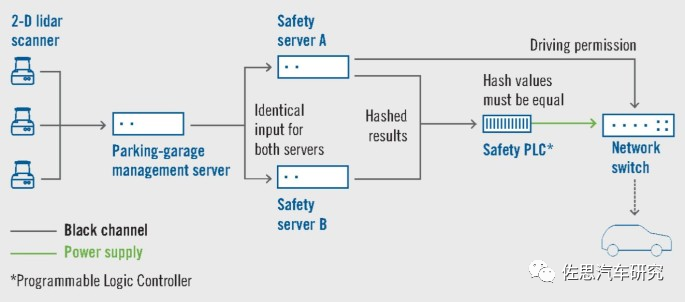
圖片來(lái)源:博世
上圖中的2D激光雷達(dá)已經(jīng)換成立體雙目。
博世天花頂立體雙目攝像頭特寫(xiě)。據(jù)說(shuō)停車(chē)場(chǎng)的空間使用率提高了20%。
這種設(shè)計(jì)需要架設(shè)停車(chē)場(chǎng)服務(wù)器,服務(wù)器的初始化技術(shù)含量比較高,成本也高。中國(guó)企業(yè)的做法一般是停車(chē)場(chǎng)服務(wù)器不搞那么復(fù)雜,停車(chē)場(chǎng)服務(wù)器提供車(chē)位信息,將車(chē)位信息發(fā)送到用戶(hù)手機(jī),讓用戶(hù)選擇車(chē)位,可以提前預(yù)約車(chē)位,按華為的設(shè)想,車(chē)位預(yù)約后,地鎖自動(dòng)升起。
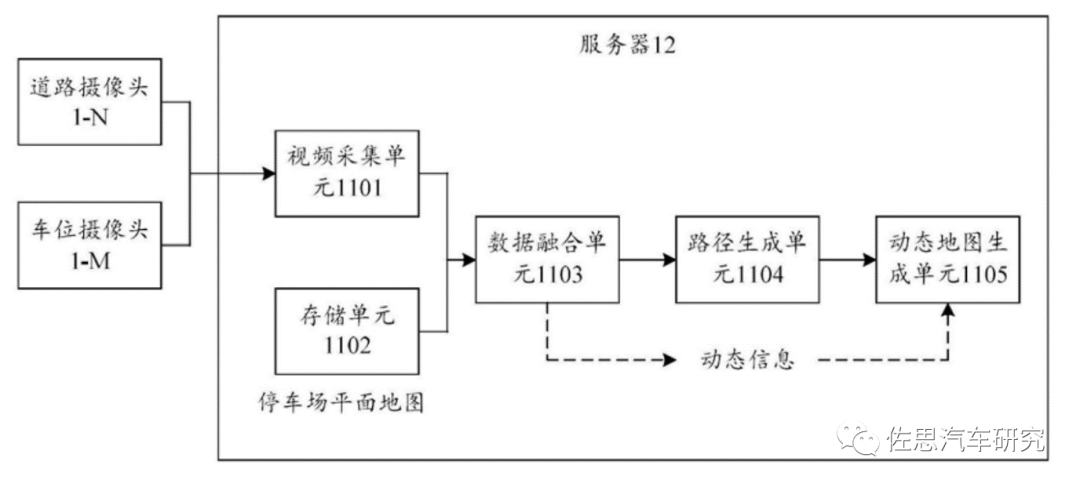
圖片來(lái)源:華為
華為的AVP自動(dòng)泊車(chē)系統(tǒng)如上圖,華為的道路攝像頭是雙目,車(chē)位攝像頭可能是單目,只需要知道車(chē)位是否被占用就行。
為什么華為和博世還有大眾和福特要用雙目做AVP系統(tǒng)傳感器的核心,而不像特斯拉那樣用單目或三目。因?yàn)槿c(diǎn):一是立體雙目系統(tǒng)不需要識(shí)別就可探測(cè)障礙物信息;二是立體雙目能夠提供高可靠性的3D空間信息;三是立體雙目U-V視差能夠識(shí)別路面凸起變化。簡(jiǎn)單來(lái)說(shuō)就是立體雙目安全系數(shù)遠(yuǎn)高于三目和單目。
以特斯拉為代表的單目和三目系統(tǒng),對(duì)深度學(xué)習(xí)高度依賴(lài),深度學(xué)習(xí)視覺(jué)感知中目標(biāo)分類(lèi)與探測(cè)是一體的,無(wú)法分割。也就是說(shuō),如果無(wú)法將目標(biāo)分類(lèi)(也可以通俗地說(shuō)是識(shí)別)就無(wú)法探測(cè)。換句話說(shuō),如果無(wú)法識(shí)別目標(biāo)就認(rèn)為目標(biāo)不存在。車(chē)輛會(huì)認(rèn)為前方無(wú)障礙物,會(huì)不減速直接撞上去。
訓(xùn)練數(shù)據(jù)集無(wú)法完全覆蓋真實(shí)世界的全部目標(biāo),能覆蓋10%都已經(jīng)是很神奇的了,更何況現(xiàn)實(shí)世界時(shí)時(shí)刻刻都會(huì)出現(xiàn)新的不規(guī)則目標(biāo)。特斯拉多次事故都是如此,比如在中國(guó)兩次在高速公路上追尾掃地車(chē)(第一次致人死亡),在美國(guó)多次追尾消防車(chē)。還有無(wú)法識(shí)別車(chē)輛側(cè)面(大部分?jǐn)?shù)據(jù)集都只采集車(chē)輛尾部圖像而沒(méi)有車(chē)輛側(cè)面圖像)以及無(wú)法識(shí)別比較小的目標(biāo)。毫米波雷達(dá)可能誤判,特別是靜止目標(biāo),如金屬井蓋、金屬天橋、金屬護(hù)欄,因此毫米波雷達(dá)會(huì)自動(dòng)過(guò)濾掉靜止目標(biāo)。此時(shí)需要雙目或激光雷達(dá),這兩類(lèi)傳感器都無(wú)需分類(lèi)即可探測(cè)。
立體雙目的深度信息是通過(guò)三角測(cè)量法獲得的,在有效距離內(nèi),精度可達(dá)厘米級(jí),誤差低于5%。當(dāng)然,激光雷達(dá)在某些情況下會(huì)比立體雙目更好。單目也可以提供推測(cè)的深度信息,單目獲取深度信息有兩種:一種很簡(jiǎn)單,深度學(xué)習(xí)訓(xùn)練,深度學(xué)習(xí)幾乎是萬(wàn)能的,什么地方都能用,但是深度學(xué)習(xí)是黑盒子,又可以叫調(diào)參的藝術(shù),可靠度和準(zhǔn)確度很低,精度不會(huì)超過(guò)亞米級(jí),誤差可能有50%,目前只在研究論文里出現(xiàn);第二種是SfM(Structure from Motion),需要至少2個(gè)攝像頭,運(yùn)算量很大,可靠度和準(zhǔn)確度比深度學(xué)習(xí)高很多,但跟立體雙目比還是差距很大,典型代表就是Mobileye用在吉利上的SuperVision。
Mobileye有關(guān)SfM的專(zhuān)利主要有三個(gè),一個(gè)是2014年的Dense Structure from motion,另一個(gè)是2017年的Stereo Auto-Calibration From Structure-from-motion,還有一個(gè)是2020年的Comfort Responsibility Sensitivity Safety Model(長(zhǎng)達(dá)197頁(yè)),其中雖未提及SfM具體算法,但描述了SfM Stereo Image的處理流程。最終Mobileye還是倒向激光雷達(dá),如果FMCW激光雷達(dá)開(kāi)發(fā)成功,SfM顯得性?xún)r(jià)比很低。
地下停車(chē)場(chǎng)通常都是有坡度的,單目和三目是無(wú)法識(shí)別路面的,特別是有坡度的路面更是完全無(wú)法檢測(cè),因?yàn)樗羌?D平面的傳感器,但立體雙目可以很輕松實(shí)現(xiàn)。奔馳的魔毯系統(tǒng)就是用立體雙目檢測(cè)道路起伏,提前讓?xiě)覓煜到y(tǒng)做出調(diào)整,也是唯一真正的自適應(yīng)懸掛。
雙目除了常用的視差圖還有一個(gè)U-V視差。它是在原始視差圖上延伸出來(lái)的。
上圖為典型的U-V視差圖。U-V視差圖可以判斷路面以及建筑物,準(zhǔn)確度遠(yuǎn)高于深度學(xué)習(xí)的方法。
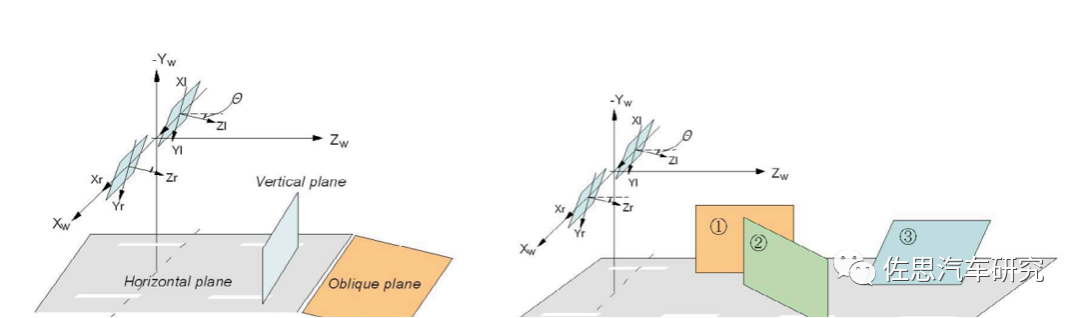
圖片來(lái)源:博世
U-V視差也是自動(dòng)駕駛可行駛空間的關(guān)鍵,是導(dǎo)出路面的關(guān)鍵。
博世和華為的系統(tǒng)對(duì)車(chē)輛要求都不高,包括線控制動(dòng),電動(dòng)助力轉(zhuǎn)向大部分車(chē)輛都配備,只有EPB (電子駐車(chē)系統(tǒng)),國(guó)產(chǎn)車(chē)普及率不高,實(shí)際就是一套小功率的輪轂內(nèi)電磁制動(dòng)系統(tǒng)。國(guó)產(chǎn)車(chē)有些是電子手剎,只是用電機(jī)代替了手扳。
華為依仗龐大的手機(jī)族群,又在基礎(chǔ)設(shè)施領(lǐng)域耕耘多年,IoT方面具備絕對(duì)優(yōu)勢(shì),在AVP方面優(yōu)勢(shì)很大,博世則在與車(chē)企合作方面優(yōu)勢(shì)非常明顯。不過(guò)在中國(guó),開(kāi)發(fā)商或停車(chē)場(chǎng)業(yè)主才是有決定權(quán)的一方。
編輯:jq
-
華為
+關(guān)注
關(guān)注
216文章
35197瀏覽量
255790 -
服務(wù)器
+關(guān)注
關(guān)注
13文章
9784瀏覽量
87887 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4231瀏覽量
192774 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5560瀏覽量
122767
原文標(biāo)題:華為和博世L4級(jí)代客泊車(chē)系統(tǒng)剖析:立體雙目為核心
文章出處:【微信號(hào):zuosiqiche,微信公眾號(hào):佐思汽車(chē)研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
比亞迪推L4級(jí)智能泊車(chē)!企業(yè)兜底,技術(shù)碾壓競(jìng)對(duì)?
比亞迪率先實(shí)現(xiàn)媲美L4級(jí)智能泊車(chē)
華為數(shù)據(jù)中心自動(dòng)駕駛網(wǎng)絡(luò)通過(guò)EANTC歐洲高級(jí)網(wǎng)絡(luò)測(cè)試中心L4級(jí)自智網(wǎng)絡(luò)測(cè)評(píng)

佑駕創(chuàng)新車(chē)規(guī)級(jí)L4自動(dòng)駕駛小巴獲項(xiàng)目定點(diǎn)
華為ADN L4解決方案斬獲FutureNet World 2025自智網(wǎng)絡(luò)最佳實(shí)踐獎(jiǎng)

華為AI重塑核心網(wǎng)運(yùn)維模式助力運(yùn)營(yíng)商實(shí)現(xiàn)數(shù)智化轉(zhuǎn)型,邁向AN L4
佑駕創(chuàng)新成功交付L4級(jí)自動(dòng)駕駛小巴項(xiàng)目
佑駕創(chuàng)新L4級(jí)自動(dòng)駕駛小巴成功交付
華為乾崑智駕泊車(chē)代駕VPD全球首個(gè)機(jī)場(chǎng)商用試點(diǎn)發(fā)布
華為乾崑VPD泊車(chē)代駕深圳機(jī)場(chǎng)商用試點(diǎn)發(fā)布
伊予鐵巴士公司啟動(dòng)L4級(jí)自動(dòng)駕駛公交商業(yè)運(yùn)營(yíng)
當(dāng)春節(jié)駕車(chē)返鄉(xiāng)擁有了L3/L4級(jí)自動(dòng)駕駛
l4級(jí)別自動(dòng)駕駛的特點(diǎn)是什么
經(jīng)緯恒潤(rùn)全冗余R-EPS助力L4級(jí)自動(dòng)駕駛落地

L4算法公司如何助力城市NOA加速落地?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論