") 求一種采用空間投影的點(diǎn)云分割方法
求一種采用空間投影的點(diǎn)云分割方法

點(diǎn)云分割是點(diǎn)云處理的一個關(guān)鍵環(huán)節(jié),其分割質(zhì)量決定了目標(biāo)測量、位姿估計(jì)等任務(wù)的精確與否。
1、引言
目前,以立體成像技術(shù)為核心的立體相機(jī)獲得了多樣性發(fā)展,例如雙目相機(jī)、單目結(jié)構(gòu)光 相機(jī)、 TOF(timeofflight)相機(jī)等,其獲得的深度圖像(RGB-D)是在RGB 數(shù)據(jù)基礎(chǔ)上融合了深度數(shù)據(jù), 在參考相機(jī)內(nèi)參下深度圖像可轉(zhuǎn)化為點(diǎn)云數(shù)據(jù)。根據(jù)立體相機(jī)的三維數(shù)據(jù)重建感興趣區(qū)域(ROI),目標(biāo)區(qū)域表面信息和背景信息的數(shù)據(jù)是混合在一起的,這給后續(xù)目標(biāo)的三維測量和分析處理帶來了一 定難度,因此采用點(diǎn)云分割技術(shù)進(jìn)行目標(biāo)區(qū)域和背 景點(diǎn)云分離是必要的途徑。
點(diǎn)云分割就是將數(shù)據(jù)分割成若干個互不相交的子集。點(diǎn)云分割的問題一般分為4類: 1)具有 人類視覺意義的形狀確定 2)獲取點(diǎn)云中與空間方位無關(guān)的幾何特征 3)點(diǎn)云中各個形狀邊界的確定 4)具有一致性的分割結(jié)果。 目前的點(diǎn)云分割方法分為兩類,即主要處理點(diǎn)與點(diǎn)之間拓?fù)潢P(guān)系的傳統(tǒng)方法和基于深度學(xué)習(xí)的方法。
立體相機(jī)與激光雷達(dá)的不同之處在于拍攝場景信息所得的RGB-D數(shù)據(jù)具有物體表面的顏色紋理信息。不同于點(diǎn)云拓?fù)潢P(guān)系和深度學(xué)習(xí)的點(diǎn)云分割,本文介紹了一種采用點(diǎn)云空 間投影的RGB-D點(diǎn)云分割技術(shù),首先介紹采用圖像閾值的點(diǎn)云分割和利用靶標(biāo)世界坐標(biāo)系的點(diǎn)云分割兩種基礎(chǔ)方法, 將在世界坐標(biāo)系中的靶標(biāo)作為參考旋轉(zhuǎn)點(diǎn)云,并將其投影至坐標(biāo)系水平面(XOY)上,利用圖像的形態(tài)學(xué)獲得目標(biāo)顯著區(qū)域,進(jìn)而獲得目標(biāo)點(diǎn)云數(shù)據(jù)。
2、圖像閾值與點(diǎn)云關(guān)系模型
2.1 相機(jī)數(shù)學(xué)模型
攝像機(jī)數(shù)學(xué)模型采用小孔成像的原理,在笛卡兒空間中建立景物點(diǎn)與成像點(diǎn)之間的映射關(guān)系。令點(diǎn)P=(Xw,Yw,Zw)為像素p(u,v)投射在世界坐標(biāo)系中的點(diǎn),(u,v,1)是點(diǎn)p在像素坐標(biāo)系中的齊次坐標(biāo);(Xw,Yw,Zw,1)是點(diǎn) P 在世界坐標(biāo)系中的 齊次坐標(biāo)。那么兩個坐標(biāo)的關(guān)系為
2.2 圖像閾值與點(diǎn)云的關(guān)系模型
RGB-D數(shù)據(jù)來自立體相機(jī)中RGB相機(jī)和 Depth相機(jī),由于相機(jī)空間視角不同,兩組原始數(shù)據(jù)中RGB數(shù)值與深度數(shù)值不匹配。在標(biāo)定立體相機(jī)的外參數(shù)后,建立RGB像素值與 Depth數(shù)值兩者之間的一一對應(yīng)關(guān)系。采用圖像閾值的點(diǎn)云分割基本思路:根據(jù)圖像像素和點(diǎn)云的對應(yīng)關(guān)系進(jìn)行圖像分割,獲得目標(biāo)區(qū)域點(diǎn)云。
3、采用空間投影的點(diǎn)云分割方法
3.1 建立靶標(biāo)世界坐標(biāo)系 立體相機(jī)中依據(jù) RGB 相機(jī)和Depth相機(jī)的外參數(shù),可以把Depth相機(jī)生成的點(diǎn)云轉(zhuǎn)換到相機(jī)坐標(biāo)系下。參考棋盤格建立世界坐標(biāo)系。利用靶標(biāo)世界坐標(biāo)系可實(shí)現(xiàn)一定程度的點(diǎn)云分割,其基本思路是:由于場景三維點(diǎn)云的空間尺度與世界坐標(biāo)系的空間尺度具有一致性,通過建立世界坐標(biāo)系并確定待測物體在世界坐標(biāo)系中的空間區(qū)域,可分割映射到世界坐標(biāo)系里的點(diǎn)云。
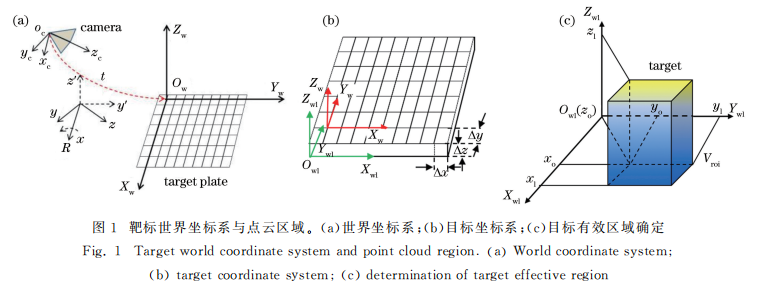
如圖1(a)所示,pc(xc,yc,zc)為相機(jī)坐標(biāo)系中的點(diǎn)云,Pw (Xw,Yw,Zw)是世界坐標(biāo)系中的點(diǎn)云,由(1)式可得

如圖1(b)所示,由于靶標(biāo)板(標(biāo)定板)所指定的 坐標(biāo)系相對于棋盤格角點(diǎn)所建立的世界坐標(biāo)系有一 定的偏移,這里采用補(bǔ)償?shù)姆绞竭M(jìn)行坐標(biāo)系校正。設(shè)靶標(biāo)的厚度為 Δz,世界坐標(biāo)系原點(diǎn)在待測區(qū)域的X和Y軸的偏移分別為Δx 和Δy,補(bǔ)償偏移量Δl3×1=[Δx Δy Δz]T,則(6)式可進(jìn)一步表示為
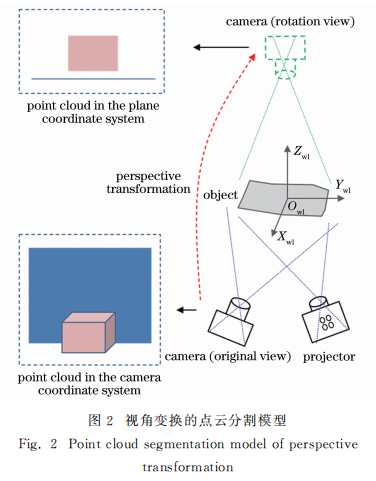
3.2 采用空間投影的點(diǎn)云分割方法 參考前述的圖像閾值、靶標(biāo)世界坐標(biāo)系與點(diǎn)云區(qū)域的關(guān)系,為了突出目標(biāo)區(qū)域以實(shí)現(xiàn)點(diǎn)云分割,可將點(diǎn)云的觀測視角旋轉(zhuǎn)至俯視角度(鳥瞰視角),如圖2所示,這樣可減少背景點(diǎn)云信息,使目標(biāo)點(diǎn)云呈現(xiàn)更多信息,采用相機(jī)模型將點(diǎn)云投影至相機(jī)的圖像像素。在得到旋轉(zhuǎn)投影后場景的二維圖像后,采用圖像閾值分割的方法可快速地得到目標(biāo)閾值范圍,還原后得到場景分割的目標(biāo)點(diǎn)云。
參考(6)式得到世界坐標(biāo)系中的點(diǎn)云 Pwl(Xwl, Ywl,Zwl),將其變換到場景點(diǎn)云的俯視角時,有:

根據(jù)單目攝像機(jī)模型,可以得到點(diǎn)云對應(yīng)的二值圖像坐標(biāo)為:
4、結(jié)果對比
4.1 場景點(diǎn)云獲取
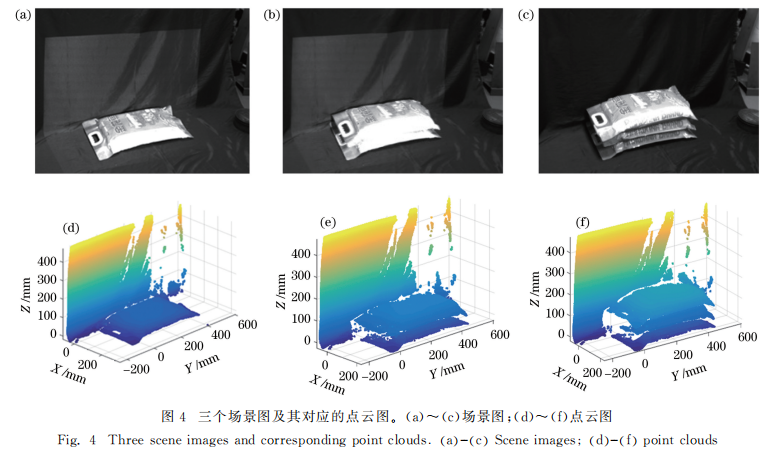
為了驗(yàn)證算法的可行性,搭建系統(tǒng)硬件,如圖3 所示,系統(tǒng) 包 括 靶 標(biāo) (尺 寸 規(guī) 格:棋 盤 格 角 點(diǎn) 數(shù) 為 5×7,方格大小為 34 mm×34mm)、雙目攝像機(jī) (MER-500-7UM)、8mm定焦鏡頭、投影儀(BenQ) 和上位機(jī)[2.53GHzIntel(R)Core (TM)2Duo CPU,2GBRAM]。 待測場景如圖4(a)~(c)所示, RGB-D點(diǎn)云采用投影儀投射格雷碼編碼光柵和攝像機(jī)拍攝其光柵解碼所得,其中包含1幅明、暗視場 圖像以及40幅正交格雷碼編碼光柵圖像。建立三個層疊的米袋場景(場景1#、2#、3#),分別獲取整個場景并分割其米袋區(qū)域點(diǎn)云數(shù)據(jù)。根據(jù)張氏標(biāo)定方法建立的靶標(biāo)坐標(biāo)系,獲得外參數(shù)矩陣[R3×3t3×1],將三個場景點(diǎn)云映射到世界坐標(biāo)系中,場景圖片在靶標(biāo)坐標(biāo)系中的點(diǎn)云如圖 4(d)~(f)所示。
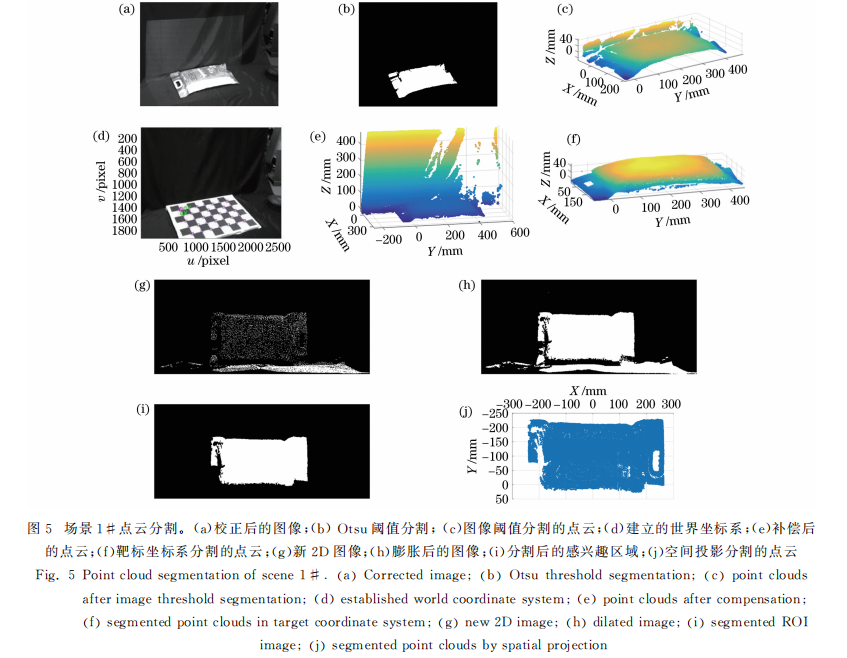
利用圖像閾值與點(diǎn)云關(guān)系實(shí)現(xiàn)點(diǎn)云分割,首先獲得場景RGB圖,利用標(biāo)定參數(shù)進(jìn)行徑向與切向畸變校正,結(jié)果如圖5(a)所示;利用最大類間方差法 (Otsu)對校正后的場景圖進(jìn)行處理,以突出感興趣區(qū)域,結(jié)果如圖5(b)所示。
其次,對感興趣區(qū)域中的空洞進(jìn)行形態(tài)學(xué)處理,即空洞填充;建立點(diǎn)云坐標(biāo)與圖像像素坐標(biāo)的映射關(guān)系,并判斷所映射的點(diǎn)云是否在圖像感興趣區(qū)域里。最后分割出映射到感興趣區(qū)域的點(diǎn)云數(shù)據(jù),如圖5(c)所示。 采用靶標(biāo)坐標(biāo)系與點(diǎn)云區(qū)域?qū)崿F(xiàn)點(diǎn)云分割,首先測量并確定目標(biāo)物體的待放置空間區(qū)域,把靶標(biāo)板放置在待測量物體區(qū)域內(nèi),根據(jù)靶標(biāo)板手工測量或設(shè)計(jì)的規(guī)格參數(shù)確定 X 軸偏移量 Δx、Y 軸偏移 量 Δy 和靶標(biāo)板厚度 Δz。其次,在攝像機(jī)標(biāo)定過程 中,確定世界坐標(biāo)系 X 軸和Y 軸方向,如圖5(d)所示;并利用(6)、(7)式把相對于攝像機(jī)坐標(biāo)系的點(diǎn)云映射到依據(jù)靶標(biāo)板所建立的世界坐標(biāo)系中,如圖5(e)所示。最后,利用參考測量限定目標(biāo)物體放置區(qū)域,實(shí)現(xiàn)目標(biāo)點(diǎn)云分割,如圖5(f)所示。 在圖像閾值和靶標(biāo)世界坐標(biāo)系的基礎(chǔ)上可采用點(diǎn)云空間投影進(jìn)行點(diǎn)云分割,首先測量并確定目標(biāo)物體的待放置空間區(qū)域,把靶標(biāo)放置在待測量物體的區(qū)域內(nèi),確定X軸偏移量Δx、Y 軸偏移量 Δy 和靶標(biāo)板厚度 Δz。其次,在攝像機(jī)標(biāo)定過程中,確定世界坐標(biāo)系X 軸和Y 軸方向。利用(9)式把點(diǎn)云視角變換至場景俯視角度,利用(13)、(14)式把三維點(diǎn)云映射到二維圖像中,如圖5(g)所示。 利用形態(tài)學(xué)對獲得的二維圖像進(jìn)行膨脹處理,如圖5(h)所示, 利 用連通域方法進(jìn)行感興趣區(qū)域圖像分割,如圖5(i) 所示。最后根據(jù)建立的點(diǎn)云與像素之間的映射關(guān)系, 還原圖像閾值分割所對應(yīng)的點(diǎn)云區(qū)域,如圖5(j)所示。
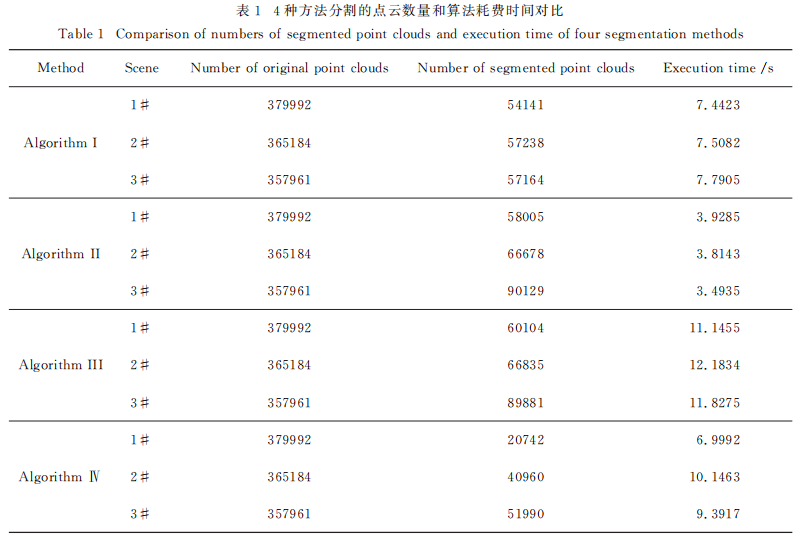
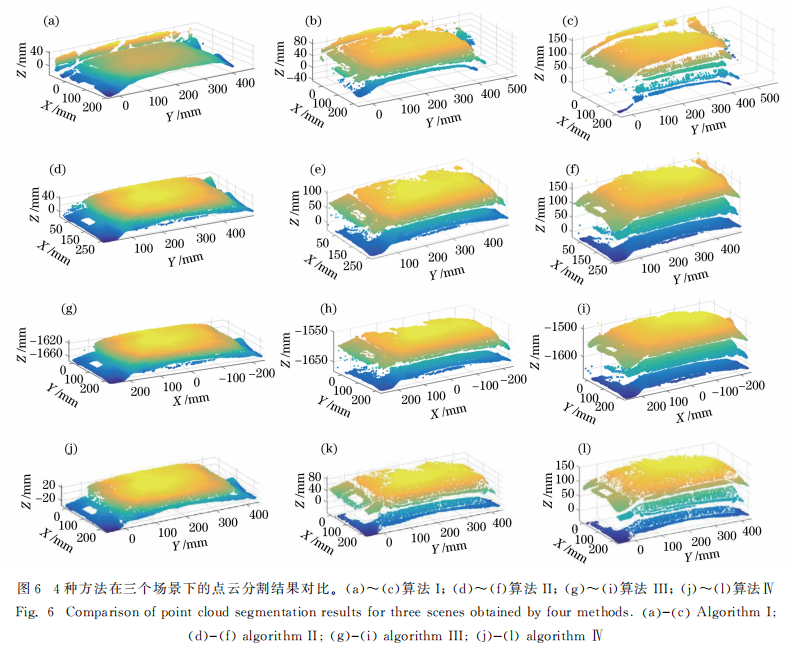
4.2 結(jié)果對比分析 點(diǎn)云分割實(shí)驗(yàn)分別采用圖像閾值分割 (算法 I)、靶標(biāo)坐標(biāo)系(算法II)、空間投影(算法III)以及與 Halcon中的基于區(qū)域的方法(算法Ⅳ)進(jìn)行對比分析,對不同算法的參考點(diǎn)云總數(shù)和分割后點(diǎn)云數(shù) 進(jìn)行對比,如表1所示。
4種方法實(shí)現(xiàn)的點(diǎn)云分割(場景1#~3#的點(diǎn)云區(qū)域)結(jié)果如圖6所示。利用圖像閾值和點(diǎn)云映 射關(guān)系實(shí)現(xiàn)的點(diǎn)云分割如圖6(a)~(c)所示。立體相機(jī)的外參數(shù)誤差和相機(jī)非線性映射關(guān)系等導(dǎo)致攝像機(jī)坐標(biāo)系下的點(diǎn)云坐標(biāo)與圖像像素坐標(biāo)的對應(yīng)關(guān)系存在一定的誤差。與此同時,點(diǎn)云分割密度直接受圖像閾值分割好壞的影響,在場景復(fù)雜且感興趣區(qū)域閾值分割較差的情況下,點(diǎn)云分割不理想。采用靶標(biāo)世界坐標(biāo)系和點(diǎn)云區(qū)域模型實(shí)現(xiàn)的點(diǎn)云分割 如圖6(d)~ (f)所示。
根據(jù)靶標(biāo)坐標(biāo)系的點(diǎn)云分割,需要測量感興趣區(qū)域的物理空間區(qū)域和應(yīng)用攝像機(jī)RGB圖像建立相應(yīng)的參考坐標(biāo)系,根據(jù)測量目 標(biāo)區(qū)域范圍可在不改變點(diǎn)云密度的情況下快速有效 地分割出目標(biāo)物點(diǎn)云。基于空間投影的點(diǎn)云分割方法,在目標(biāo)物區(qū)域建立世界坐標(biāo)系,利用坐標(biāo)系變換 改變目標(biāo)物點(diǎn)云投射視角,以突出目標(biāo)物的閾值特征,實(shí)現(xiàn)點(diǎn)云分割,如圖6(g)~(i)所示。基于空間投影的點(diǎn)云分割結(jié)果邊界清晰且質(zhì)量較佳,但由于其融合圖像閾值和靶標(biāo)坐標(biāo)系算法,其執(zhí)行速度相 對慢一些。Halcon視覺開發(fā)平臺中基于區(qū)域的點(diǎn)云分割方法,采用點(diǎn)云三角化后,根據(jù)區(qū)域的點(diǎn)、直徑、三角等結(jié)構(gòu)元素?cái)?shù)值選定點(diǎn)云區(qū)域,結(jié)果如圖 6(j)~(l)所示。
責(zé)任編輯:lq6
-
圖像
+關(guān)注
關(guān)注
2文章
1094瀏覽量
41183 -
點(diǎn)云
+關(guān)注
關(guān)注
0文章
58瀏覽量
3950
原文標(biāo)題:采用空間投影的深度圖像點(diǎn)云分割
文章出處:【微信號:jiqishijue2020,微信公眾號:機(jī)器視覺自動化】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
自動駕駛中常提的“點(diǎn)云”是個啥?

DLP4500利用相機(jī)計(jì)算出的投影儀標(biāo)志點(diǎn)的世界坐標(biāo)需要做什么處理嗎?
請問DLP3010 Light Control EVM有沒有一種便捷的方式投影圖片?
電腦制作云存儲空間,如何使用電腦制作云存儲空間
一種降低VIO/VSLAM系統(tǒng)漂移的新方法

什么是三維點(diǎn)云分割
一種簡單高效配置FPGA的方法
語義分割25種損失函數(shù)綜述和展望

激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
一種無透鏡成像的新方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論