 機器人IMU:補足導航欠缺,輔助機器運動
機器人IMU:補足導航欠缺,輔助機器運動

從掃地機器人到物流機器人到工業搬運機器人,這些都可以算作移動機器人范疇。隨著移動機器人的普及,大家也對它們的出現已經習以為常了。我們常見的這些移動機器人都屬于輪式機器人,雖然它們有著各種各樣的底盤,但歸根結底它們的移動都需要靠底盤上的車輪來模擬人的移動。
兩輪差速底盤應該是現在應用最多的移動底盤,兩個驅動輪帶一個從動萬向輪,靠差速轉彎。掃地機器人以及絕大部分物流AMR都選擇了這種移動底盤。尤其是AMR,作為自主導航機器人,機器必須實時知曉自己的位置。在移動機器人測算自己位置的時候,離不開絕對角度這個值,這個值是由IMU提供的。可以說機器人整體里程計的精度,也就是機器人的”位置感”,和IMU有著莫大的關系。
融合IMU成了視覺SLAM方案和激光SLAM方案補足自身導航方案缺點的有效手段。IMU發展至今也將加速度傳感器、陀螺儀、磁傳感器等MEMS器件集成在一起,以更小的體積、更低的成本來輔助機器運動。本期將挑選機器人應用向性能頂尖的IMU看看它們做到了什么樣的層次。
ADIS16486完整慣性系統
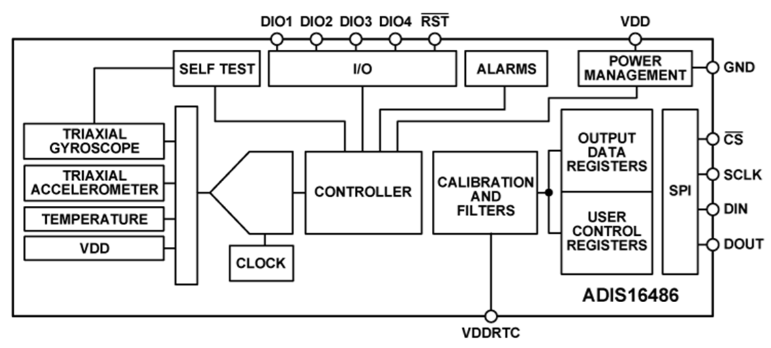
(ADI)
ADIS16486內置了一個三軸陀螺儀和一個三軸加速計,針對各傳感器的靈敏度、偏置、對準和線性加速度都進行了校準。可以說每個傳感器都配有動態補償公式,提供精確的傳感器測量。
內置的三軸陀螺儀最重要的靈敏度誤差,僅有±0.5%,這是最關鍵的指標。動態范圍為±450°/s,軸間錯位誤差為±0.018°,運行偏置的穩定性為5.3°/h,FS非線性度僅為0.01%。三軸陀螺儀的精度參數值都是很高的精度水平而且噪聲密度極低。同時三軸數字加速計的動態范圍也在±18g左右。在保證三軸的精度同時,還有著角度增量輸出和速度增量輸出。嚴格的正交對準可簡化導航系統中的慣性坐標系對準。
該慣性系統可以承受最大2000g的機械沖擊,串行外設接口和寄存器結構針對數據收集和配置控制提供簡單的接口。這種完整的系統設計比起復雜且昂貴的分立設計,可以說是既簡單又高效。這系列可以很好的適配各類移動機器人導航系統。
ICM-42688-P IMU單元
(TDK)
這款6軸MEMS運動傳感器,在性能上是絕對的行業領先。它的噪聲、靈敏度以及隨時間和溫度變化的偏置穩定性都處于很高的行業水平。其中的陀螺儀,最關鍵的靈敏度誤差,依然是±0.5%這個絕對領先的數值。在零速率偏移量上,可以做到±0.5dps這種車載水平。而在機器人應用中絕對重要的噪聲密度,為0.0028dps/√Hz,低密度的噪聲讓機器人更容易獲取自己的位置信息。
加速度計同樣是±0.5%的靈敏度誤差以及車載水平的±40mg零加速度偏移量。噪聲密度為75dps/√Hz。該IMU配合TDK旗下的RoboVac可以進一步提高應用程序性能的獨特功能,如與RTC同步的樣本,20位的ADC,32kHz的ODR。
這個系列還有一個更直接的優勢,功耗低。在低噪聲模式下的A+G為880μA;在低功率模式下的A小于50μA。對于移動機器人這類中小型機器人,低功耗器件往往是廠商的第一選擇。
ISM330DHCX iNEMO慣性模塊
之所以叫做iNEMO慣性模塊,是因為ST在IMU內整合了補充類型的傳感器,提供了比分立式MEMS產品更小巧、穩定且易于組裝的慣性模塊。整合的器件包括加速計,陀螺儀以及磁力計。

(ST)
ISM330DHCX的傳感元件采用專門的MEMS工藝制造,IC接口則采用CMOS技術開發,與傳感元件有很好的匹配度。在ISM330DHCX中不同于其他設計的是加速度計和陀螺儀的傳感元件在同一個硅芯片上,這種設計最直接的效果就是提升了器件的穩定性和魯棒性。
ISM330DHCX的滿標度加速度范圍為±2/±4/±8/±16 g,角速率范圍為±125/±250/±500/±1000/±2000/±4000 dps覆蓋范圍很廣,不僅適用于機器人應用,對于絕大部分工業應用都有覆蓋。雖然該模塊是泛工業應用器件,不是專門針對機器人應用推出的,但是它在整體設計有無可爭議的優異性能,以及完善的配套可以完美契合移動機器人應用。
首先為了在系統層面進一步節電,iNEMO 慣性模塊內嵌機器學習內核。MLC運行一個傳感器內置的分類引擎,卸載主處理器的負荷以運行不同的任務,同時內置的傳感器可以識別運動數據。另外多個傳感器輸出的集成令運動傳感系統的精度很高,在機器室內導航應用上能很好的彌補V-SLAM和激光SLAM的缺陷。
小結
在機器人應用上這些器件屬于高性能的選擇,有些指標甚至是車規級應用的水平。移動機器人在IMU上的選擇很大程度上決定了其導航水平的高低。沒有IMU給SLAM這種極度依賴外部數據的系統提供輔助數據,整個導航系統也是“睜眼瞎”。在移動機器人廠商大談自家SLAM導航如何優秀如何獨特的時候,切不可忘了這些給SLAM技術提供支持的元器件性能是否與之匹配。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
移動機器人
+關注
關注
2文章
789瀏覽量
34147 -
IMU
+關注
關注
6文章
363瀏覽量
46727
發布評論請先 登錄
相關推薦
熱點推薦
盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統、定位系統、導航系統、智能交互系統和運動系統協同工作,來實現為旅客準確指路和提供服務的功能,以下是其詳細工作原理:
感知系統
傳感器類型 :機器人配備
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和自主導航的核心技術有了更深入的理解。以下是我的心得體會
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
、Gazebo仿真(含RGBD相機/激光雷達仿真)、實物機器人運動控制,實現\"仿真→實物\"的無縫銜接
高階應用篇(7-9章)
聚焦視覺SLAM、自主導航等前沿場景,提供完整項目鏈路(如
發表于 04-27 11:24
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
講解使用ROS 2開發機器人視覺識別、地圖構建和自主導航等眾多應用的方法,讓機器人不僅動得了,還能看懂和理解周圍的環境,并且產生進一步的交互運動。
本書特色
本書采用 最新穩定版本R
發表于 03-03 14:18
慣性測量單元傳感器在自主移動機器人的應用
慣性測量單元(IMU)傳感器可實現機器人的定位與導航,已成為機器人精確定位的重要組成部分。IMU集成了加速度計、陀螺儀和磁力計,通過提供實時

伺服電動缸在人形機器人中的應用
將伺服電機自身優勢轉變成精確速度控制、精確位置控制和精確推力控制,從而實現高精度直線運動。這種特性使其成為人形機器人的核心運動部件,特別是在關節驅動方面。二、替代傳統驅動方式在人形機器人
發表于 02-06 09:04
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
IMU加持:無人機&機器人再啟新章!
無人機與機器人技術的快速發展,對核心組件的性能提出了更高要求。ER-MIMU-07,作為全球最小的六軸MEMS IMU,以其卓越的性能為無人機和機器人的穩定飛行和精準控制帶來全新體驗。
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
近年來,人工智能領域的大模型技術在多個方向上取得了突破性的進展,特別是在機器人控制領域展現出了巨大的潛力。在“具身智能機器人大模型”部分,作者研究并探討了大模型如何提升機器人的能力,大模型存在
發表于 12-29 23:04
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
關鍵路徑:利用GNSS和IMU等傳感器直接獲取位置信息,同時通過攝像頭、激光雷達獲取環境距離信息反向推算位置。在數據處理環節,采用卡爾曼濾波器和最大后驗估計方法融合多傳感器數據,優化機器人位置和運動狀態
發表于 12-19 22:26
柔性機器人與剛性機器人區別與聯系
、伸縮和變形。其結構通常模仿生物體的柔性和彈性特征。 剛性機器人:由剛性材料(如金屬、硬質塑料等)制成,具有固定形狀和結構,無法輕易變形。 2.運動方式 柔性機器人:通過柔性驅動(如氣動、液壓、形狀記憶合金等)實現復雜的






 工商網監
工商網監
評論