 四旋翼無人機是如何實現飛行的,它的原理是什么
四旋翼無人機是如何實現飛行的,它的原理是什么
四旋翼無人機曾被《時代》雜志評為2014年度十大科技產品之一,具有造型小巧,可自由懸停、垂直起降,機身易操控以及適用于多種環境等優點,被廣泛運用于日常生活中。
在人工智能教育高速發展的環境下,可編程的四旋翼無人機更是受到許多中小學生的追捧。下面,我們一起來了解一下四旋翼無人機是如何實現飛行的吧!
四旋翼無人機飛行原理及控制方法
一般情況下,四旋翼無人機由檢測模塊、控制模塊、驅動模塊以及電源模塊四個部分組成。
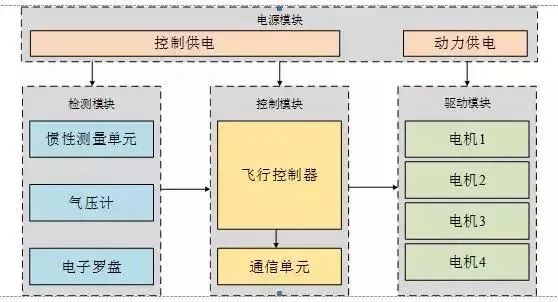
檢測模塊:負責對無人機當前姿態進行量測,并對控制模塊提供數據;
控制模塊:負責對無人機當前姿態進行解算,優化控制,并對驅動模塊產生相對應的控制量;
驅動模塊:負責驅動無人機進行飛行;
電源模塊:負責對整個系統進行供電。
四旋翼無人機機身主要是由對稱的十字形剛體結構構成,材料多采用碳纖維、玻璃纖維以及樹脂等復合材料。而Drone:bit編程無人機機身則是采用了金屬材料,具有結實耐用的特點。
 Drone:bit
Drone:bit如下圖所示,現將位于四旋翼機身同一對角線上的兩個旋翼歸為一組。
前后端(4、2號)的旋翼沿順時針方向旋轉,從而可以產生順時針方向的扭矩;而左右端(1、3號)的旋翼則沿逆時針方向旋轉,從而產生逆時針方向的扭矩。
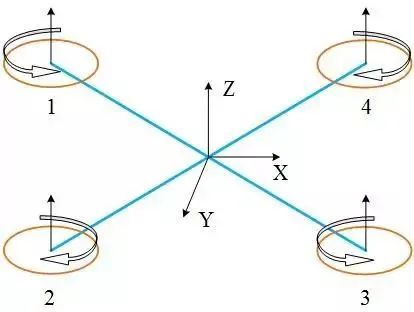
如此,四個旋翼旋轉所產生的扭矩便可相互抵消。
由此可知,四旋翼無人機的所有姿態和位置的控制都是通過調節四個驅動電機的速度實現的。
一般來說,四旋翼無人機的運動狀態主要分為懸停、垂直運動、翻滾運動、俯仰運動以及偏航運動五種狀態。
懸停
在懸停狀態下,由于無人機的四個旋翼具有相同的轉速,產生的上升合力正好與自身重力相等;并且因為旋翼轉速大小相同、前后端和左右端轉速方向相反,從而使得無人機總扭矩為零,得以靜止在空中,實現懸停狀態。
- 旋翼總升力=無人機重力,懸停
垂直運動
在保證四旋翼無人機每個旋翼轉速大小相同、前后端和左右端轉速方向相反的情況下,同時對每個旋翼增加/減小大小相同的轉速,便可實現無人機的垂直運動。
- 旋翼總升力>無人機重力,垂直上升;
- 旋翼總升力<無人機重力,垂直下降。
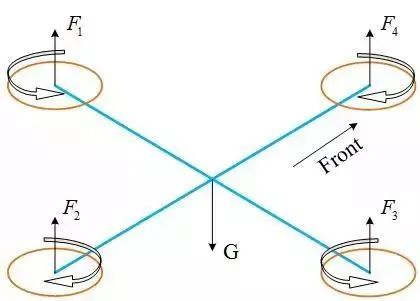
翻滾運動
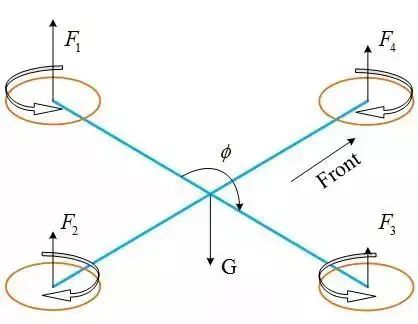
翻滾運動是在保持四旋翼無人機前后端旋翼轉速不變的情況下,通過改變左右端的旋翼轉速,使得左右旋翼之間形成一定的升力差,從而使得沿無人機機體左右對稱軸上產生一定力矩,導致在方向上產生角加速度實現控制。
如圖所示,增加旋翼1的轉速,減小旋翼3的轉速,則無人機傾斜于右側飛行;反之,則向左傾斜。
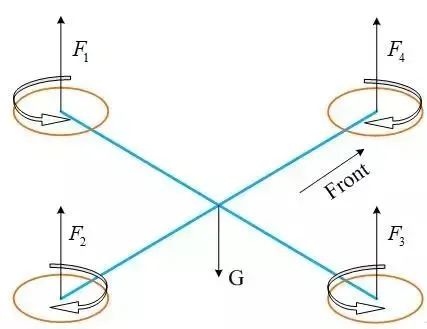
俯仰運動
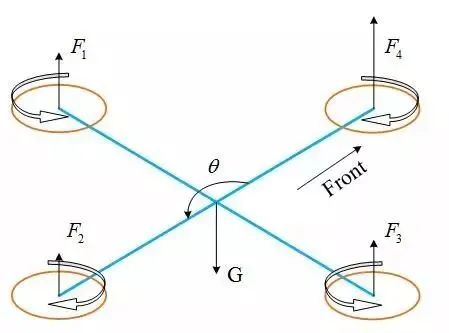
與翻滾運動相似,在保持四旋翼無人機左右端旋翼轉速不變的情況下,通過改變前后端的旋翼轉速,形成前后旋翼升力差,從而在機體前后對稱軸上形成一定力矩,引起角方向上的角加速度實現控制。
如圖所示,增加旋翼2的轉速,減小旋翼4的轉速,則無人機向前傾斜飛行;反之,則向后傾斜。
偏航運動
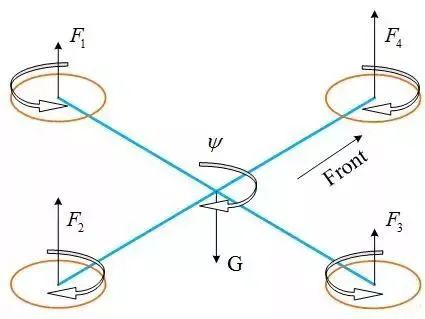
四旋翼無人機的偏航運動是通過同時兩兩控制四個旋翼轉速實現控制的。
保持前后端或左右端旋翼轉速相同時,其便不會發生俯仰或翻滾運動;而當每組內的兩個旋翼與另一組旋翼轉速不同時,由于兩組旋翼旋轉方向不同,就會導致反扭矩力的不平衡,此時便會產生繞機身中心軸的反作用力,引起沿角角加速度。
如圖所示,當前后端旋翼的轉速相同并大于左右端旋翼轉速時,因為前者沿順時針方向旋轉,后者相反,總的反扭矩沿逆時針方向,反作用力作用在機身中心軸上沿逆時針方向,引起逆時針偏航運動;反之,則會引起順時針偏航運動。
綜上所述,四旋翼無人機各個飛行狀態的控制是通過控制對稱的四個旋翼的轉速,形成相應不同的運動組合實現的。
更多無人機STEAM教育資訊,可關注公眾號“創客火無人機”。
編輯:fqj
-
飛行器
+關注
關注
13文章
737瀏覽量
46206 -
無人機
+關注
關注
230文章
10757瀏覽量
185706
發布評論請先 登錄
使用 Betaflight 和樹莓派實現 FPV 無人機自主飛行!

《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
MOS 管在無人機電池中的關鍵應用

無人機飛行控制器的組成部件和工作原理

從姿態到飛行控制,IMU全方位守護無人機飛行

DIY了一臺無人機,用全志T113芯片
為何無人機領域廣泛采用PX4作為核心控制平臺

開源項目!DIY了一臺無人機,用全志T113芯片
無人機飛行仿真模擬訓練系統
無人機機載高光譜成像系統的應用及優勢





 工商網監
工商網監
評論