 半導體單晶片旋轉清洗器中渦流的周期性結構
半導體單晶片旋轉清洗器中渦流的周期性結構
引言
近年來,隨著集成電路的微細化,半導體制造的清洗方式從被稱為“批量式”的25枚晶片一次清洗的方式逐漸改變為“單張式”的晶片一次清洗的方式。在半導體的制造中,各工序之間進行晶片的清洗,清洗工序次數多,其時間縮短、高精度化決定半導體的生產性和質量。在單張式清洗中,用超純水沖洗晶片 ,一邊高速旋轉,一邊從裝置上部使干燥的空氣流過。在該方式中,逐個處理晶片。上一行程粒子的交錯污染少。近年來,由于高壓噴氣和極低溫的關于向粒子噴射氮氣溶膠等“清洗能力相關技術”進行了大量研究;另一方面,關于通過清洗暫時遠離晶片的粒子,重新附著到晶片上,進行葉片式清洗,在干燥時晶片和保持晶片的轉盤高速旋轉。
實驗
單張式清洗裝置模型:
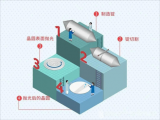
圖1a表示裝置整體的系統圖,圖1b表示測定部的詳細情況。測定部由模擬清洗機處理室的直徑D=520mm、高470mm的圓筒構成,其中放置有半徑R=165mm的圓板。另外,本研究還包括吹向圓板的氣流通過送風機在裝置內循環。送風機送來的氣流通過節流流量計,通過設置在處理室上方的流路,流入長1830mm的助跑區間。助跑區間入口設有格子間隔26mm的整流用蜂窩,在本研究中,硅片和保持硅片的卡盤工作臺簡化為一個,將厚度10mm的鋁制圓板用作旋轉圓板,在該圓板下部設置有排氣罩,在其內側設置有3個排氣口另外,處理室的間隙分別為28mm、45mm。流入測量部的氣流與旋轉圓板碰撞,通過排氣罩和處理室的間隙(以下將其稱為排氣狹縫)進入排氣罩內,從排氣口返回送風機。
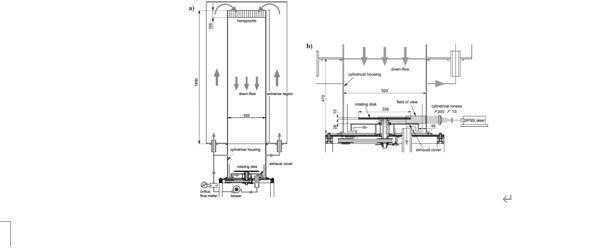
圖1 1a示出了實驗裝置的示意圖實驗裝置的示意圖,箭頭表示流動回路及其方向。圖1b顯示了轉盤附近的細節。該圖還顯示了粒子圖像測速的光學系統和測量區域
2PIV測量:
測量中使用了PIV。PIV用示蹤劑使用了用加熱器加熱丙二醇水溶液并霧化后的煙霧。在本文中,以調查從圓板產生的渦流到處理室內壁的平流為目的,用圖1b虛線表示。
LES計算:
雖然本PIV測量是非穩態測量,但是只能掌握從圓板附近到管壁的二維流動的舉動。 實際的趨勢是,由于伴隨圓盤旋轉的8個方向的流動,因此呈三維結構,本PIV是該三維結構的一部分 不過是按時間順序追趕著部。因此,在PIV測量的基礎上進行了三維數值計算,通過實驗和計算的互補,嘗試了更準確地推測現實中在清洗機內形成的流動的三維結構。
結果和討論
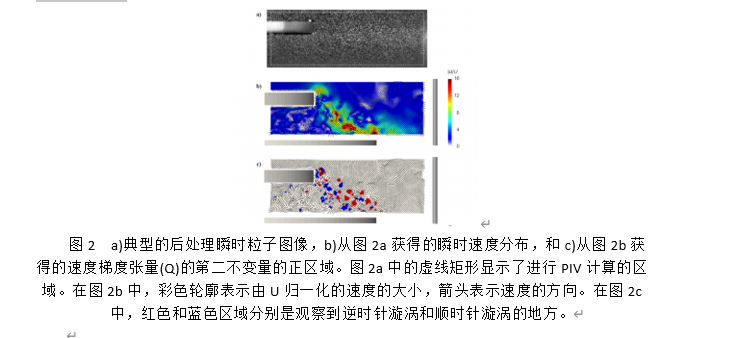
基于1Q2值的渦流區域辨識中,著眼于在可能引起垃圾再次附著的清洗機內形成的渦流結構。因此,根據PIV測量LES計算的兩個數據計算速度梯度張量的第2不變量,計算出以下定義的Q2值,確定了轉彎勝過剪切的區域。
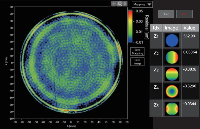
圖2c表示其結果,圖為根據圖2b的瞬時速度場計算出的Q2值分布,Q2 > 5000的順時針旋轉區域用藍色表示,逆時針旋轉區域用紅色表示。根據圖可知,從流速快的圓板端到排氣狹縫的帶狀區域中存在多個漩渦。 渦流層外緣側紅色表示的逆時針渦流很多,內緣側藍色表示的順時針渦流很多。另外,在圓板和排氣罩之間的區域,速度矢量看起來不規則排列,但值本身很小。根據該圖,在圓板端生成預計形成的微小漩渦主要沿著平均流移動,被吸入排氣狹縫。
渦區域的三維結構:
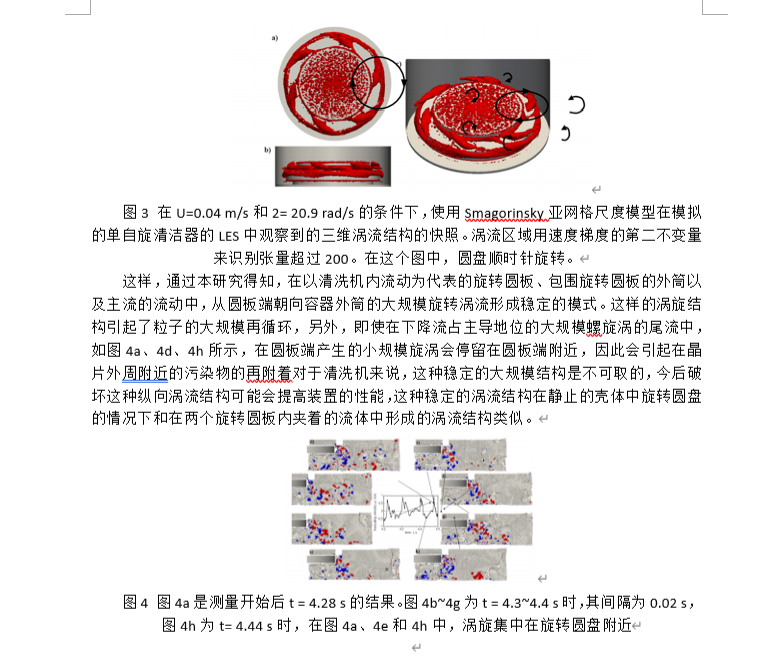
圖3表示的是用LES得到的結果。圖中表示的是U=0.04m/s, q = 20.9 rad/s (相當于q = 0.5m/min, n=200rpm )時0= 200的等值面。根據圖,在該條件下旋轉,可以看出向筒壁延伸。這個渦流管從圓盤的旋轉方向看是順時針旋轉的。而且這個渦流管穩定地存在于流場中,以比圓板的旋轉角速度慢得多的角速度在與圓板相同的方向上旋轉。
總結
在本研究中,我們進行了單張式硅片清洗裝置內的二維瞬態PIV測量和三維LES,并在清洗機內形成進行了三維渦流結構的推定。另外,PIV測量、LES在渦結構的鑒定中都是速度梯度張量使用的第2不變量Q2值,根據PIV測量的結果可知,通過圓板的旋轉從其端面形成多個渦流,存在從圓板端朝向排氣罩的帶狀渦流區域,該渦流區域中,來自裝置上方的下降流占優勢被壓入圓板和排氣罩之間的情況、以及圓板和排氣罩之間的流動的放射流分為兩部分,它們周期性的重復。這種現象的頻率與圓板的轉速成比例地增加,這個趨勢與實驗中觀測到的、渦的存在區域與圓板的轉速成比例周期性變化的其頻率的增加趨勢一致,可以得出結論,在實驗中也存在著通過LES得到的大規模結構。
審核編輯:湯梓紅
-
半導體
+關注
關注
335文章
28702瀏覽量
234221 -
結構
+關注
關注
1文章
117瀏覽量
21918 -
晶片
+關注
關注
1文章
407瀏覽量
31963
發布評論請先 登錄
蘇州芯矽科技:半導體清洗機的堅實力量
VirtualLab:用于微結構晶片檢測的光學系統
半導體單片清洗機結構組成介紹
半導體VTC清洗機是如何工作的
什么是單晶圓清洗機?
半導體濕法清洗有機溶劑有哪些
半導體制造中的濕法清洗工藝解析
鎵仁半導體成功實現VB法4英寸氧化鎵單晶導電摻雜
碳化硅外延晶片硅面貼膜后的清洗方法
碳化硅晶片表面金屬殘留的清洗方法
半導體行業工藝知識
運用MSPM0的DMA和Event功能實現ADC多路周期性采樣






 工商網監
工商網監
評論