 STM32:SPI總線、W25Q64(FLASH)的詳細介紹
STM32:SPI總線、W25Q64(FLASH)的詳細介紹
一、環境介紹
操作系統: win10
STM32編程方式: 寄存器開發 (方便程序移植到其他單片機)
SPI總線:STM32本身支持SPI硬件時序,本文示例代碼里同時采用模擬時序和硬件時序兩種方式讀寫W25Q64。
模擬時序更加方便移植到其他單片機,更加方便學習理解SPI時序,通用性更高,不分MCU;
硬件時序效率更高,每個MCU配置方法不同,依賴MCU硬件本身支持。
存儲器件: 采用華邦W25Q64 flash存儲芯片。
W25Q64這類似的Flash存儲芯片在單片機里、嵌入式系統里還是比較常見,可以用來存儲圖片數據、字庫數據、音頻數據、保存設備運行日志文件等。
二、華邦W25Q64介紹(FLASH存儲類型)
2.1 W25Q64芯片功能介紹
?

W25Q64是為系統提供一個最小空間、最少引腳,最低功耗的串行Flash存儲器,25Q系列比普通的串行Flash存儲器更靈活,性能更優越。
W25Q64支持雙倍/四倍的SPI,可以儲存包括聲音、文本、圖片和其他數據;芯片支持的工作電壓 2.7V 到 3.6V,正常工作時電流小于5mA,掉電時低于1uA,所有芯片提供標準的封裝。
W25Q64的內存空間結構: 一頁256字節,4K(4096 字節)為一個扇區,16個扇區為1塊,容量為8M字節,共有128個塊,2048 個扇區。
W25Q64每頁大小由256字節組成,每頁的256字節用一次頁編程指令即可完成。
擦除指令分別支持: 16頁(1個扇區)、128頁、256頁、全片擦除。
W25Q64支持標準串行外圍接口(SPI),和高速的雙倍/四倍輸出,雙倍/四倍用的引腳:串行時鐘、片選端、串行數據 I/O0(DI)、I/O1(DO)、I/O2(WP)和 I/O3(HOLD)。
SPI 最高支持 80MHz,當用快讀雙倍/四倍指令時,相當于雙倍輸出時最高速率160MHz,四倍輸出時最高速率 320MHz。這個傳輸速率比得上8位和16位的并行Flash存儲器。
W25Q64支持 JEDEC 標準,具有唯一的 64 位識別序列號,方便區別芯片型號。
2.2 W25Q64芯片特性詳細介紹
●SPI串行存儲器系列
-W25Q64:64M 位/8M 字節
-W25Q16:16M 位/2M 字節
-W25Q32:32M 位/4M 字節
-每 256 字節可編程頁
●靈活的4KB扇區結構
-統一的扇區擦除(4K 字節)
-塊擦除(32K 和 64K 字節)
-一次編程 256 字節
-至少 100,000 寫/擦除周期
-數據保存 20 年
●標準、雙倍和四倍SPI
-標準 SPI:CLK、CS、DI、DO、WP、HOLD
-雙倍 SPI:CLK、CS、IO0、IO1、WP、HOLD
-四倍 SPI:CLK、CS、IO0、IO1、IO2、IO3
●高級的安全特點
-軟件和硬件寫保護
-選擇扇區和塊保護
-一次性編程保護(1)
-每個設備具有唯一的64位ID(1)
●高性能串行Flash存儲器
-比普通串行Flash性能高6倍
-80MHz時鐘頻率
-雙倍SPI相當于160MHz
-四倍SPI相當于320MHz
-40MB/S連續傳輸數據
-30MB/S隨機存取(每32字節)
-比得上16位并行存儲器
●低功耗、寬溫度范圍
-單電源 2.7V-3.6V
-工作電流 4mA,掉電<1μA(典型值)
-40℃~+85℃工作
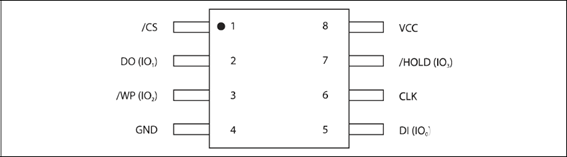
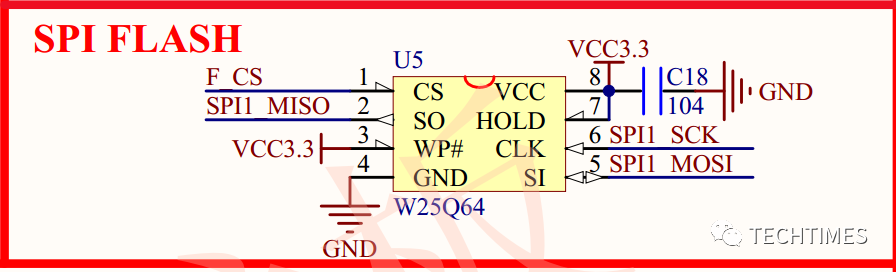
2.3 引腳介紹
下面只介紹W25Q64標準SPI接口,因為目前開發板上的封裝使用的就是標準SPI接口。
?
|
引腳編號 |
引腳名稱 |
I/O |
功能 |
|
1 |
/CS |
I |
片選端輸入 |
|
2 |
DO(IO1) |
I/O |
數據輸出(數據輸入輸出 1)*1 |
|
3 |
/WP(IO2) |
I/O |
寫保護輸入(數據輸入輸出 2)*2 |
|
4 |
GND |
|
地 |
|
5 |
DI(IO0) |
I/O |
數據輸入(數據輸入輸出 0)*1 |
|
6 |
CLK |
I |
串行時鐘輸入 |
|
7 |
/HOLD(IO3) |
I/O |
保持端輸入(數據輸入輸出 3)*2 |
|
8 |
VCC |
|
2.2.1 SPI片選(/CS)引腳用于使能和禁止芯片操作
CS引腳是W25Q64的片選引腳,用于選中芯片;當CS為高電平時,芯片未被選擇,串行數據輸出(DO、IO0、IO1、IO2 和 IO3)引腳為高阻態。未被選擇時,芯片處于待機狀態下的低功耗,除非芯片內部在擦除、編程。當/CS 變成低電平,芯片功耗將增長到正常工作,能夠從芯片讀寫數據。上電后, 在接收新的指令前,/CS 必須由高變為低電平。上電后,/CS 必須上升到 VCC,在/CS 接上拉電阻可以完成這個操作。
2.2.2 串行數據輸入、輸出和 IOs(DI、DO 和 IO0、IO1、IO2、IO3)
W25Q64、W25Q16 和 W25Q32 支持標準 SPI、雙倍 SPI 和四倍 SPI。
標準的 SPI 傳輸用單向的 DI(輸入)引腳連續的寫命令、地址或者數據在串行時鐘(CLK)的上升沿時寫入到芯片內。
標準的SPI 用單向的 DO(輸出)在 CLK 的下降沿從芯片內讀出數據或狀態。
2.2.3 寫保護(/WP)
寫保護引腳(/WP)用來保護狀態寄存器。和狀態寄存器的塊保護位(SEC、TB、BP2、BP1 和BP0)和狀態寄存器保護位(SRP)對存儲器進行一部分或者全部的硬件保護。/WP 引腳低電平有效。當狀態寄存器 2 的 QE 位被置位了,/WP 引腳(硬件寫保護)的功能不可用。
2.2.4 保持端(/HOLD)
當/HOLD 引腳是有效時,允許芯片暫停工作。在/CS 為低電平時,當/HOLD 變為低電平,DO 引腳將變為高阻態,在 DI 和 CLK 引腳上的信號將無效。當/HOLD 變為高電平,芯片恢復工作。/HOLD 功能用在當有多個設備共享同一 SPI 總線時。/HOLD 引腳低電平有效。當狀態寄存器 2 的 QE 位被置位了,/ HOLD 引腳的功能不可用。
2.2.5 串行時鐘(CLK)
串行時鐘輸入引腳為串行輸入和輸出操作提供時序。(見 SPI 操作)。
設備數據傳輸是從高位開始,數據傳輸的格式為 8bit,數據采樣從第二個時間邊沿開始,空閑狀態時,時鐘線 clk 為高電平。
2.3 內部結構框架圖
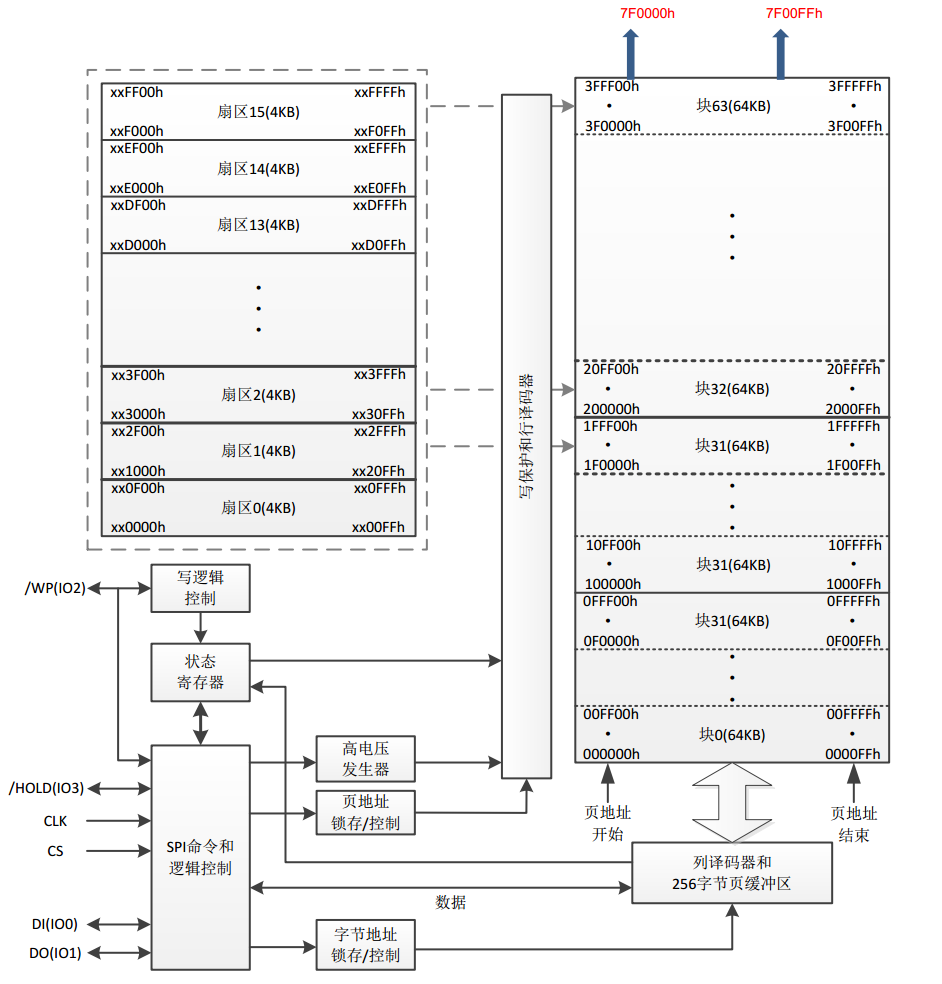
?
2.4 W25Q64的標準SPI操作流程
W25Q64標準SPI總線接口包含四個信號: 串行時鐘(CLK)、片選端(/CS)、串行數據輸入(DI)和串行數據輸出(DO)。
DI輸入引腳在CLK的上升沿連續寫命令、地址或數據到芯片內。
DO輸出引腳在CLK的下降沿從芯片內讀出數據或狀態。
W25Q64分別支持SPI總線工作模式0和工作模式3。模式0和模式3的主要區別在于常態時的CLK信號不同;對于模式0來說,當SPI主機已準備好數據還沒傳輸到串行Flash中時,CLK信號常態為低;
設備數據傳輸是從高位開始,數據傳輸的格式為8bit,數據采樣從第二個時間邊沿開始,空閑狀態時,時鐘線clk為高電平。
2.5 部分控制和狀態寄存器介紹
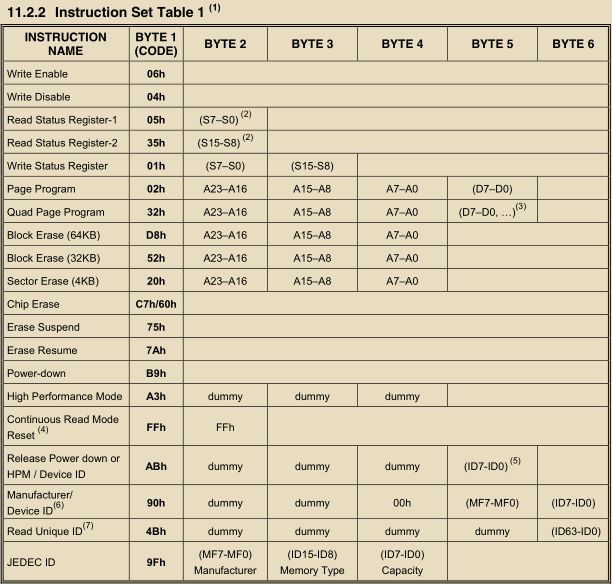
2.5.1 W25Q64的指令表
|
指令名稱 |
字節 1 (代碼) |
字節 2 |
字節 3 |
字節 4 |
字節 5 |
字節 6 |
|
寫使能 |
06h |
write_enabled |
||||
|
禁止寫 |
04h |
|
||||
|
讀狀態寄存器 1 |
05h |
(S7-S0)(2) |
|
|||
|
讀狀態寄存器 2 |
35h |
(S15-S8)(2) |
|
|||
|
寫狀態寄存器 |
01h |
(S7-S0) |
(S15-S8) |
|
||
|
頁編程 |
02h |
A23-A16 |
A15-A8 |
A7-A0 |
(D7-D0) |
|
|
四倍頁編程 |
32h |
A23-A16 |
A15-A8 |
A7-A0 |
(D7-D0,…)(3) |
|
|
塊擦除(64KB) |
D8h |
A23-A16 |
A15-A8 |
A7-A0 |
|
|
|
塊擦除(32KB) |
52h |
A23-A16 |
A15-A8 |
A7-A0 |
|
|
|
扇區擦除(4KB) |
20h |
A23-A16 |
A15-A8 |
A7-A0 |
|
|
|
全片擦除 |
C7h/60h |
|
||||
|
暫停擦除 |
75h |
|
||||
|
恢復擦除 |
7Ah |
|
||||
|
掉電模式 |
B9h |
|
||||
|
高性能模式 |
A3h |
|
|
|
|
|
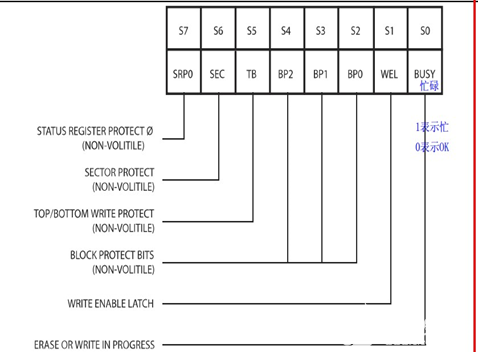
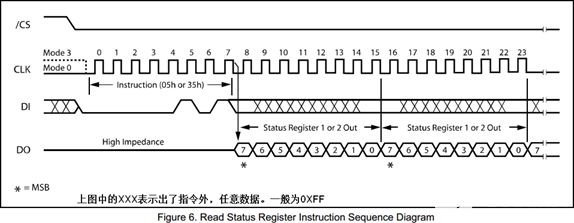
2.5.2 讀狀態寄存器1
狀態寄存器1的內部結構如下:
?
狀態寄存器1的S0位是當前W25Q64的忙狀態;為1的時候表示設備正在執行程序(可能是在擦除芯片)或寫狀態寄存器指令,這個時候設備將忽略傳來的指令, 除了讀狀態寄存器和擦除暫停指令外,其他寫指令或寫狀態指令都無效, 當 S0 為 0 狀態時指示設備已經執行完畢,可以進行下一步操作。
讀狀態寄存器1的時序如下:
?
讀取狀態寄存器的指令是 8 位的指令。發送指令之前,先將/CS 拉低,再發送指令碼“05 h” 或者“35h”。設備收到讀取狀態寄存器的指令后,將狀態信息(高位)依次移位發送出去,讀出的狀態信息,最低位為 1 代表忙,最低位為 0 代表可以操作,狀態信息讀取完畢,將片選線拉高。
讀狀態寄存器指令可以使用在任何時候,即使程序在擦除的過程中或者寫狀態寄存器周期正在進行中。這可以檢測忙碌狀態來確定周期是否完成,以確定設備是否可以接受另一個指令。
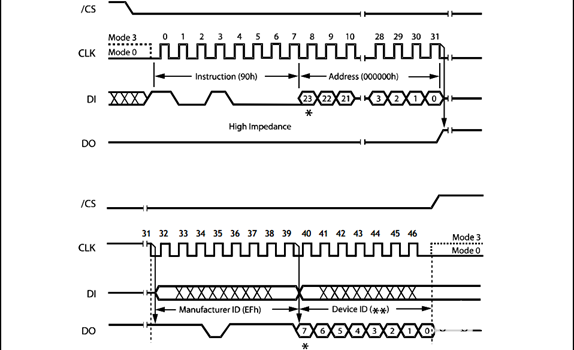
2.5.3 讀制造商ID和芯片ID
時序圖如下:
?
讀取制造商/設備 ID 指令可以讀取制造商 ID 和特定的設備 ID。讀取之前,拉低 CS 片選信號,接著發送指令代碼“90h” ,緊隨其后的是一個 24 位地址(A23-A0)000000h。 設備收到指令之后,會發出華邦電子制造商 ID(EFh) 和設備ID(w25q64 為 16h)。如果 24 位地址設置為 000001h ,設備 ID 會先發出,然后跟著制造商 ID。制造商和設備ID可以連續讀取。完成指令后,片選信號/ CS 拉高。
2.5.4 全片擦除(C7h/60h)
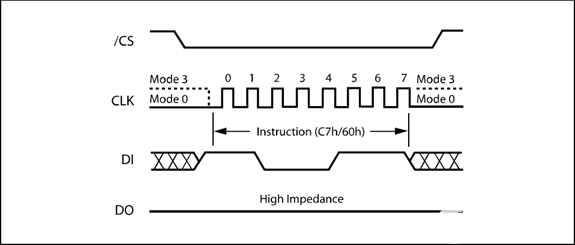
?
全芯片擦除指令,可以將整個芯片的所有內存數據擦除,恢復到 0XFF 狀態。寫入全芯片擦除指令之前必須執行設備寫使能(發送設備寫使能指令 0x06),并判斷狀態寄存器(狀態寄存器位最低位必須等于 0 才能操作)。發送全芯片擦除指令前,先拉低/ CS,接著發送擦除指令碼”C7h”或者是”60h”, 指令碼發送完畢后,拉高片選線 CS/,,并判斷狀態位,等待擦除結束。全片擦除指令盡量少用,擦除會縮短設備的壽命。
2.5.5 讀數據(03h)
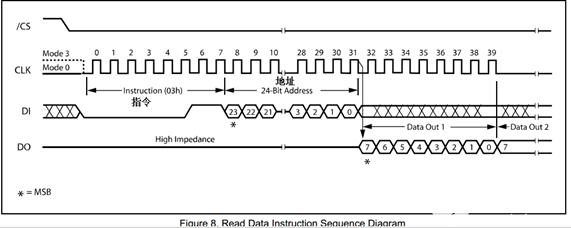
?
讀取數據指令允許按順序讀取一個字節的內存數據。當片選 CS/拉低之后,緊隨其后是一個 24 位的地址(A23-A0)(需要發送 3 次,每次 8 個字節,先發高位)。芯片收到地址后,將要讀的數據按字節大小轉移出去,數據是先轉移高位,對于單片機,時鐘下降沿發送數據,上升沿接收數據。讀數據時,地址會自動增加,允許連續的讀取數據。這意味著讀取整個內存的數據,只要用一個指令就可以讀完。數據讀取完成之后,片選信號/ CS 拉高。
讀取數據的指令序列,如上圖所示。如果一個讀數據指令而發出的時候,設備正在擦除扇區,或者(忙= 1),該讀指令將被忽略,也不會對當前周期有什么影響。
三、SPI時序介紹
SPI是串行外設接口(Serial Peripheral Interface)的縮寫,是一種高速的,全雙工,同步的通信總線,并且在芯片的管腳上只占用四根線,節約了芯片的管腳,同時為PCB的布局上節省空間。
SPI是一種高速、高效率的串行接口技術,一共有4根線。通常由一個主模塊和一個或多個從模塊組成,主模塊選擇一個從模塊進行同步通信,從而完成數據的交換。SPI是一個環形結構,通信時需要至少4根線(在單向傳輸時3根線也可以)。分別是MISO(主設備數據輸入)、MOSI(主設備數據輸出)、SCLK(時鐘)、CS(片選)。
(1)MISO– Master Input Slave Output,主設備數據輸入,從設備數據輸出;
(2)MOSI– Master Output Slave Input,主設備數據輸出,從設備數據輸入;
(3)SCLK – Serial Clock,時鐘信號,由主設備產生;
(4)CS – Chip Select,從設備使能信號,由主設備控制。
其中,CS是從芯片是否被主芯片選中的控制信號,也就是說只有片選信號為預先規定的使能信號時(高電位或低電位),主芯片對此從芯片的操作才有效。這就使在同一條總線上連接多個SPI設備成為可能。接下來就負責通訊的3根線了。通訊是通過數據交換完成的,這里先要知道SPI是串行通訊協議,也就是說數據是一位一位的傳輸的。這就是SCLK時鐘線存在的原因,由SCLK提供時鐘脈沖,SDI,SDO則基于此脈沖完成數據傳輸。數據輸出通過 SDO線,數據在時鐘上升沿或下降沿時改變,在緊接著的下降沿或上升沿被讀取。完成一位數據傳輸,輸入也使用同樣原理。因此,至少需要8次時鐘信號的改變(上沿和下沿為一次),才能完成8位數據的傳輸。
時鐘信號線SCLK只能由主設備控制,從設備不能控制。這樣的傳輸方式有一個優點,在數據位的傳輸過程中可以暫停,也就是時鐘的周期可以為不等寬,因為時鐘線由主設備控制,當沒有時鐘跳變時,從設備不采集或傳送數據。SPI還是一個數據交換協議:因為SPI的數據輸入和輸出線獨立,所以允許同時完成數據的輸入和輸出。芯片集成的SPI串行同步時鐘極性和相位可以通過寄存器配置,IO模擬的SPI串行同步時鐘需要根據從設備支持的時鐘極性和相位來通訊。SPI通信原理比I2C要簡單,IIC有應答機制,可以確保數據都全部發送成。SPI接口沒有指定的流控制,沒有應答機制確認是否接收到數據,速度上更加快。
SPI總線通過時鐘極性和相位可以配置成4種時序:
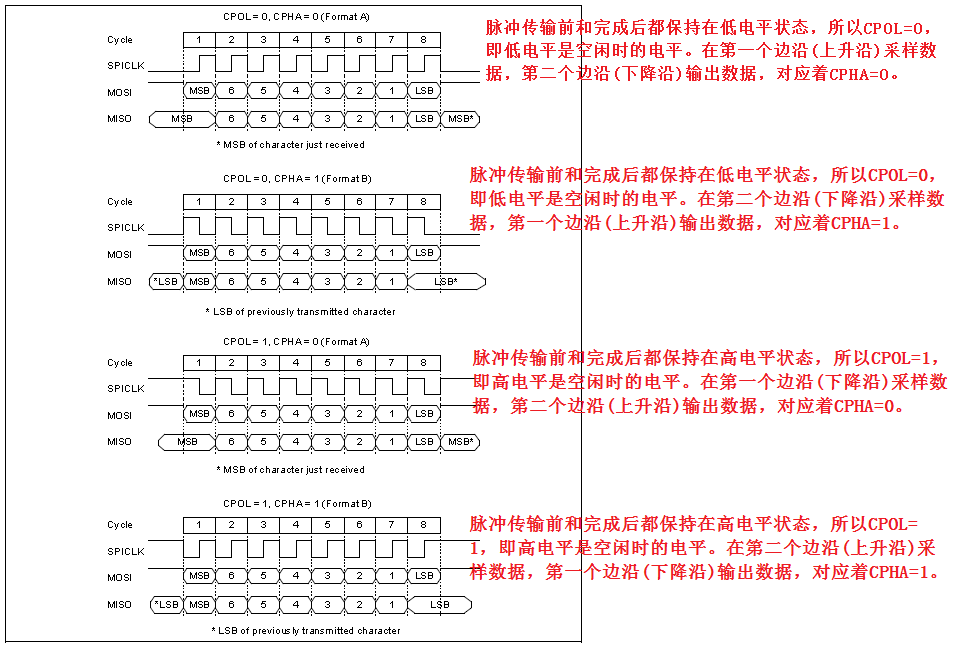
?
STM32F103參考手冊,SPI章節介紹的時序圖:
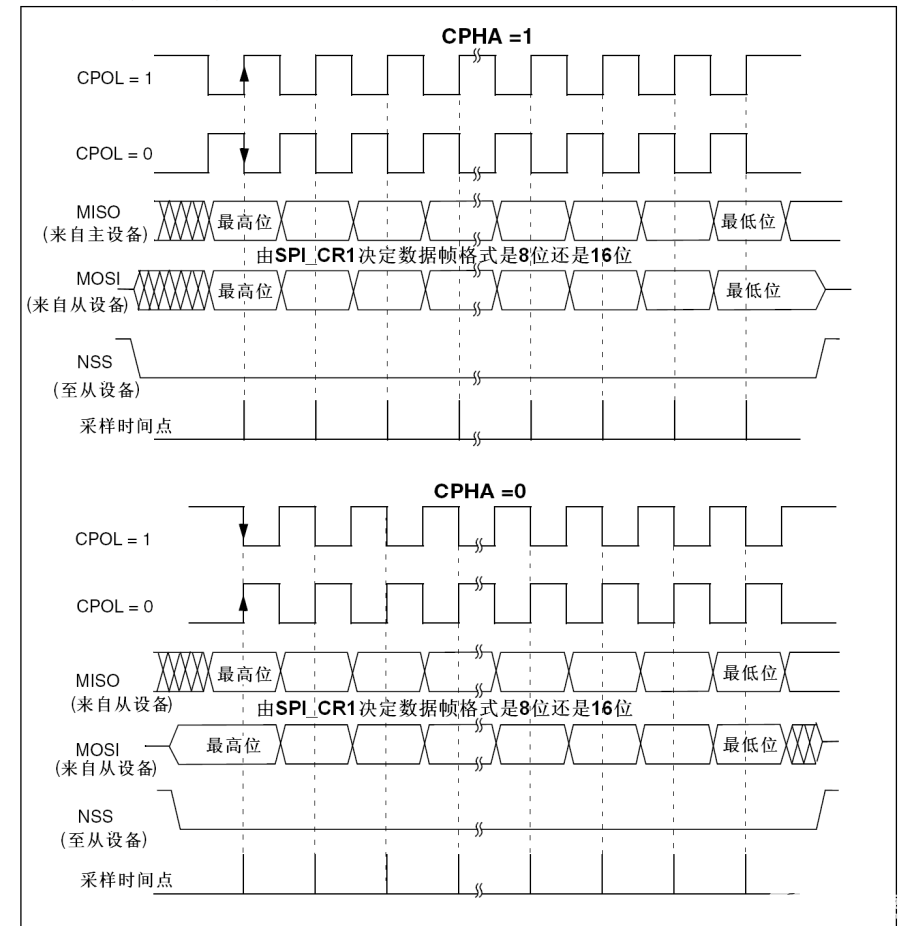
?
SPI時序比較簡單,CPU如果沒有硬件支持,可以直接寫代碼采用IO口模擬,下面是模擬時序的示例的代碼:
完整工程代碼下載:https://download.csdn.net/download/xiaolong1126626497/19425042
SPI的模式1:
u8 SPI_ReadWriteOneByte(u8 tx_data)
{
u8 i,rx_data=0;
SCK=0; //空閑電平(默認初始化情況)
for(i=0;i<8;i++)
{
/*1. 主機發送一位數據*/
SCK=0;//告訴從機,主機將要發送數據
if(tx_data&0x80)MOSI=1; //發送數據
else MOSI=0;
SCK=1; //告訴從機,主機數據發送完畢
tx_data<<=1; //繼續發送下一位
/*2. 主機接收一位數據*/
rx_data<<=1; //默認認為接收到0
if(MISO)rx_data|=0x01;
}
SCK=0; //恢復空閑電平
return rx_data;
}
SPI的模式2:
u8 SPI_ReadWriteOneByte(u8 tx_data)
{
u8 i,rx_data=0;
SCK=0; //空閑電平(默認初始化情況)
for(i=0;i<8;i++)
{
/*1. 主機發送一位數據*/
SCK=1;//告訴從機,主機將要發送數據
if(tx_data&0x80)MOSI=1; //發送數據
else MOSI=0;
SCK=0; //告訴從機,主機數據發送完畢
tx_data<<=1; //繼續發送下一位
/*2. 主機接收一位數據*/
rx_data<<=1; //默認認為接收到0
if(MISO)rx_data|=0x01;
}
SCK=0; //恢復空閑電平
return rx_data;
}
SPI的模式3:
u8 SPI_ReadWriteOneByte(u8 tx_data)
{
u8 i,rx_data=0;
SCK=1; //空閑電平(默認初始化情況)
for(i=0;i<8;i++)
{
/*1. 主機發送一位數據*/
SCK=1;//告訴從機,主機將要發送數據
if(tx_data&0x80)MOSI=1; //發送數據
else MOSI=0;
SCK=0; //告訴從機,主機數據發送完畢
tx_data<<=1; //繼續發送下一位
/*2. 主機接收一位數據*/
rx_data<<=1; //默認認為接收到0
if(MISO)rx_data|=0x01;
}
SCK=1; //恢復空閑電平
return rx_data;
}
SPI的模式4:
u8 SPI_ReadWriteOneByte(u8 tx_data)
{
u8 i,rx_data=0;
SCK=1; //空閑電平(默認初始化情況)
for(i=0;i<8;i++)
{
/*1. 主機發送一位數據*/
SCK=0;//告訴從機,主機將要發送數據
if(tx_data&0x80)MOSI=1; //發送數據
else MOSI=0;
SCK=1; //告訴從機,主機數據發送完畢
tx_data<<=1; //繼續發送下一位
/*2. 主機接收一位數據*/
rx_data<<=1; //默認認為接收到0
if(MISO)rx_data|=0x01;
}
SCK=1; //恢復空閑電平
return rx_data;
}
四、W25Q64的示例代碼
4.1 STM32采用硬件SPI讀寫W25Q64示例代碼
/*
函數功能:SPI初始化(模擬SPI)
硬件連接:
MISO--->PB14
MOSI--->PB15
SCLK--->PB13
*/
void SPI_Init(void)
{
/*開啟時鐘*/
RCC->APB1ENR|=1<<14; //開啟SPI2時鐘
RCC->APB2ENR|=1<<3; //PB
GPIOB->CRH&=0X000FFFFF; //清除寄存器
GPIOB->CRH|=0XB8B00000;
GPIOB->ODR|=0X7<<13; //PB13/14/15上拉--輸出高電平
/*SPI2基本配置*/
SPI2->CR1=0X0; //清空寄存器
SPI2->CR1|=0<<15; //選擇“雙線雙向”模式
SPI2->CR1|=0<<11; //使用8位數據幀格式進行發送/接收;
SPI2->CR1|=0<<10; //全雙工(發送和接收);
SPI2->CR1|=1<<9; //啟用軟件從設備管理
SPI2->CR1|=1<<8; //NSS
SPI2->CR1|=0<<7; //幀格式,先發送高位
SPI2->CR1|=0x0<<3;//當總線頻率為36MHZ時,SPI速度為18MHZ,高速。
SPI2->CR1|=1<<2; //配置為主設備
SPI2->CR1|=1<<1; //空閑狀態時, SCK保持高電平。
SPI2->CR1|=1<<0; //數據采樣從第二個時鐘邊沿開始。
SPI2->CR1|=1<<6; //開啟SPI設備。
}
/*
函數功能:SPI讀寫一個字節
*/
u8 SPI_ReadWriteOneByte(u8 data_tx)
{
u16 cnt=0;
while((SPI2->SR&1<<1)==0) //等待發送區空--等待發送緩沖為空
{
cnt++;
if(cnt>=65530)return 0; //超時退出 u16=2個字節
}
SPI2->DR=data_tx; //發送一個byte
cnt=0;
while((SPI2->SR&1<<0)==0) //等待接收完一個byte
{
cnt++;
if(cnt>=65530)return 0; //超時退出
}
return SPI2->DR; //返回收到的數據
}
/*
函數功能:W25Q64初始化
硬件連接:
MOSI--->PB15
MISO--->PB14
SCLK--->PB13
CS----->PB12
*/
void W25Q64_Init(void)
{
/*1. 開時鐘*/
RCC->APB2ENR|=1<<3; //PB
/*2. 配置GPIO口模式*/
GPIOB->CRH&=0xFFF0FFFF;
GPIOB->CRH|=0x00030000;
W25Q64_CS=1; //未選中芯片
SPI_Init(); //SPI初始化
}
/*
函數功能:讀取芯片的ID號
*/
u16 W25Q64_ReadID(void)
{
u16 id;
/*1. 拉低片選*/
W25Q64_CS=0;
/*2. 發送讀取ID的指令*/
SPI_ReadWriteOneByte(0x90);
/*3. 發送24位的地址-0*/
SPI_ReadWriteOneByte(0);
SPI_ReadWriteOneByte(0);
SPI_ReadWriteOneByte(0);
/*4. 讀取芯片的ID*/
id=SPI_ReadWriteOneByte(0xFF)<<8;
id|=SPI_ReadWriteOneByte(0xFF);
/*5. 拉高片選*/
W25Q64_CS=1;
return id;
}
/*
函數功能:檢測W25Q64狀態
*/
void W25Q64_CheckStat(void)
{
u8 stat=1;
while(stat&1<<0)
{
W25Q64_CS=0; //選中芯片
SPI_ReadWriteOneByte(0x05); //發送讀狀態寄存器1指令
stat=SPI_ReadWriteOneByte(0xFF); //讀取狀態
W25Q64_CS=1; //取消選中芯片
}
}
/*
函數功能:頁編程
說 明:一頁最多寫256個字節。 寫數據之前,必須保證空間是0xFF
函數參數:
u32 addr:頁編程起始地址
u8 *buff:寫入的數據緩沖區
u16 len :寫入的字節長度
*/
void W25Q64_PageWrite(u32 addr,u8 *buff,u16 len)
{
u16 i;
W25Q64_Enabled(); //寫使能
W25Q64_CS=0; //選中芯片
SPI_ReadWriteOneByte(0x02); //頁編程指令
SPI_ReadWriteOneByte(addr>>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
for(i=0;i>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
for(i=0;i>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
W25Q64_CS=1; //取消選中芯片
W25Q64_CheckStat(); //檢測芯片忙狀態
}
/*
函數功能:寫使能
*/
void W25Q64_Enabled(void)
{
W25Q64_CS=0; //選中芯片
SPI_ReadWriteOneByte(0x06); //寫使能
W25Q64_CS=1; //取消選中芯片
}
/*
函數功能:指定位置寫入指定個數的數據,不考慮擦除問題
注意事項:W25Q64只能將1寫為,不能將0寫為1。
函數參數:
u32 addr---寫入數據的起始地址
u8 *buff---寫入的數據
u32 len---長度
*/
void W25Q64_WriteByteDataNoCheck(u32 addr,u8 *buff,u32 len)
{
u32 page_remain=256-addr%256; //計算當前頁還可以寫下多少數據
if(len<=page_remain) //如果當前寫入的字節長度小于剩余的長度
{
page_remain=len;
}
while(1)
{
W25Q64_PageWrite(addr,buff,page_remain);
if(page_remain==len)break; //表明數據已經寫入完畢
buff+=page_remain; //buff向后偏移地址
addr+=page_remain; //起始地址向后偏移
len-=page_remain; //減去已經寫入的字節數
if(len>256)page_remain=256; //如果大于一頁,每次就直接寫256字節
else page_remain=len;
}
}
/*
函數功能:指定位置寫入指定個數的數據,考慮擦除問題,完善代碼
函數參數:
u32 addr---寫入數據的起始地址
u8 *buff---寫入的數據
u32 len---長度
說明:擦除的最小單位扇區,4096字節
*/
static u8 W25Q64_READ_WRITE_CHECK_BUFF[4096];
void W25Q64_WriteByteData(u32 addr,u8 *buff,u32 len)
{
u32 i;
u32 len_w;
u32 sector_addr; //存放扇區的地址
u32 sector_move; //扇區向后偏移的地址
u32 sector_size; //扇區大小。(剩余的空間大小)
u8 *p=W25Q64_READ_WRITE_CHECK_BUFF;//存放指針
sector_addr=addr/4096; //傳入的地址是處于第幾個扇區
sector_move=addr%4096; //計算傳入的地址存于當前的扇區的偏移量位置
sector_size=4096-sector_move; //得到當前扇區剩余的空間
if(len<=sector_size)
{
sector_size=len; //判斷第一種可能性、一次可以寫完
}
while(1)
{
W25Q64_ReadByteData(addr,p,sector_size); //讀取剩余扇區里的數據
for(i=0;i4096) //表明還可以寫一個扇區
{
sector_size=4096;//繼續寫一個扇區
}
else
{
sector_size=len; //剩余的空間可以寫完
}
}
}
;i++)>;i++)buff[i]=spi_readwriteonebyte(0xff);>;i++)>
4.2STM32采用硬件SPI讀寫W25Q64示例代碼
#include "spi.h"
/*
函數功能:SPI初始化(模擬SPI)
硬件連接:
MISO--->PB14
MOSI--->PB15
SCLK--->PB13
*/
void SPI_Init(void)
{
/*1. 開時鐘*/
RCC->APB2ENR|=1<<3; //PB
/*2. 配置GPIO口模式*/
GPIOB->CRH&=0x000FFFFF;
GPIOB->CRH|=0x38300000;
/*3. 上拉*/
SPI_MOSI=1;
SPI_MISO=1;
SPI_SCLK=1;
}
/*
函數功能:SPI讀寫一個字節
*/
u8 SPI_ReadWriteOneByte(u8 data_tx)
{
u8 data_rx=0; //存放讀取的數據
u8 i;
for(i=0;i<8;i++)
{
SPI_SCLK=0; //準備發送數據
if(data_tx&0x80)SPI_MOSI=1;
else SPI_MOSI=0;
data_tx<<=1; //依次發送最高位
SPI_SCLK=1; //表示主機數據發送完成,表示從機發送完畢
data_rx<<=1; //表示默認接收的是0
if(SPI_MISO)data_rx|=0x01;
}
return data_rx;
}
#include "W25Q64.h"
/*
函數功能:W25Q64初始化
硬件連接:
MOSI--->PB15
MISO--->PB14
SCLK--->PB13
CS----->PB12
*/
void W25Q64_Init(void)
{
/*1. 開時鐘*/
RCC->APB2ENR|=1<<3; //PB
/*2. 配置GPIO口模式*/
GPIOB->CRH&=0xFFF0FFFF;
GPIOB->CRH|=0x00030000;
W25Q64_CS=1; //未選中芯片
SPI_Init(); //SPI初始化
}
/*
函數功能:讀取芯片的ID號
*/
u16 W25Q64_ReadID(void)
{
u16 id;
/*1. 拉低片選*/
W25Q64_CS=0;
/*2. 發送讀取ID的指令*/
SPI_ReadWriteOneByte(0x90);
/*3. 發送24位的地址-0*/
SPI_ReadWriteOneByte(0);
SPI_ReadWriteOneByte(0);
SPI_ReadWriteOneByte(0);
/*4. 讀取芯片的ID*/
id=SPI_ReadWriteOneByte(0xFF)<<8;
id|=SPI_ReadWriteOneByte(0xFF);
/*5. 拉高片選*/
W25Q64_CS=1;
return id;
}
/*
函數功能:檢測W25Q64狀態
*/
void W25Q64_CheckStat(void)
{
u8 stat=1;
while(stat&1<<0)
{
W25Q64_CS=0; //選中芯片
SPI_ReadWriteOneByte(0x05); //發送讀狀態寄存器1指令
stat=SPI_ReadWriteOneByte(0xFF); //讀取狀態
W25Q64_CS=1; //取消選中芯片
}
}
/*
函數功能:頁編程
說 明:一頁最多寫256個字節。 寫數據之前,必須保證空間是0xFF
函數參數:
u32 addr:頁編程起始地址
u8 *buff:寫入的數據緩沖區
u16 len :寫入的字節長度
*/
void W25Q64_PageWrite(u32 addr,u8 *buff,u16 len)
{
u16 i;
W25Q64_Enabled(); //寫使能
W25Q64_CS=0; //選中芯片
SPI_ReadWriteOneByte(0x02); //頁編程指令
SPI_ReadWriteOneByte(addr>>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
for(i=0;i>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
for(i=0;i>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
W25Q64_CS=1; //取消選中芯片
W25Q64_CheckStat(); //檢測芯片忙狀態
}
/*
函數功能:寫使能
*/
void W25Q64_Enabled(void)
{
W25Q64_CS=0; //選中芯片
SPI_ReadWriteOneByte(0x06); //寫使能
W25Q64_CS=1; //取消選中芯片
}
/*
函數功能:指定位置寫入指定個數的數據,不考慮擦除問題
注意事項:W25Q64只能將1寫為,不能將0寫為1。
函數參數:
u32 addr---寫入數據的起始地址
u8 *buff---寫入的數據
u32 len---長度
*/
void W25Q64_WriteByteDataNoCheck(u32 addr,u8 *buff,u32 len)
{
u32 page_remain=256-addr%256; //計算當前頁還可以寫下多少數據
if(len<=page_remain) //如果當前寫入的字節長度小于剩余的長度
{
page_remain=len;
}
while(1)
{
W25Q64_PageWrite(addr,buff,page_remain);
if(page_remain==len)break; //表明數據已經寫入完畢
buff+=page_remain; //buff向后偏移地址
addr+=page_remain; //起始地址向后偏移
len-=page_remain; //減去已經寫入的字節數
if(len>256)page_remain=256; //如果大于一頁,每次就直接寫256字節
else page_remain=len;
}
}
/*
函數功能:指定位置寫入指定個數的數據,考慮擦除問題,完善代碼
函數參數:
u32 addr---寫入數據的起始地址
u8 *buff---寫入的數據
u32 len---長度
說明:擦除的最小單位扇區,4096字節
*/
static u8 W25Q64_READ_WRITE_CHECK_BUFF[4096];
void W25Q64_WriteByteData(u32 addr,u8 *buff,u32 len)
{
u32 i;
u32 sector_addr; //存放扇區的地址
u32 sector_move; //扇區向后偏移的地址
u32 sector_size; //扇區大小。(剩余的空間大小)
u8 *p=W25Q64_READ_WRITE_CHECK_BUFF;//存放指針
sector_addr=addr/4096; //傳入的地址是處于第幾個扇區
sector_move=addr%4096; //計算傳入的地址存于當前的扇區的偏移量位置
sector_size=4096-sector_move; //得到當前扇區剩余的空間
if(len<=sector_size)
{
sector_size=len; //判斷第一種可能性、一次可以寫完
}
while(1)
{
W25Q64_ReadByteData(addr,p,sector_size); //讀取剩余扇區里的數據
for(i=0;i4096) //表明還可以寫一個扇區
{
sector_size=4096;//繼續寫一個扇區
}
else
{
sector_size=len; //剩余的空間可以寫完
}
}
}
;i++)>;i++)buff[i]=spi_readwriteonebyte(0xff);>;i++)>
審核編輯:符乾江 -
STM32
+關注
關注
2282文章
10984瀏覽量
361043 -
SPI總線
+關注
關注
4文章
104瀏覽量
27881
發布評論請先 登錄
相關推薦
W25Q64串行FLASH基礎知識大小


【STM32Cube-18】使用硬件QSPI讀寫SPI Flash(W25Q64)

STM32入門開發: 介紹SPI總線、讀寫W25Q64(FLASH)(硬件+模擬時序)
STM32單片機基礎18——使用硬件QSPI讀寫SPI Flash(W25Q64)
剖析STM32F103讀寫W25Q64
Linux驅動開發-編寫W25Q64(Flash)驅動
STM32 SPI讀寫W25Q64(二)
STM32 SPI讀寫W25Q64(三)

STM32驅動FLASH(W25Q64)





 工商網監
工商網監
評論