") 利用傳感器數字部分完成對汽車雷達IC設計的驗證
利用傳感器數字部分完成對汽車雷達IC設計的驗證
在 NXP,我們團隊開發(fā)了一種新方法學來驗證汽車雷達集成電路 (IC) 的設計。該左移(或稱“流程前置”)方法學將規(guī)格書級別指標的早期驗證與虛擬現場試驗相結合。
我們關注規(guī)格書級別的指標而不是硬件實現級別的指標,從而確保用來評估設計的驗證簽核 (signoff) 標準與客戶最關心的標準一致。
此外,通過在虛擬現場試驗中仿真路試場景,我們可以使用真實測試激勵對雷達 IC 硬件進行環(huán)境在環(huán)驗證。
我們的客戶中有相當一部分是一線汽車供應商,他們最關心的就是規(guī)格書中的各項性能指標,比如信噪比 (SNR) 和總諧波失真 (THD)。
他們反倒不太關心大多數 IC 驗證團隊會關心的一些主要指標,比如單個組件測試結果、代碼覆蓋率結果,以及其他硬件實現級別的指標。
另外,我們的客戶利用現場試驗和真實駕駛場景來評估完整的雷達系統(tǒng),而 IC 驗證團隊則使用與真實信號相去甚遠的測試圖形來評估單個射頻、模擬和數字組件(圖 1)。
我和所在團隊定義并實現了左移(或稱“流程前置”)方法學,使得我們驗證 IC 設計的流程與客戶評估 IC 設計的標準保持一致。
我們開發(fā)用于虛擬現場試驗的路試駕駛場景基于許多客戶所遵循的 Euro NCAP 標準。
我們生成的功能和性能指標(如 SNR)與客戶評估自己產品中的 IC 組件所用的指標相同。
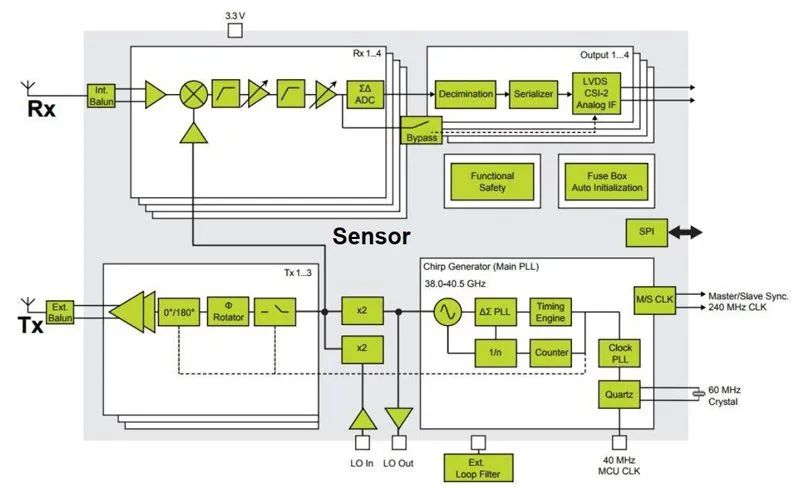
圖 1.包含射頻、模擬和數字子系統(tǒng)的汽車雷達系統(tǒng)架構
規(guī)格書級別指標的早期驗證
過去,我的團隊采用一種基于通用驗證方法學 (UVM) 的方法來驗證汽車雷達系統(tǒng)的數字部分。這種方法需要使用高級語言創(chuàng)建一個參考模型來復制待測設計 (DUT) 的功能。給定輸入測試向量,比較 DUT 的輸出與參考模型的輸出。UVM 測試并不捕獲 SNR 測量值或者客戶關心的其他指標。并且,即使實現只有相對很小的更改(比如更新有限脈沖響應 (FIR) 濾波器的系數),測試平臺都要做出相應更改。保持測試平臺與實現的同步需要相當多的精力和時間。
鑒于此方法的缺點和局限性,我們沒有把驗證精力放在實現與參考模型的一一對應上,而是決定重點關注設計的功能和性能。我們開發(fā)了 MATLAB算法,不僅能計算 SNR、THD 和功率譜密度 (PSD) 等高級設計指標,也能計算濾波器和其他組件的指標,比如阻帶衰減和通帶波紋。我們使用 HDL Verifier,基于這些 MATLAB 算法生成 SystemVerilog DPI 組件,并將它們集成到 HDL 測試平臺,用于 Cadence 仿真環(huán)境(圖 2)。
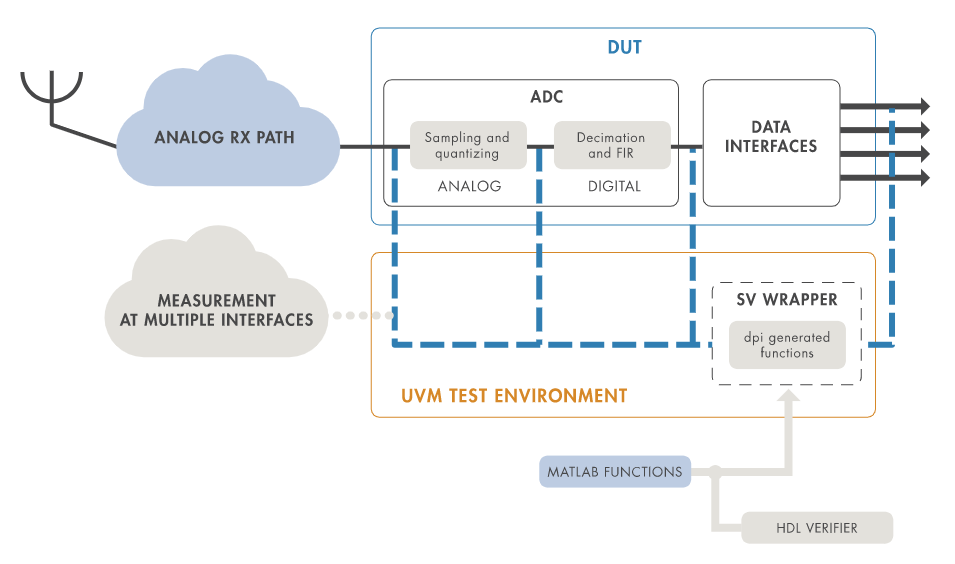
圖 2:一個使用 MATLAB 驗證函數的測試環(huán)境,函數借助 HDL Verifier 通過 DPI-C 在 SystemVerilog 封裝中實現。
采樣信號數據通過 DUT 進行采集,然后傳遞給 MATLAB 驗證代碼所產生的 DPI-C 函數。繪制測試結果圖(圖 3),并與系統(tǒng)需求進行對比,以確保設計符合規(guī)格書。
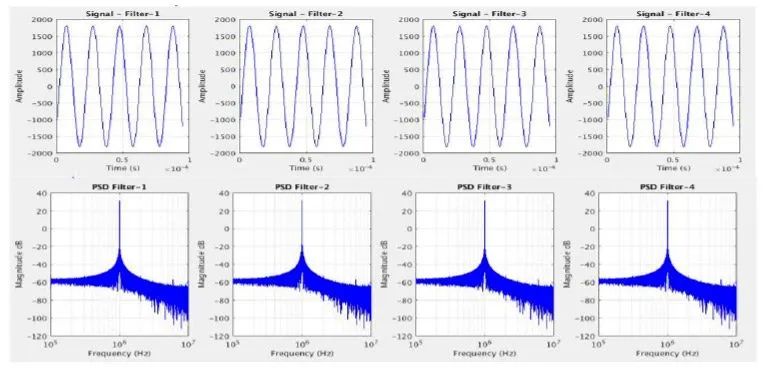
圖 3:采樣信號(上)和 MATLAB 計算得出的功率譜密度圖(下)。
使用 MATLAB 生成的 DPI-C 模型,我們可以在 Cadence HDL 驗證環(huán)境中的多個接口上對功能指標和性能指標進行計算。我們可以將設計的實現和驗證分離開來,并在更契合客戶所關心指標的抽象級別上進行測試。
我們還可以重用 MATLAB 生成的 C 代碼,對初次流片的測試結果進行分析。比如,我們從雷達傳感器 IC 收集采樣數據,然后將這些數據傳遞給用于計算 SNR 的 C 函數。這些函數由 MATLAB 生成,同時也用于在 SystemVerilog 中驗證我們的設計。
虛擬現場試驗
在過渡到指標驅動的驗證方法時,我們使用真實駕駛場景數據進行虛擬現場試驗。以前,我們使用不同的測試向量集分別驗證每個射頻、模擬和數字子系統(tǒng)。這些測試向量中,只有極少數提取自路試過程中所捕獲的雷達反射。
如今,我們已在這一方法學中納入環(huán)境在環(huán)驗證。現在,我們利用 Automated Driving Toolbox 中的駕駛場景設計器(圖 4)構建駕駛場景。該 App 中的預置場景代表了 Euro NCAP 測試協(xié)議。這些協(xié)議正是客戶評估雷達系統(tǒng)性能的基準。
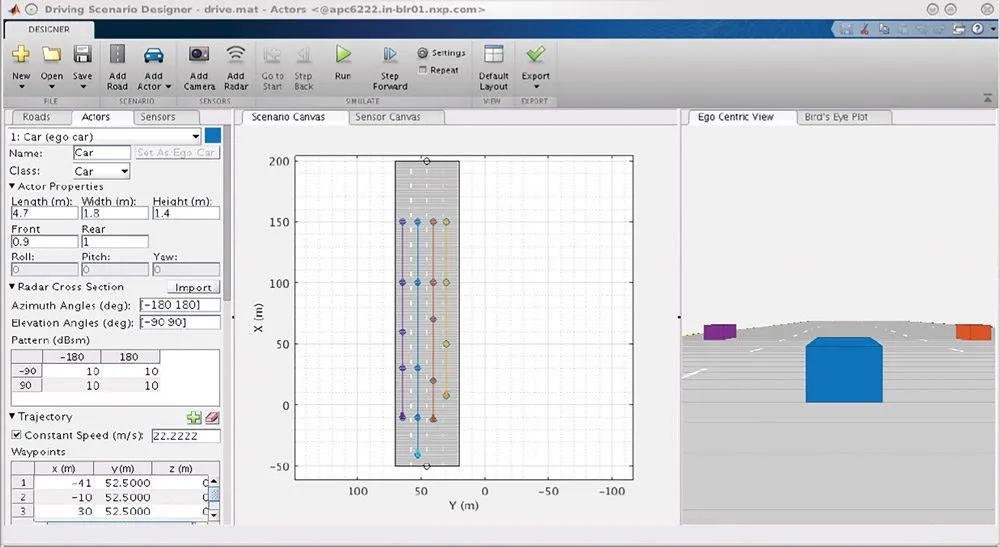
圖 4:Automated Driving Toolbox 中的駕駛場景設計器。
下一步,我們用 Phased Array Toolbox 構建一個雷達傳感器模型。為了讓此模型符合實際所用傳感器的規(guī)格書,我們調整了有關天線孔徑、峰值發(fā)射功率、接收機噪聲系數以及天線單元數量的參數。此外還調整了影響調頻連續(xù)波 (FMCW) 波形的某些參數,比如最大距離、線性調頻時長、掃描帶寬和采樣率。我們把這個傳感器模型集成到之前構建的駕駛場景中,將雷達傳感器虛擬地安裝在自主車輛上(圖 5)。
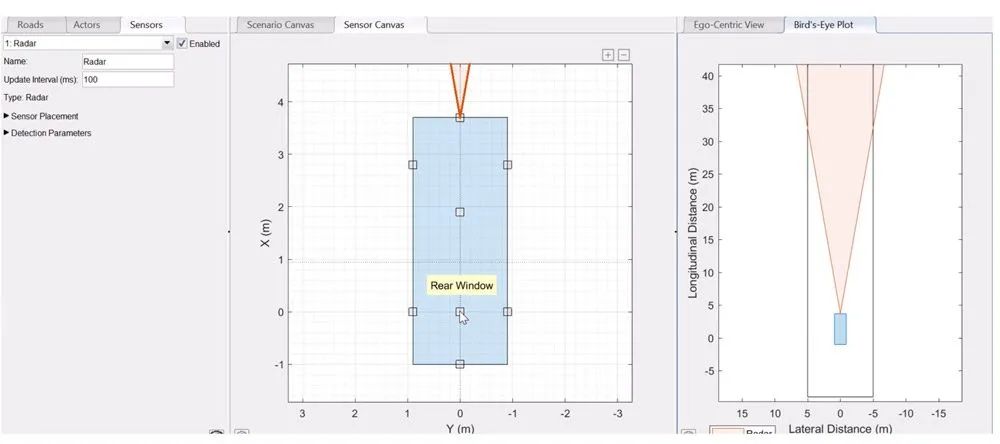
圖 5:用于管理自主車輛上雷達傳感器位置的界面。
接下來我們執(zhí)行這個駕駛場景,并捕獲傳感器的混頻器輸出,即場景中目標的雷達反射的解線性調頻信號。我們將這個解線性調頻信號傳遞給 ADC 設計中的 Simulink 模型,以生成數字 IQ 數據,然后把這些數據饋送給數字基帶處理鏈。
如此一來,我們就可以生成基于 Euro NCAP 駕駛場景的 IQ 數據,并在研發(fā)的早期階段(可能早于初次流片一年甚至更多)進行數字處理鏈的虛擬現場試驗(圖 6)。
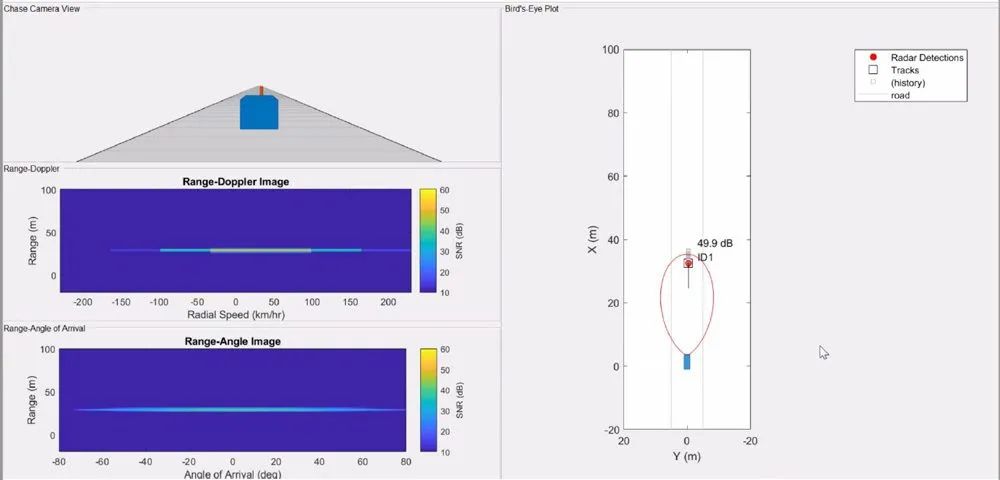
圖 6:虛擬現場試驗的跟拍視圖(左上)和鳥瞰視圖(右)。
后續(xù)工作
新的方法學和工作流現已推廣應用至下一代的雷達收發(fā)機。對于這些產品,我們會在場景中納入環(huán)境效應,以了解我們的設計在雨霧天氣等情況下的性能表現。
我們認識到,這一新的驗證方法學并不僅僅適用于汽車雷達系統(tǒng)的數字組件,所以我們也期望將虛擬現場試驗用于模擬組件和其他應用場景,比如車輛之間的通信系統(tǒng)。
這篇文章重點介紹了傳感器實現中數字部分的驗證,但是這一環(huán)境在環(huán)方法也可輕松推廣應用到混合信號和射頻設計中,比如傳感器設計中的 ADC。
審核編輯:郭婷
-
傳感器
+關注
關注
2564文章
52665瀏覽量
764208 -
汽車電子
+關注
關注
3035文章
8264瀏覽量
169642 -
雷達
+關注
關注
50文章
3089瀏覽量
119500
原文標題:汽車專題 | 汽車雷達 IC 設計的環(huán)境在環(huán)驗證
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
24GHZ雷達傳感器的選型及運用基礎
【RSP1多普勒雷達傳感器申請】車載相控陣防撞雷達系統(tǒng)
毫米波汽車雷達測試小結
雷達傳感器的新型熱門應用
雷達傳感器的新型熱門應用
汽車毫米波雷達傳感器的性能一致性
汽車傳感器測試有什么特點?
汽車電子傳感器發(fā)展現狀及趨勢是什么
如何布局汽車傳感器、汽車雷達測試設備
如何利用毫米波雷達和圖像傳感器構建智能駕駛控制系統(tǒng)?
汽車雷達傳感器的解決方案
Ameya360:瑞薩電子完成對Steradian的收購 擴大雷達市場的影響力






 工商網監(jiān)
工商網監(jiān)
評論