") 使用NVIDIA CUDA-Pointpillars檢測點云中的對象
使用NVIDIA CUDA-Pointpillars檢測點云中的對象

點云是坐標系中的點數(shù)據(jù)集。點包含豐富的信息,包括三維坐標(X、Y、Z)、顏色、分類值、強度值和時間等。點云主要來自于各種NVIDIA Jetson用例中常用的激光雷達,如自主機器、感知模塊和3D建模。
其中一個關鍵應用是利用遠程和高精度的數(shù)據(jù)集來實現(xiàn)3D對象的感知、映射和定位算法。
PointPillars是最常用于點云推理的模型之一。本文將探討為Jetson開發(fā)者提供的NVIDIA CUDA加速PointPillars模型。馬上下載CUDA-PointPillars模型。
什么是CUDA-Pointpillars
本文所介紹的CUDA-Pointpillars可以檢測點云中的對象。其流程如下:
基本預處理:生成柱體。
預處理:生成BEV特征圖(10個通道)。
用于TensorRT的ONNX模型:通過TensorRT實現(xiàn)的ONNX模式。
后處理:通過解析TensorRT引擎輸出生成邊界框。

圖 1 。 CUDA 點柱管道。
基本預處理
基本預處理步驟將點云轉換為基本特征圖。基本特征圖包含以下組成部分:
基本特征圖。
柱體坐標:每根柱體的坐標。
參數(shù):柱體數(shù)量。
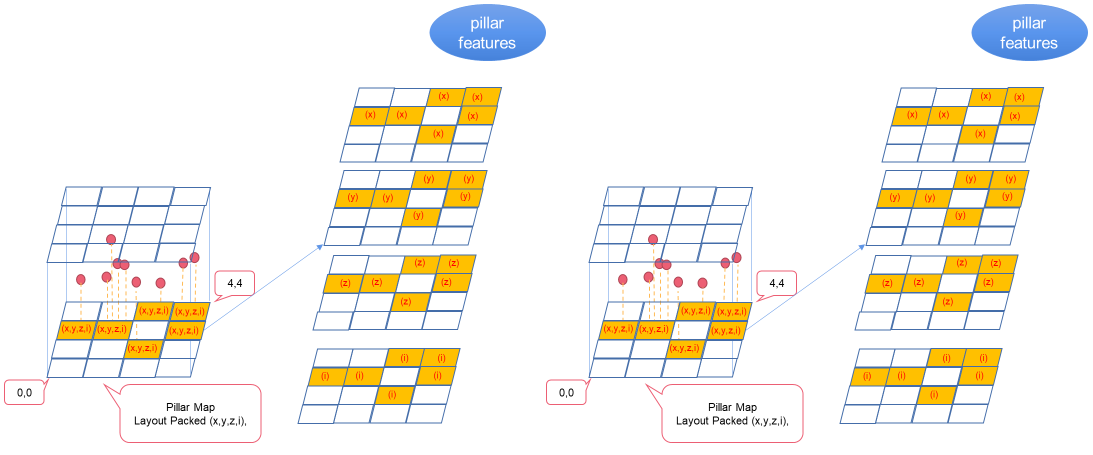
圖 2 。將點云轉換為基礎要素地圖
預處理
預處理步驟將基本特征圖(4個通道)轉換為 BEV 特征圖(10個通道)。
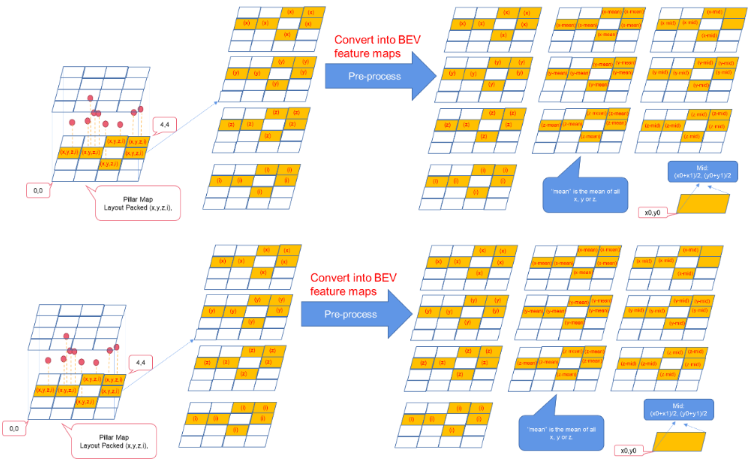
圖 3 。將基本要素地圖轉換為 BEV 要素地圖
用于TensorRT的ONNX模型
出于以下原因修改OpenPCDet的原生點柱:
小型操作過多,并且內存帶寬低。
NonZero等一些TensorRT不支持的操作。
ScatterND等一些性能較低的操作。
使用“dict”作為輸入和輸出,因此無法導出ONNX文件。
為了從原生OpenPCDet導出ONNX,我們修改了該模型(圖4)。
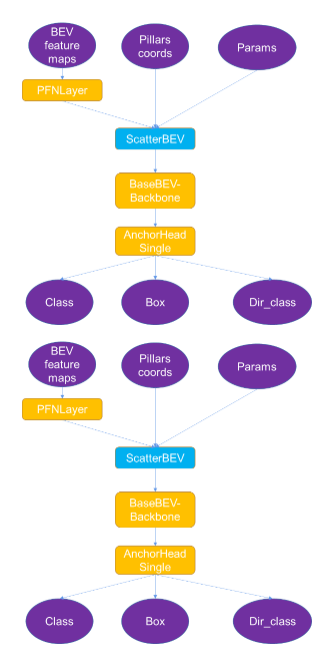
圖 4 。 CUDA Pointpillars 中 ONNX 模型概述。
您可把整個ONNX文件分為以下幾個部分:
輸入:BEV特征圖、柱體坐標、參數(shù),均在預處理中生成。
輸出:類、框、Dir_class,在后處理步驟中解析后生成一個邊界框。
ScatterBEV:將點柱(一維)轉換為二維圖像,可作為TensorRT的插件。
其他:TensorRT支持的其他部分。
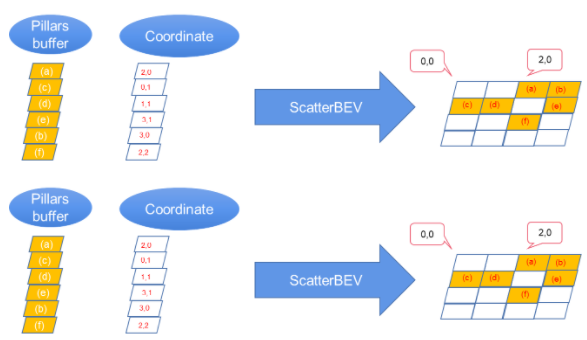
圖 5 。將點支柱數(shù)據(jù)散射到二維主干的二維圖像中。
后處理
在后處理步驟中解析TensorRT引擎的輸出(class、box和dir_class)和輸出邊界框。圖6所示的是示例參數(shù)。
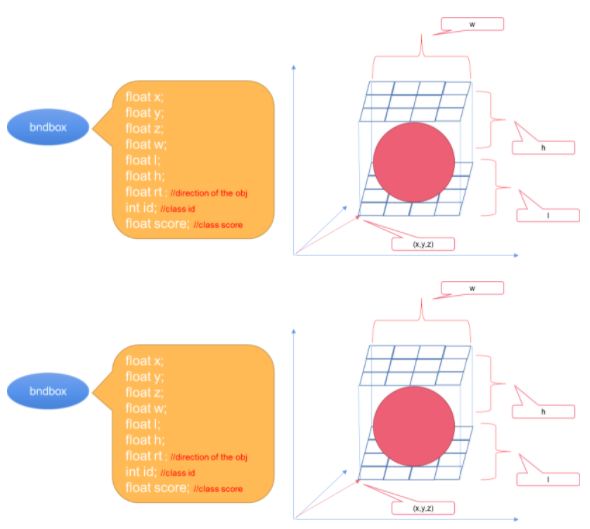
圖 6 。邊界框的參數(shù)。
使用 CUDA PointPillars
若要使用CUDA-PointPillars,需要提供點云的ONNX模式文件和數(shù)據(jù)緩存:
std::vectornms_pred; PointPillar pointpillar(ONNXModel_File, cuda_stream); pointpillar.doinfer(points_data, points_count, nms_pred);
將OpenPCDet訓練的原生模型轉換為CUDA-Pointpillars的ONNX文件
我們在項目中提供了一個Python腳本,可以將OpenPCDet訓練的原生模型轉換成CUDA-Pointpillars的ONNX文件。可在CUDA-Pointpillars的/tool 目錄下找到exporter.py 腳本。
可在當前目錄下運行以下命令獲得pointpillar.onnx文件:
$ python exporter.py --ckpt ./*.pth
性能
下表顯示了測試環(huán)境和性能。在測試之前提升CPU和GPU的性能。
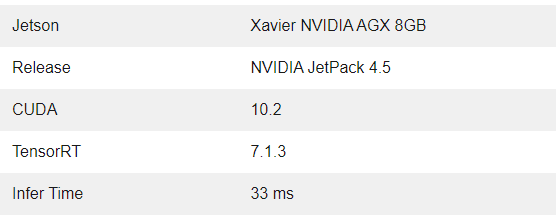
表 1 測試平臺與性能
開始使用 CUDA PointPillars
本文介紹了什么是CUDA-PointPillars以及如何使用它來檢測點云中的對象。
由于原生OpenPCDet無法導出ONNX,而且對于TensorRT來說,性能較低的小型操作數(shù)量過多,因此我們開發(fā)了CUDA-PointPillars。該應用可以將OpenPCDet訓練的原生模型導出為特殊的ONNX模型,并通過TensorRT推斷ONNX模型。
關于作者
Lei Fan 是 NVIDIA 的高級 CUDA 軟件工程師。他目前正與 TSE 中國團隊合作,開發(fā)由 CUDA 優(yōu)化軟件性能的解決方案。
Lily Li 正在為 NVIDIA 的機器人團隊處理開發(fā)人員關系。她目前正在 Jetson 生態(tài)系統(tǒng)中開發(fā)機器人技術解決方案,以幫助創(chuàng)建最佳實踐。
審核編輯:郭婷
-
NVIDIA
+關注
關注
14文章
5275瀏覽量
105996 -
數(shù)據(jù)集
+關注
關注
4文章
1223瀏覽量
25339
發(fā)布評論請先 登錄
NVIDIA攜手Ansys和DCAI推進流體動力學量子算法發(fā)展
借助NVIDIA技術加速半導體芯片制造
使用NVIDIA CUDA-X庫加速科學和工程發(fā)展
為什么無法使用圖像文件夾執(zhí)行對象檢測Python演示?
使用Yolo-v3-TF運行OpenVINO?對象檢測Python演示時的結果不準確的原因?
NVIDIA推出DRIVE AI安全檢測實驗室
NVIDIA加速全球大多數(shù)超級計算機推動科技進步

NVIDIA與谷歌量子AI部門達成合作
NVIDIA 助力谷歌量子 AI 通過量子器件物理學模擬加快處理器設計
怎么在TMDSEVM6678: 6678自帶的FFT接口和CUDA提供CUFFT函數(shù)庫選擇?
IB Verbs和NVIDIA DOCA GPUNetIO性能測試





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論