") 伺服電機(jī)通過什么與PLC進(jìn)行連接
伺服電機(jī)通過什么與PLC進(jìn)行連接
伺服系統(tǒng)是工業(yè)自動(dòng)化控制項(xiàng)目里經(jīng)常要用到的執(zhí)行機(jī)構(gòu)。啥是執(zhí)行機(jī)構(gòu),就是實(shí)際動(dòng)手干活的那部分。拿PLC與伺服系統(tǒng)來說,PLC就是控制器,相當(dāng)于人的大腦,而伺服系統(tǒng)相當(dāng)于人的手和腳等等。人想要走路,大腦會(huì)發(fā)出走路的神經(jīng)信號,通過神經(jīng)系統(tǒng)傳達(dá)給腿,傳達(dá)給腳。在實(shí)際走路的過程中,走路帶來的觸感又會(huì)通過神經(jīng)系統(tǒng)反饋回人的大腦,形成閉路。其實(shí),伺服系統(tǒng)的工作過程也是這樣的,我們簡單來說下。
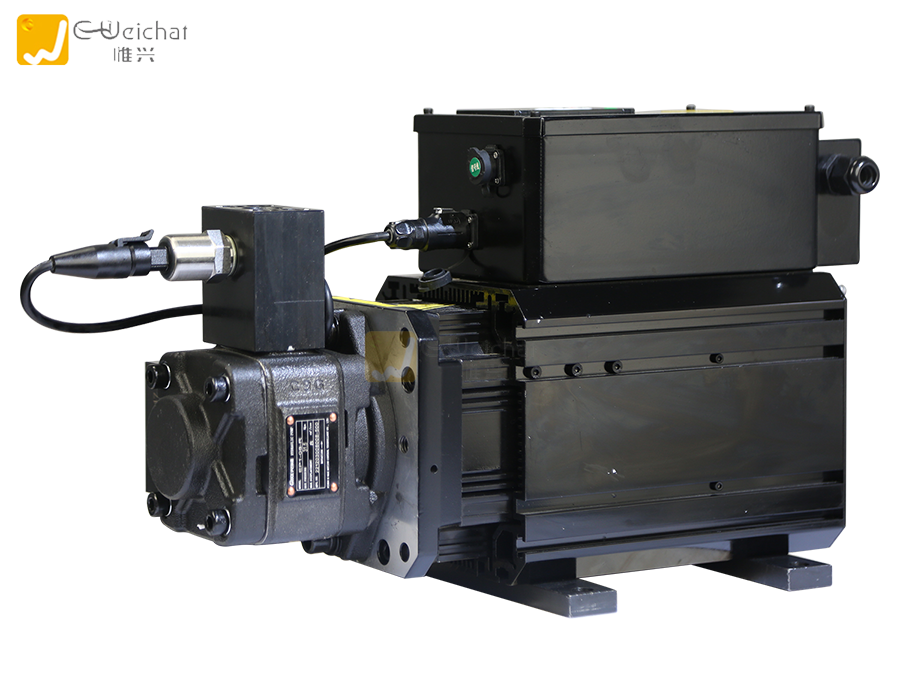
一般伺服系統(tǒng)由三部分構(gòu)成,即電機(jī)本體、驅(qū)動(dòng)器以及編碼器。驅(qū)動(dòng)器負(fù)責(zé)驅(qū)動(dòng)電機(jī)的運(yùn)行,電機(jī)每接收到一個(gè)脈沖信號,就會(huì)進(jìn)行一定位置的移動(dòng)。在電機(jī)轉(zhuǎn)動(dòng)的同時(shí),會(huì)有一個(gè)脈沖信號生成出來。伺服系統(tǒng)中的編碼器,就是為了對照伺服接收的脈沖以及生成的脈沖而存在的。如果兩個(gè)脈沖差異較大,編碼器就會(huì)予以糾正,通過這樣的閉路控制,讓伺服電機(jī)精準(zhǔn)進(jìn)行移動(dòng)。
現(xiàn)在的伺服系統(tǒng)多采用無刷結(jié)構(gòu)的交流電機(jī)進(jìn)行工作,因?yàn)闆]有電刷結(jié)構(gòu),所以耗電量更少,產(chǎn)生的電磁干擾少,幾乎無磨損情況,避免了長時(shí)間工作還要進(jìn)行內(nèi)部清理的尷尬。那么,伺服電機(jī)通過什么與PLC進(jìn)行連接呢?CANopen總線就行,它就能夠?qū)崿F(xiàn)一主多從的控制,讓伺服電機(jī)實(shí)現(xiàn)位置控制、轉(zhuǎn)矩控制和速度控制。
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
53文章
8330瀏覽量
147301 -
plc
+關(guān)注
關(guān)注
5020文章
13406瀏覽量
466171 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2062瀏覽量
58374
發(fā)布評論請先 登錄
相關(guān)推薦
三菱PLC伺服控制系統(tǒng)介紹
伺服電機(jī)連接器:長時(shí)間工作下的忠誠伙伴
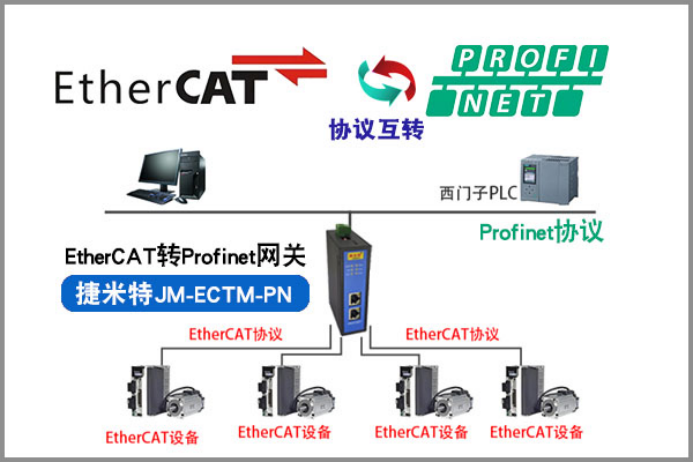
基于 EtherCAT 轉(zhuǎn) ProfiNet 網(wǎng)關(guān)達(dá)成西門子 1200 PLC 與伺服電機(jī)通訊連接的應(yīng)用實(shí)例
Modbus轉(zhuǎn)Profinet網(wǎng)關(guān)助力GSHD伺服驅(qū)動(dòng)器與PLC完美連接配置詳解

PLSY指令怎樣控制伺服正反轉(zhuǎn)
交流伺服電機(jī)與直流伺服電機(jī)的對比分析
伺服電機(jī)與PLC協(xié)同控制的實(shí)現(xiàn)方法
PLC如何讀取伺服位置
伺服電機(jī)和plc的關(guān)系
plc控制伺服電機(jī)的指令有哪些
plc如何控制伺服電機(jī)的速度和方向?
松下伺服電機(jī)怎么調(diào)速度
伺服電機(jī)可以通過改電機(jī)的線改變正反轉(zhuǎn)嗎
交流伺服電機(jī)與直流伺服電機(jī)的區(qū)別
伺服電機(jī)對拖測功機(jī)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論