") 由3D石墨烯泡沫集成水凝膠實(shí)現(xiàn)的固有可拉伸運(yùn)動(dòng)傳感器
由3D石墨烯泡沫集成水凝膠實(shí)現(xiàn)的固有可拉伸運(yùn)動(dòng)傳感器

背景介紹
水凝膠柔性傳感器表現(xiàn)出機(jī)械靈活性、形狀適應(yīng)性、制造可擴(kuò)展性和生物相容性,在假肢電子皮膚、異常步態(tài)識(shí)別、虛擬現(xiàn)實(shí)和植入式心臟刺激裝置中具有巨大的潛在應(yīng)用。為了從可拉伸水凝膠傳感器獲取電信號(hào),在變形下保持其性能的導(dǎo)電電極是必不可少的。然而,由于材料要求的沖突,同時(shí)實(shí)現(xiàn)高導(dǎo)電性、顯著的可拉伸性和可靠的電連接是一個(gè)相當(dāng)大的挑戰(zhàn)。
可拉伸性通常有利于松散堆積的長(zhǎng)鏈分子,導(dǎo)致材料硬度低。例如,水凝膠通常具有10-100 kPa的彈性模量,與人體皮膚相當(dāng),使其能夠很好地適應(yīng)軟生物組織。相反,高導(dǎo)電材料需要在密集堆積的晶體結(jié)構(gòu)內(nèi)具有高載流子密度,如銅、金和銀等金屬。這些金屬線/膜通常表現(xiàn)出超過(guò)100 MPa的彈性模量。水凝膠和電極材料之間的剛度差異可能會(huì)導(dǎo)致傳感器電路在實(shí)際應(yīng)用中出現(xiàn)大幅性能波動(dòng)甚至故障。因此,迫切需要具有高導(dǎo)電性和長(zhǎng)期材料穩(wěn)定性的柔性和可拉伸電極。
已經(jīng)提出了各種戰(zhàn)略來(lái)解決這個(gè)問(wèn)題。一種代表性的方法涉及確保軟相和硬相材料的均勻分布,例如利用Au/Ag納米粒子和自粘苯乙烯-乙烯-丁烯-苯乙烯(SEBS)熱塑性彈性體的兩相納米分散界面。另一種常用的策略是對(duì)電極材料進(jìn)行拓?fù)鋬?yōu)化,例如以蛇形圖案排列電極。這些方法可以減輕電極損壞的問(wèn)題。然而,軟硬材料之間的接觸界面仍然廣泛存在。在大變形期間,容易發(fā)生相對(duì)滑動(dòng)并在這些界面處累積,這可能會(huì)導(dǎo)致接觸電阻增加,甚至隨著時(shí)間的推移導(dǎo)致電路故障。理想的解決方案是構(gòu)建可拉伸電路,其中電極材料和水凝膠具有相當(dāng)?shù)膹椥阅A亢脱诱剐裕瑥亩纬晒逃械目衫祀娐贰?/p>
本文亮點(diǎn)
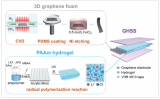
1. 本工作介紹了一種固有可拉伸的石墨烯水凝膠應(yīng)變傳感器(GHSS),該傳感器是通過(guò)將水凝膠和具有非常接近匹配的彈性模量的3D石墨烯泡沫集成在一起而制成的。
2. GHSS的應(yīng)變檢測(cè)限為0.02%,快速響應(yīng)時(shí)間為64毫秒,長(zhǎng)期穩(wěn)定,能夠檢測(cè)人體關(guān)節(jié)運(yùn)動(dòng)、生理信號(hào)、觸摸板輸入和運(yùn)動(dòng)監(jiān)測(cè)。
圖文解析
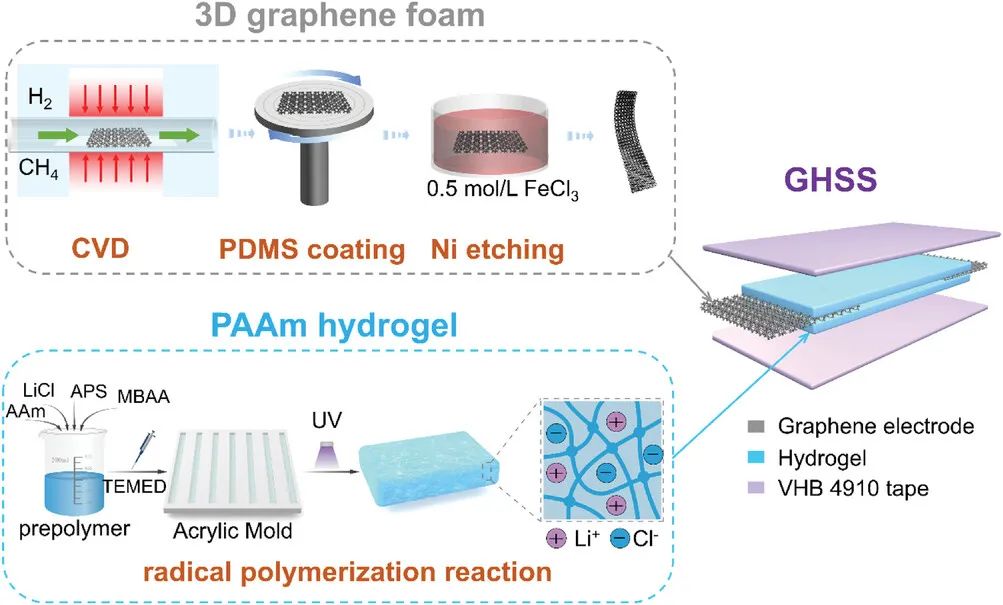
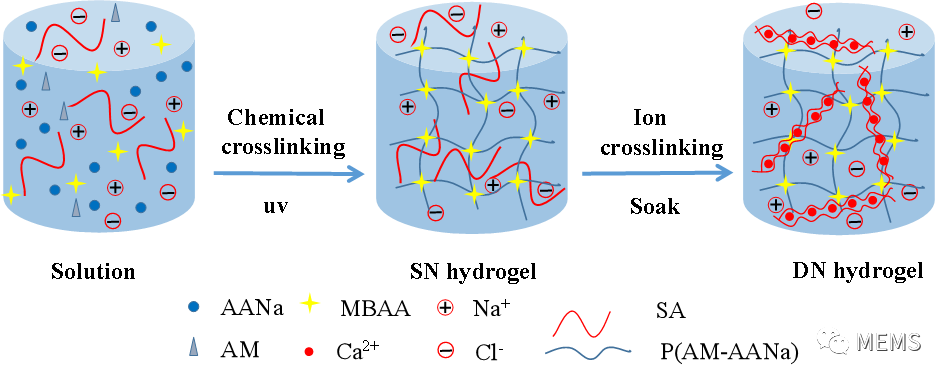
圖1. GHSS的設(shè)計(jì)。GHSS是一種復(fù)合結(jié)構(gòu),包括PAAm水凝膠作為敏感單元和3D石墨烯泡沫作為電極。
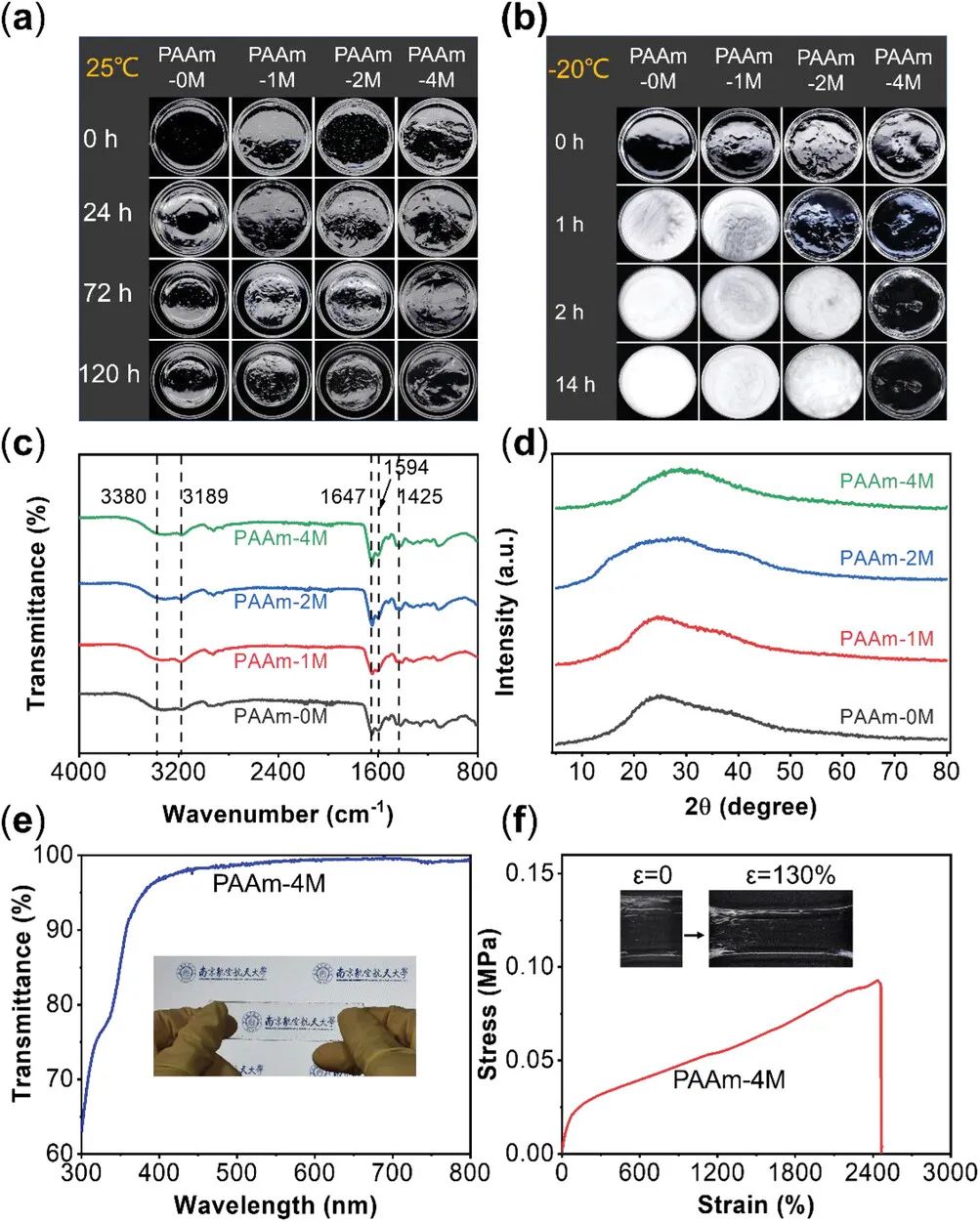
圖2. PAAm水凝膠的性質(zhì)。a) 不同LiCl含量的水凝膠在環(huán)境(25°C,38%RH)中暴露0小時(shí)、24小時(shí)、72小時(shí)和120小時(shí)后的照片。b) 不同LiCl含量的水凝膠在環(huán)境(-20°C)中暴露0小時(shí)、1小時(shí)、2小時(shí)和14小時(shí)后的照片。c) PAAm-0 M、PAAm-1 M、PAAm-2 M和PAAm-4 M水凝膠的傅里葉變換紅外光譜。d) PAAm-0 M、PAAm-1 M、PAAm-2 M和PAAm-4 M水凝膠的XRD衍射圖。e) 2 mm厚水凝膠條的透光率。插圖顯示,通過(guò)水凝膠條,我們可以清楚地看到徽標(biāo)和名稱。f) PAAm-4M水凝膠的應(yīng)力-應(yīng)變曲線。插圖是PAAm水凝膠從0拉伸到130%的照片。
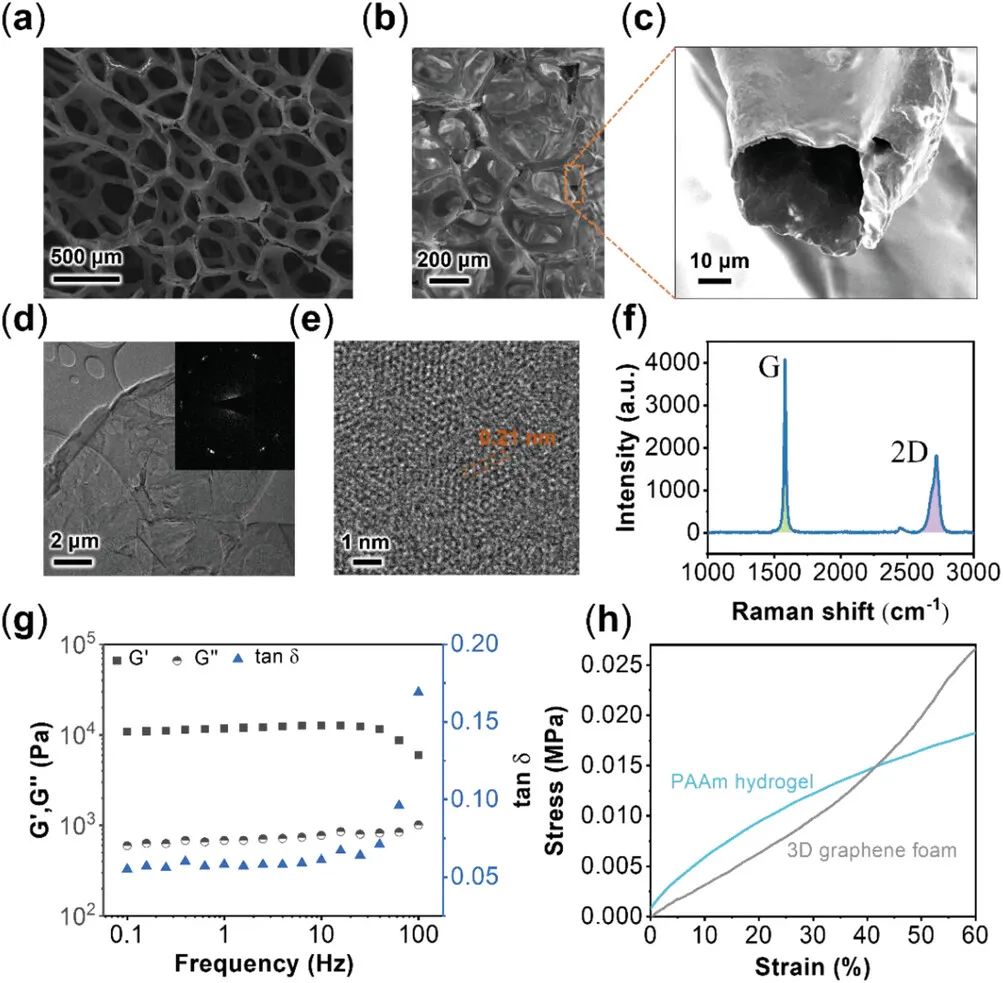
圖3. 3D石墨烯泡沫和水凝膠石墨烯復(fù)合材料的表征。a-c)3D石墨烯泡沫的SEM圖像。d) 石墨烯的TEM圖像。插圖顯示了石墨烯的選區(qū)電子衍射(SAED)圖案。e) 多層石墨烯的高分辨率(HR)TEM圖像。f) 石墨烯泡沫的拉曼光譜。g) 流變測(cè)量顯示了3D石墨烯水凝膠在不同頻率(0.1-100 Hz)下的儲(chǔ)能模量(g′)、損耗模量(g〃)和損耗因子(tanδ)。h) PAAm水凝膠和3D石墨烯泡沫在0至60%的應(yīng)變范圍內(nèi)的應(yīng)力-應(yīng)變曲線。
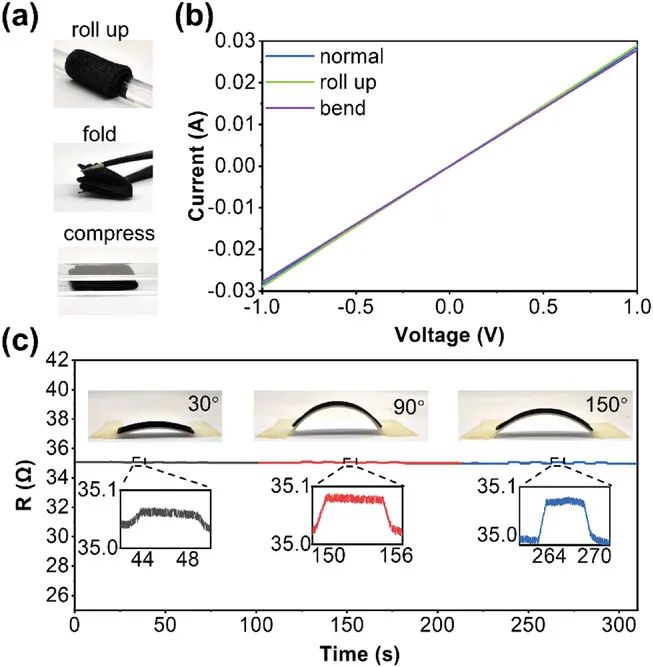
圖4. 石墨烯泡沫電極的電性能。a) 石墨烯泡沫電極被卷起、折疊和壓縮。b) 在-1 V至+1 V的輸入電壓下,施加到石墨烯泡沫電極的電流與電壓的三種狀態(tài)圖。c) 施加矩形波時(shí),石墨烯泡沫電極在不同彎曲度(30°、90°和150°)下的電阻變化。
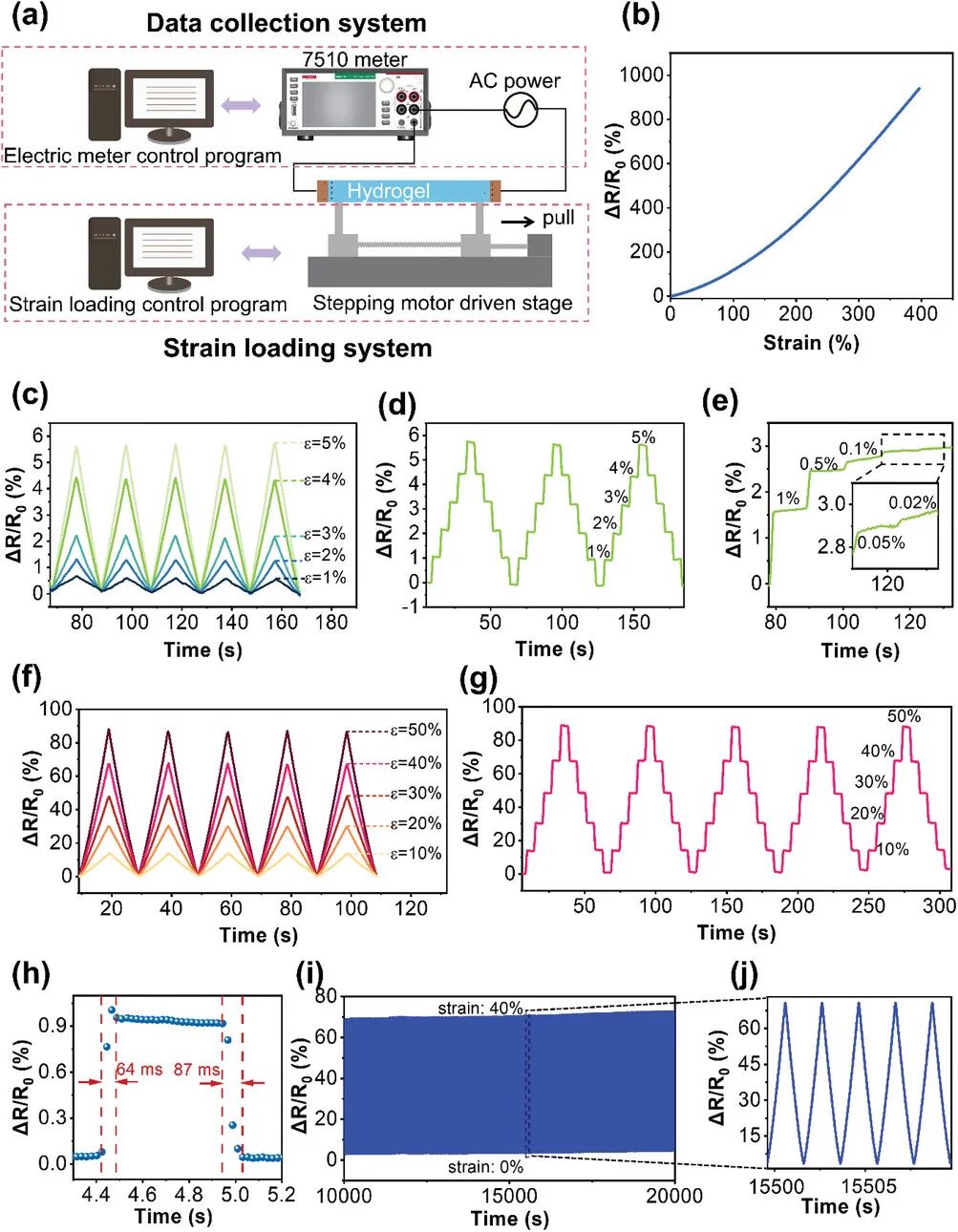
圖5. GHSS的應(yīng)變傳感特性。a) 傳感性能測(cè)試系統(tǒng)的示意圖。b) GHSS的相對(duì)電阻變化與拉伸應(yīng)變之間的關(guān)系。c) d)分別施加三角波形和階梯波形時(shí),GHSS在較小拉伸應(yīng)變(1%、2%、3%、4%和5%)下的相對(duì)電阻變化。e) 在1%的預(yù)應(yīng)變下檢測(cè)微小應(yīng)變。f) g)分別施加三角波形和階梯波形時(shí),GHSS在較大拉伸應(yīng)變(10%、20%、30%、40%和50%)下的相對(duì)電阻變化。h) GHSS在施加1%應(yīng)變下的響應(yīng)曲線。i) GHSS在拉伸應(yīng)變(0-40%)下進(jìn)行了5000多次加載/卸載循環(huán)的測(cè)試;j) 插圖是五個(gè)周期的放大視圖。
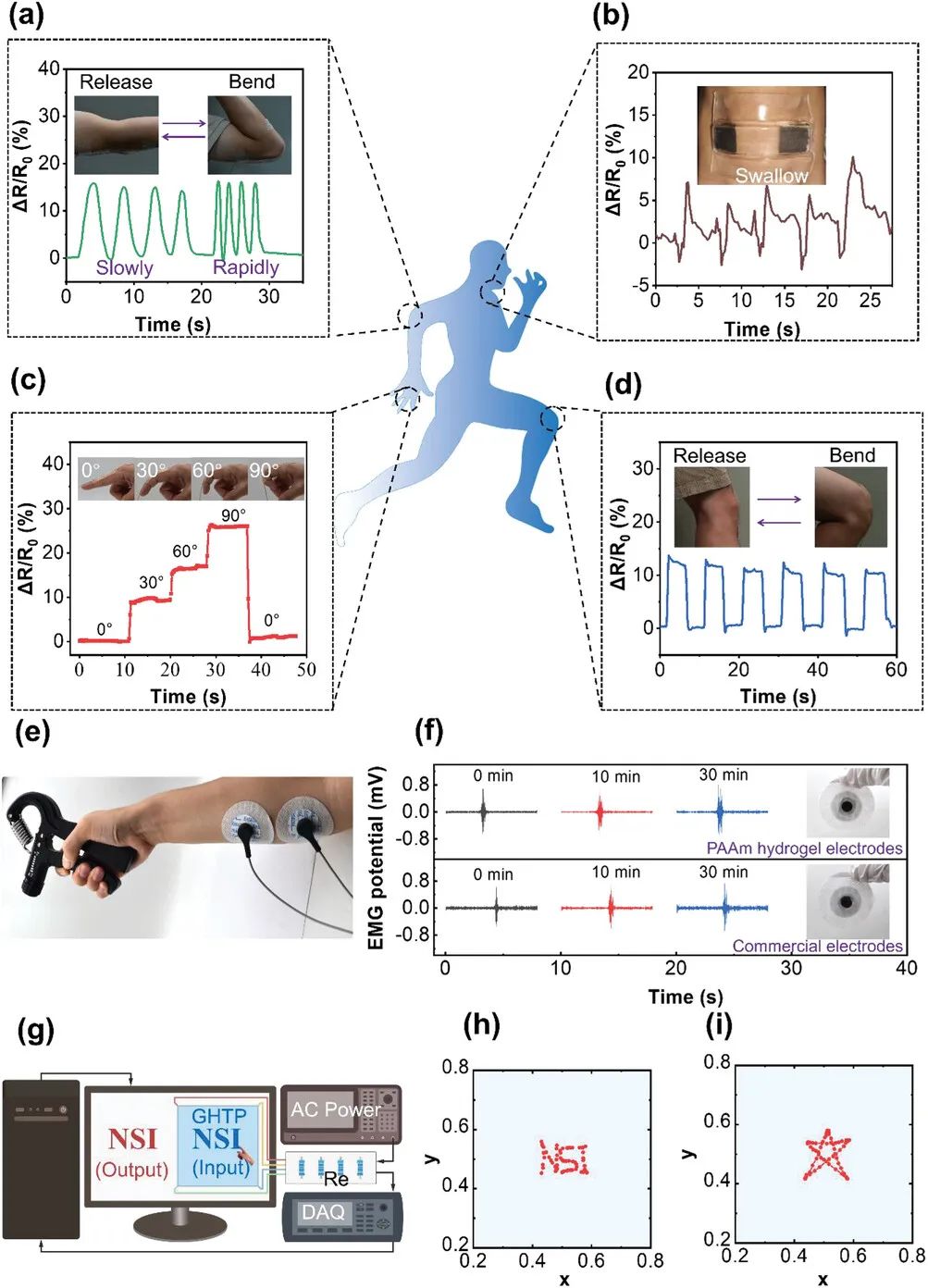
圖6. GHSS的應(yīng)用。a–d)肘關(guān)節(jié)彎曲和放松的相對(duì)阻力變化(a),“吞咽”運(yùn)動(dòng)(b),手指在0°、30°、60°和90°彎曲到不同角度(c),膝關(guān)節(jié)彎曲和松開(kāi)(d)。e) sEMG電極的照片。f) PAAm水凝膠電極和商用電極在0、10和30分鐘時(shí)的sEMG信號(hào)。g) 2D水凝膠觸摸屏系統(tǒng)的示意圖。h) 以及i)在2D水凝膠觸摸板的中心手寫(xiě)縮寫(xiě)“NSI”和五角星時(shí)輸出圖像。
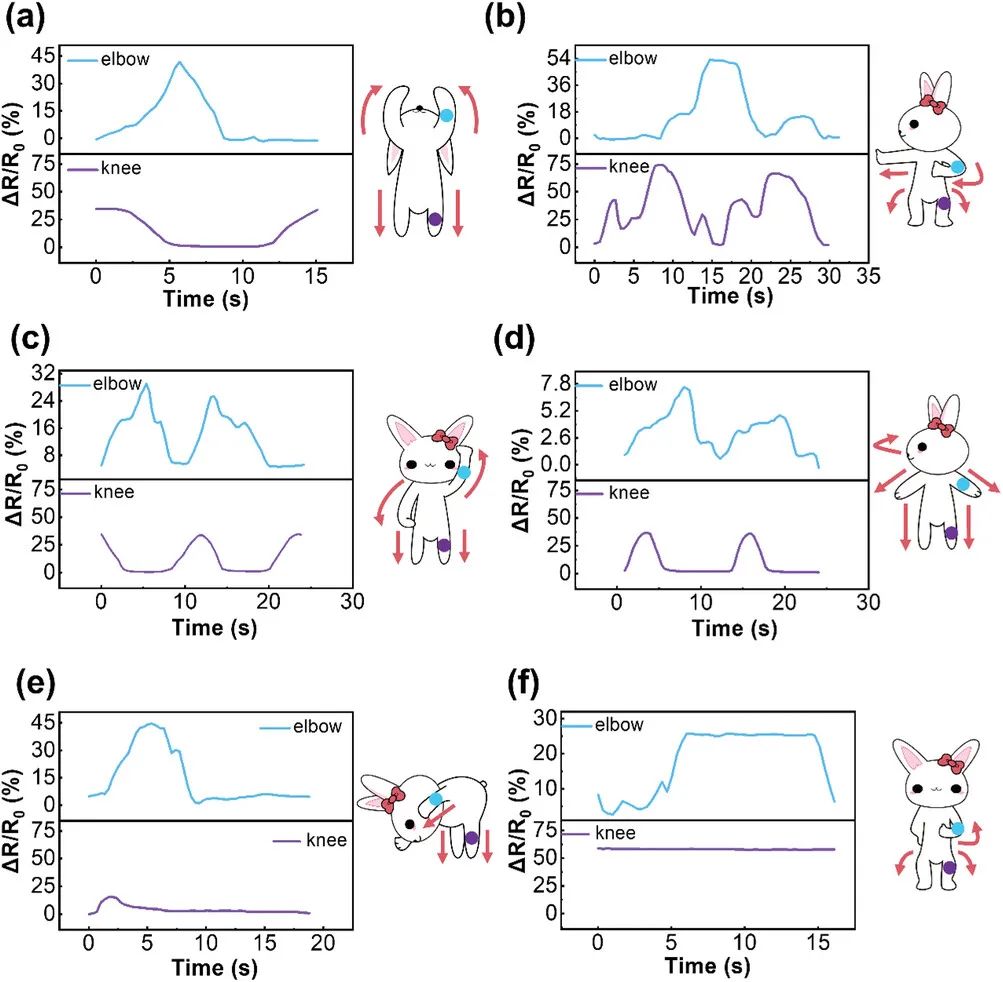
圖7. 多通道GHSS相對(duì)阻力變化檢測(cè)中國(guó)傳統(tǒng)八段錦運(yùn)動(dòng)的動(dòng)作。a) 姿勢(shì)1“雙手高舉天空,調(diào)節(jié)三個(gè)燃燒器”。b) 姿勢(shì)2“兩邊拉弓,好像要射禿鷹”。c) 姿勢(shì)3“舉起一只手臂調(diào)節(jié)脾胃”。d) 姿勢(shì)4“回頭看,緩解五種壓力和七種損傷”。e) 姿勢(shì)5“用手觸摸腳,以加強(qiáng)腎臟和腰部”。f) 姿勢(shì)6“用耀眼的眼睛伸出拳頭以增強(qiáng)力量”。
審核編輯 黃宇
-
運(yùn)動(dòng)傳感器
+關(guān)注
關(guān)注
9文章
168瀏覽量
31153
發(fā)布評(píng)論請(qǐng)先 登錄
石墨烯的基本特性和制備方法
關(guān)于石墨烯的全面介紹
全球首個(gè)高性能可拉伸自供能系統(tǒng)誕生電
中科院王曉龍團(tuán)隊(duì)實(shí)現(xiàn)雙網(wǎng)絡(luò)水凝膠的3D打印
研究人員開(kāi)發(fā)出3D打印石墨烯氣凝膠
幾種石墨烯基單一功能柔性傳感器介紹
可用于離電型傳感器可修復(fù)和多種環(huán)境適用的水凝膠
具有超拉伸性、自粘附性及自愈合與高靈敏的導(dǎo)電水凝膠傳感器

研發(fā)PAM@SiO2-NH2/石墨烯導(dǎo)電水凝膠傳感器

可拉伸導(dǎo)電水凝膠用于應(yīng)變傳感研究獲進(jìn)展
研究 \ 一種具有高導(dǎo)熱性石墨烯基相變復(fù)合材料
柔軟可拉伸的新型3D打印材料可改善可穿戴傳感應(yīng)用
3D石墨烯泡沫與水凝膠集成,打造本質(zhì)可拉伸運(yùn)動(dòng)傳感器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論