 如何解決車載CAN到CAN FD的升級困擾
如何解決車載CAN到CAN FD的升級困擾

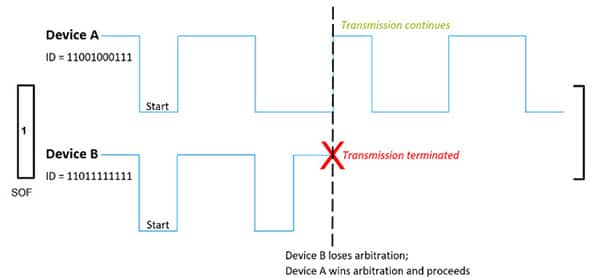
電子發燒友網報道(文/李寧遠)在汽車通信網絡里,CAN BUS指的是車載多路通信系統,其目的是簡化車輛線束并加快通信速度。CAN BUS會允許將多個設備(ECU)連接到一條通信線路并彼此交換數據,根據協議和通信速度的不同分為CAN和CAN FD系統。CAN的通信速度在500Kbps,CAN FD最高可以達到8Mbps。
兩種系統均使用屏蔽雙絞線通信,均為差動電壓。在數據長度上CAN只能在1至8Byte變化,而CAN FD的數據長度能在1至64Byte可變。上面說到CAN BUS會允許將多個設備連接到一條通信線路并彼此交換數據,一般有P2P連接、總線式連接和星狀式連接三種拓撲結構(以太網和LVDS僅支持P2P連接)。在實際的車輛中,通常是上述三種連接方法混合組成一個車載網絡。
車載CAN向CAN FD升級帶來哪些困擾
隨著CAN向CAN FD協議的升級,一些問題開始浮現出來。第一個問題是高速化會引起諧振現象,導致了錯誤判斷的可能性增加;第二個問題是電磁輻射頻段向高頻轉移,使得EMC應對變得更困難。
可以看出,在8Mbps的CAN FD下,諧振現象是最嚴重的,會影響對顯性和隱性區域的判斷。500Kbps速率下可以保證諧振現象收束后有足夠的反應時間,但若縮短1bit時間,則ECU錯誤率會明顯上升。引起諧振現象的原因主要有兩點,一是CAN線束分支點引起的反射(拓撲設計)、一是從ECU到線束在內的漏感和寄生電容。
要解決諧振現象,一是從設計上考慮,一是從共模濾波器上盡可能減少漏感和寄生電容。
共模濾波器如何解決諧振問題
CAN FD應用的共模濾波器的模式轉換特性,也就是對應的Ssd21參數是極為重要的。業界最高水平的模式轉換特性是通過包含繞組工藝的獨有結構設計,使泄漏電感、寄生電容、模式轉換特性最小化,針對比以往更容易受到諧振影響的CAN-FD應用進行了優化。
為了實現良好的Stray C對應CAN FD的要求,共模濾波器最好能覆蓋很廣的溫度范圍(-40℃至150℃)。共模濾波器的可靠性也是保證良好諧振的前提,一般會采用金屬端子以及激光焊接的繼線方式來提高器件的可靠性。這相比市場上較為傳統的鉚接方式可靠性等級提升了幾個層次。
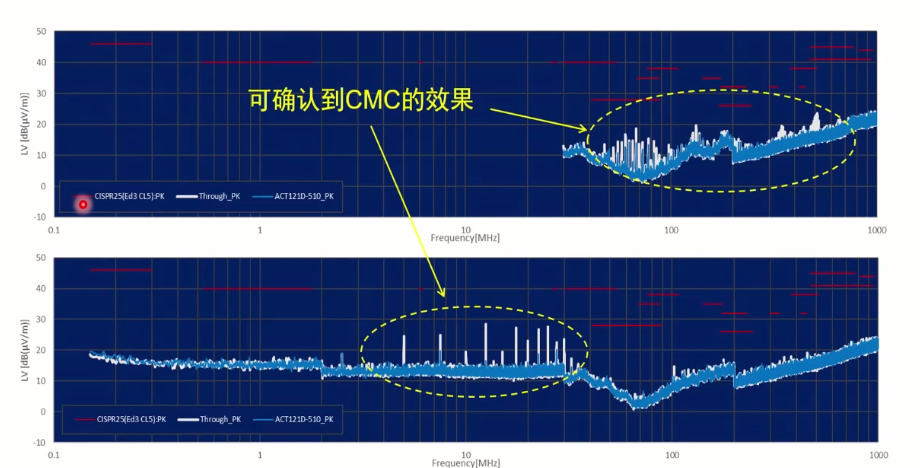
(是否添加共模濾波器的輻射EMI數據比較,TDK)
在不加共模濾波器的情況下,對于數據尖刺的抑制效果明顯比添加后的效果差很多。在輻射抑制得如此好的情況下,差分信號是否會受到影響,抑制到數據傳輸呢?答案是并不會,加入共模濾波器后差分信號波形與之前相比并不會發生劣化,不必擔心抑制效果會擴散到信號傳輸上。
另外如果傳輸速率很快,為了避免數據丟失或失真,共模濾波器本身會滿足相應的插損/回損要求,更詳細的應對辦法還是要看在PCB上的設計情況。
CAN BUS ESD如何應對
之前在討論ESD的文章中,我們說過了ESD抑制器和TVS二極管,是解決ESD防護和浪涌保護的有效手段。在車載通信網絡中,壓敏電阻與陶瓷片式電容器同樣是保護功能出色的保護器件。
壓敏電阻有碳化硅壓敏電阻和氧化鋅壓敏電阻,氧化鋅更為常見,很多廠商都以氧化鋅為基礎材料。高ESD耐量是保護器件最重要的特性之一。在經過多次電壓測試后,不同的壓敏電阻會有不同的電壓變化,優異的高ESD耐量壓敏電阻在測試中會幾乎沒有變化。
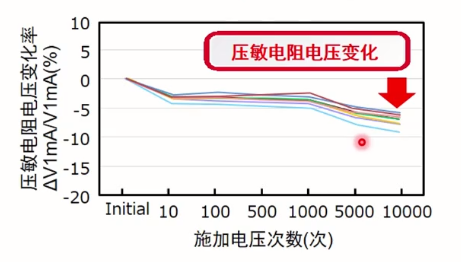
(壓敏電阻ESD耐量測試,TDK)
如何選擇合適的壓敏電阻并不算復雜,首先確保額定電壓要略低于壓敏電阻的擊穿電壓,再一點就是靜電容量。一般來說當壓敏電阻電壓相同時,靜電容量越大,靜電吸收能力以及耐久性越好。但是不能忽視的是在選擇時需要考慮到對應的通訊速度,不能一味選擇大靜電容量以至于影響到通訊速度。
另一點比較引人關注的問題是,在CAN BUS中,壓敏電阻會不會比TVS二極管響應得更慢。這個問題其實不必擔心,兩類器件在ESD鉗位電壓上性能都是相似的,而且兩種不同保護器件的抑制效果都會出現在1ns之前。不同于壓敏電阻的地方在于,單一方向的TVS因為擊穿電壓很低,會把差分電壓一起吸收掉,產生通信誤差。壓敏電阻則不會影響差分電壓。
小結
在汽車各種控制系統的電子設備中,為了實現更大數據量的高速通信,CAN通信系統的通信速度開始進一步提高。在通信速度加快的互聯時代,高性能的電子元件給予了系統高通信速度下足夠的可靠性。
兩種系統均使用屏蔽雙絞線通信,均為差動電壓。在數據長度上CAN只能在1至8Byte變化,而CAN FD的數據長度能在1至64Byte可變。上面說到CAN BUS會允許將多個設備連接到一條通信線路并彼此交換數據,一般有P2P連接、總線式連接和星狀式連接三種拓撲結構(以太網和LVDS僅支持P2P連接)。在實際的車輛中,通常是上述三種連接方法混合組成一個車載網絡。
車載CAN向CAN FD升級帶來哪些困擾
隨著CAN向CAN FD協議的升級,一些問題開始浮現出來。第一個問題是高速化會引起諧振現象,導致了錯誤判斷的可能性增加;第二個問題是電磁輻射頻段向高頻轉移,使得EMC應對變得更困難。
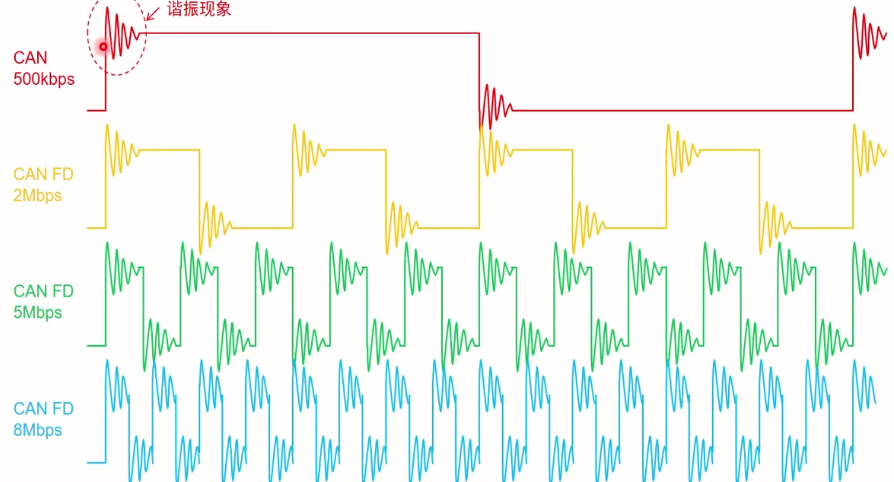
可以看出,在8Mbps的CAN FD下,諧振現象是最嚴重的,會影響對顯性和隱性區域的判斷。500Kbps速率下可以保證諧振現象收束后有足夠的反應時間,但若縮短1bit時間,則ECU錯誤率會明顯上升。引起諧振現象的原因主要有兩點,一是CAN線束分支點引起的反射(拓撲設計)、一是從ECU到線束在內的漏感和寄生電容。
要解決諧振現象,一是從設計上考慮,一是從共模濾波器上盡可能減少漏感和寄生電容。
共模濾波器如何解決諧振問題
CAN FD應用的共模濾波器的模式轉換特性,也就是對應的Ssd21參數是極為重要的。業界最高水平的模式轉換特性是通過包含繞組工藝的獨有結構設計,使泄漏電感、寄生電容、模式轉換特性最小化,針對比以往更容易受到諧振影響的CAN-FD應用進行了優化。
為了實現良好的Stray C對應CAN FD的要求,共模濾波器最好能覆蓋很廣的溫度范圍(-40℃至150℃)。共模濾波器的可靠性也是保證良好諧振的前提,一般會采用金屬端子以及激光焊接的繼線方式來提高器件的可靠性。這相比市場上較為傳統的鉚接方式可靠性等級提升了幾個層次。
(是否添加共模濾波器的輻射EMI數據比較,TDK)
在不加共模濾波器的情況下,對于數據尖刺的抑制效果明顯比添加后的效果差很多。在輻射抑制得如此好的情況下,差分信號是否會受到影響,抑制到數據傳輸呢?答案是并不會,加入共模濾波器后差分信號波形與之前相比并不會發生劣化,不必擔心抑制效果會擴散到信號傳輸上。
另外如果傳輸速率很快,為了避免數據丟失或失真,共模濾波器本身會滿足相應的插損/回損要求,更詳細的應對辦法還是要看在PCB上的設計情況。
CAN BUS ESD如何應對
之前在討論ESD的文章中,我們說過了ESD抑制器和TVS二極管,是解決ESD防護和浪涌保護的有效手段。在車載通信網絡中,壓敏電阻與陶瓷片式電容器同樣是保護功能出色的保護器件。
壓敏電阻有碳化硅壓敏電阻和氧化鋅壓敏電阻,氧化鋅更為常見,很多廠商都以氧化鋅為基礎材料。高ESD耐量是保護器件最重要的特性之一。在經過多次電壓測試后,不同的壓敏電阻會有不同的電壓變化,優異的高ESD耐量壓敏電阻在測試中會幾乎沒有變化。
(壓敏電阻ESD耐量測試,TDK)
如何選擇合適的壓敏電阻并不算復雜,首先確保額定電壓要略低于壓敏電阻的擊穿電壓,再一點就是靜電容量。一般來說當壓敏電阻電壓相同時,靜電容量越大,靜電吸收能力以及耐久性越好。但是不能忽視的是在選擇時需要考慮到對應的通訊速度,不能一味選擇大靜電容量以至于影響到通訊速度。
另一點比較引人關注的問題是,在CAN BUS中,壓敏電阻會不會比TVS二極管響應得更慢。這個問題其實不必擔心,兩類器件在ESD鉗位電壓上性能都是相似的,而且兩種不同保護器件的抑制效果都會出現在1ns之前。不同于壓敏電阻的地方在于,單一方向的TVS因為擊穿電壓很低,會把差分電壓一起吸收掉,產生通信誤差。壓敏電阻則不會影響差分電壓。
小結
在汽車各種控制系統的電子設備中,為了實現更大數據量的高速通信,CAN通信系統的通信速度開始進一步提高。在通信速度加快的互聯時代,高性能的電子元件給予了系統高通信速度下足夠的可靠性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
CAN
+關注
關注
57文章
2911瀏覽量
467392 -
CAN FD
+關注
關注
0文章
81瀏覽量
13102 -
雙絞線通信
+關注
關注
0文章
2瀏覽量
1789
發布評論請先 登錄
相關推薦
熱點推薦
汽車網絡升級攻略:CAN-CAN FD-車載以太網
汽車網絡架構升級,從CAN到CANFD及車載以太網,以滿足日益增長的通信需求。但升級過程中,如何確保不同節點的兼容性成了亟待解決的問題。今天


如何從傳統的CAN用法中設置CAN-FD?
您好 NXP:
我們在 s32k312 平臺中使用了經典的 CAN 總線(2.0/固定 8 字節數據),現在我們想升級
CAN-FD 格式。我設置了 CAN-FD 參數(經典
發表于 04-14 11:32
CAN總線十萬個為什么 | 如何輕松應對CAN(FD)接口不足?
導讀項目擴張時,CAN(FD)接口不足常常成為硬件工程師的痛點。本期將為您介紹一種高效解決方案,幫助您從根本上解決接口瓶頸問題,同時提升項目效率和系統可靠性。很多硬件工程師在項目擴張的時候,都需要
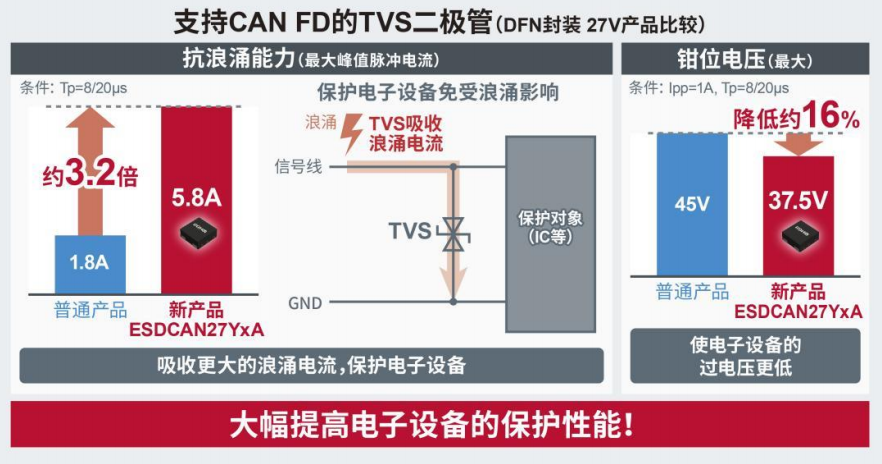
ROHM推出支持CAN FD的TVS二極管系列
專為支持CAN FD(CAN with Flexible Data rate,靈活數據速率CAN)總線端口保護而設計。 CAN
ROHM支持“CAN FD”的TVS二極管“ESDCANxx系列”
全球知名半導體制造商ROHM(總部位于日本京都市)面向隨著自動駕駛和高級駕駛輔助系統(ADAS)的發展而需求不斷增長的高速車載通信系統,開發出支持CAN FD(CAN with Fle
虹科干貨 三代CAN技術演進:從CAN CC到CAN XL的創新路徑(上篇)
CAN FD作為CAN技術的一個重要迭代,其高速率和大數據量的傳輸能力為現代汽車和其他需要高效數據傳輸的應用場景提供了有力的支持。從CAN CC到
【CAN總線知識】深度解析CAN-FD與CAN協議的差別
導讀隨著工業的發展,工業總線上的數據量越來越多,這使得CAN總線的逐漸達到負荷極限,這就需要改進原有的總線來提高總線傳輸速率,CAN-FD便在這樣的背景下誕生了。隨著當今工業的發展,尤其是在CAN
CAN FD與傳統CAN的區別是什么
隨著汽車電子、工業自動化的蓬勃發展,CAN總線上的設備數量、數據量都大大增加,給CAN總線帶來了極大的挑戰。為滿足更高的帶寬及數據吞吐量,CAN FD(

CAN-FD:CAN總線網絡第二章
日常工作中使用 CAN FD 的公司實習。無論哪種方式,本指南都會向您展示 CAN FD:具有靈活數據的 CAN 的相似點、差異和用例。

從替代到創新,國產CAN FD芯片持續突破
電子發燒友網報道(文/吳子鵬)隨著汽車電子、工業自動化設備的發展迭代,CAN總線上的設備、數據量都大大增加,給CAN總線帶來了極大的挑戰。因此,CAN FD應運而生。
虹科技術 全新Linux環境PCAN驅動程序發布!CAN/CAN FD通信體驗全面升級!
全新8.17.0版本的PCAN-Linux驅動程序正式發布,專為CAN和CAN FD接口量身打造。無論是CAN 2.0 a/b還是CAN
CAN FD如何滿足工業設備對高效數據通信的需求?
電子發燒友網報道(文/吳子鵬)作為CAN總線的升級版,CAN FD(CAN with Flexible Data rate)在數據長度和帶寬
CAN/CAN FD/CAN XL三大總線協議解讀,是逐步替代關系嗎?
電子發燒友網報道(文/吳子鵬)在軟件定義汽車逐漸成為主流的當下,數據傳輸的速度和效率成為打造智能汽車的瓶頸,在這種大背景下,傳統CAN總線應對一些需求已經相當吃力,因此CAN FD和CAN





 工商網監
工商網監
評論